Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 723501
Авторы: Андрюнин, Кулешов, Лысенко, Моисеенков, Шведов
Текст
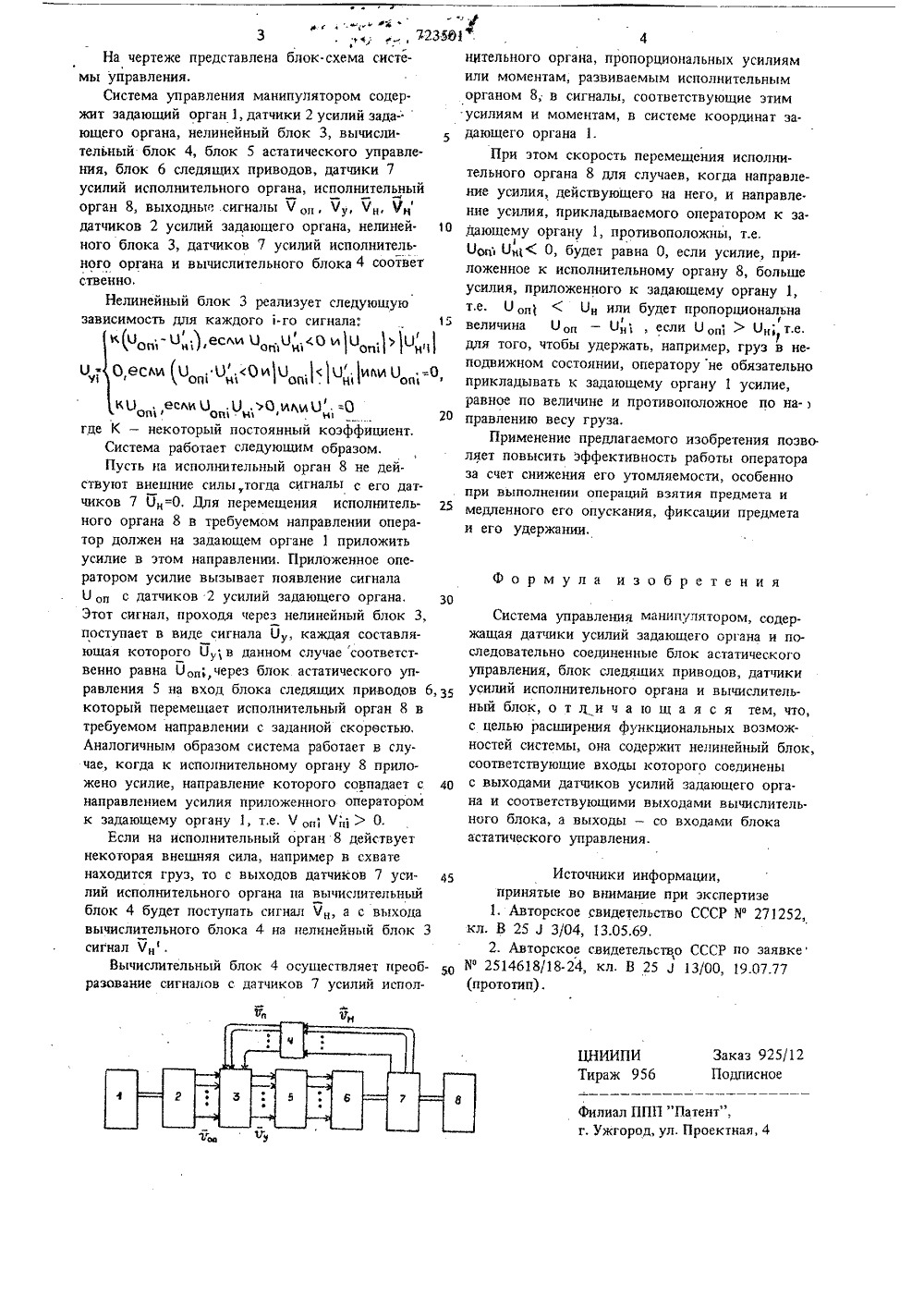
ВРЕТЕ Союз Советских Социалистических О723501 Республик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 61) Допол интел ьное к авт. с вид-ву23) Приоритет о лолам изобретен бликовано 25.03.80. Бюллетен исания 25.0ткры ата опубликования В, Андрюнин, В. С. Кулешов, С, А. Лысенко и В, Н.,Шведов Моисеенк Авторыобретения и ордена Трудового Красного Знамилище им, Н, Э. Баумана. осковско высше рдена Лениехническое(71).Заявител 54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ с соответствующими входами вычислительногоблока 21Эта система позволяет ощущать на задающем органе противодействующие усилия, при. ложенные к исполнительному органу, без применения приводов задающего органа и обеспе. чивает малую рабочую зону оператора. Однако при выполнении периодически повторяющихся операций взятия предмета и медленного его опускания, фиксации предмета одним исполни. тельным органом и работе с предметом другим исполнительным органом, длительном удержании тяжелых предметов система управления манипулятором затрудняет работу оператора и вызывает быстрое утомление.Целью изобретения является расширение функциональных возможностей системы.Цель достигается тем, что система содержит нелинейный блок, соответствующие входы которого соединены с выходами датчиков усилий задающего органа и соответствующими выходами вычислительного блока, а соответствующие выходы - со входами блока астатичесИзобнию и ростро- оздании универсал рованных лято звес 5 органа татичес ержаш посл ов 13 атчики у Она нь усирган. лия, деи Наиболеек изобретенидатчики усили тельно соедин ления, блок с лий исполните соединенныи входы котор юшим выхода м датчиков усил ды к соответств за аю ргана, авых лока астатич ов усилий и входам ы датчи ского управления, вь полнительного органа го управлени оединен етение относится к манипулято ожет быть использовано при с ьных промышленных или специ манипуляторов,на система управления манипу ая датчики усилий задающего вательно соединенные блок ас вления, блок следящих приво силий исполнительного органае позволяет оператору ощущат твуюшие на исполнительный о лизким техническим решением ю является системз, содержащая й задаюшего органа, носледоваенные блок астатического управледяших приводов, датчики усильного органа и последовательно ычислительный блок и сумматор, го подключены к соответству(53) УДК 62.53 " ," 2 ЛЕ 1На чертеже представлена блок. схема системы управления.иСистема управления манипулятором содер- о жит задающий орган 1, датчики 2 усилий зада-У ющего органа, нелинейный блок 3, вычислительный блок 4, блок 5 астатического управления, блок 6 следящих приводов, датчики 7 т усилий исполнительного органа, исполнительный орган 8, выходные сигналы Ч , Чу, Ч, 9 н датчиков 2 усилий задающего органа, нелиней ного блока 3, датчиков 7 усилий исполнитель- О ного органа и вычислительного блока 4 соответ ственно,Нелинейный блок 3 реализует следующую т. зависимость для каждого -го сигнала;г кО, еслиО .,О.,О,илиО;=Огде К - некоторый постоянный коэффициент.Система работает следующим образом.Пусть на исполнительный орган 8 не действуют внешние силы, тогда сигналы с его датчиков 7 О=О. Для перемещения исполнитель ного органа 8 в требуемом направлении оператор должен на задающем органе 1 приложить усилие в этом направлении. Приложенное оператором усилие вызывает появление сигнала О ос датчиков 2 усилий задающего органа, Этот сигнал, проходя через нелинейный блок 3, поступает в виде сигнала О, каждая составляющая которого Оу,в данном случае соответственно равна О ; через блок астатического управления 5 на вход блока следящих приводов 6, который перемещает исполнительный орган 8 в требуемом направлении с заданной скорестью.Аналогичным образом система работает в слу.чае, когда к исполнительному органу 8 приложено усилие, направление которого совпадает с 40 направлением усилия приложенного оператором к задающему органу 1, т.е. Ч ; Ч, ) О.Если на исполнительный орган 8 действует некоторая внешняя сила, например в схвате находится груз, то с выходов датчиков 7 усилий исполнительного органа на вычислительный блок 4 будет поступать сигнал Ч, а с выхода вычислительного блока 4 на нелинейный блок 3 сигнал Ч.Вычислительный блок 4 осуществляет преобразование сигналов с датчиков 7 усилий исполФормула изобретения30 аказ 925/12одписное ИИПИаж 956 лиал ППППатент,жгород, ул. Проектна к(и ,-О),еслио .,О,(Ои 1 О ,О 4цпельного органа, пропорциональных усилиям ли моментам, развиваемым исполнительным рганом 8; в сигналы, соответствующие этим силиям и моментам, в системе координат задающего органа 1.При этом скорость перемещения исполниельного органа 8 для случаев, когда направление усилия, действующего на него, и направле. ние усилия, прикладываемого оператором к задающему органу 1, противоположны, т.е,огй Он 1 О, будет равна О, если усилие, приоженное к исполнительному органу 8, больше силия, приложенного к задающему органу 1, е, О Ол 1 ( О или будет пропорциональна величина Оо - О;, если Оо; ) О; т.е. для того, чтобы удержать, например, груз в неподвижном состоянии, операторуне обязательно прикладывать к задающему органу 1 усилие, равное по величине и противоположное по на-правлению весу груза.Применение предлагаемого изобретения позво. ляет повысить эффективность работы оператора за счет снижения его утомляемости, особенно при выполнении операций взятия предмета и медленного его опускания, фиксации предмета и его удержании. Система управления манипулятором, содержащая датчики усилий задающего органа и последовательно соединенные блок астатического управления, блок следящих приводов, датчики усилий исполнительного органа и вычислительный блок, о т л и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей системы, она содержит нелинейный блок, соответствующие входы которого соединены с выходами датчиков усилий задающего органа и соответствующими выходами вычислитель. ного блока, а выходы - со входами блока астатического управления. Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР У 271252,кл. В 25 Л 3/04, 13.05.69,2 Авторское свидетельство СССР по заявкеИ 2514618/18-24, кл. В 25 1 13/00, 19.07.77
СмотретьЗаявка
2593229, 23.03.1978
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
АНДРЮНИН ВАЛЕРИЙ ВИКТОРОВИЧ, КУЛЕШОВ ВЛАДИМИР СЕРГЕЕВИЧ, ЛЫСЕНКО СЕРГЕЙ АРКАДЬЕВИЧ, МОИСЕЕНКОВ ВАЛЕРИЙ АКСЕНТЬЕВИЧ, ШВЕДОВ ВАЛЕРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: манипулятором
Опубликовано: 25.03.1980
Код ссылки
<a href="https://patents.su/2-723501-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Датчик для измерения глубины хода рабочих органов сельскохозяйственных машин

Номер патента: 745400
Опубликовано: 05.07.1980
Авторы: Галаджев, Нагорский, Распопов, Скотников, Ханко, Шуринов
МПК: A01B 65/06
Метки: глубины, датчик, машин, органов, рабочих, сельскохозяйственных, хода
...А - А фиг. 1.Датчик включает корпус 1 в виде н чувствительные элементы-вибропреоб ватели 2, воспринимающие элементы рых в виде игл 3 заключены в резин втулки 4. Воспринимающие элементы 3динены с вибропреобразователями 2 переходником 5 из диэлектрического материала. Сигнал с вибропреобразователя 2 снимается двумя токосъемниками 6, заключенными в резиновую втулку 7, являющуюся одновременно с держателем вибропреобразователя 2. На наружной поверхности корпуса 1 между чувствительными элементами 2 расположены предохранительные элементы в виде шипов 8 треугольной формы и высотой не менее выступающей части воспринимающих элементов 3. Центры чувствительных элементов 2 и предохранительных шипов 8 размещены на наклонной прямой, расположенной в...
Трехфазный электродвигатель с датчиком блока защиты

Номер патента: 1742945
Опубликовано: 23.06.1992
Автор: Чернов
МПК: H02K 11/00
Метки: блока, датчиком, защиты, трехфазный, электродвигатель
...укладки вторичной обмотки и расход обмоточного провода,Наиболее близким по технической сущности к предлагаемому является устройство для защиты трехфазных.электродвигателей, содержащее в качестве датчика обмотки, состоящие из трех катушек, каждая из которых помещена на собственном магнитопроводе вокруг его продольного сечения.. Недостаток известного устройства проявляется в различном характере сигнала (возрастает, убывает) при различных аномалиях, возникающих в процессе работы электродвигателя (перегрузки по току, обрыв фазы сети и пр.), что усложняет селекцию сигналов,Цель изобретения - повышение эффективности защиты.Для достижения поставленной цели трехфазный электродвигатель с датчиком блока защиты, содержит статор с обмоткой,...
Блок для ленточного тягового органа

Номер патента: 937323
Опубликовано: 23.06.1982
МПК: B66D 3/08
Метки: блок, ленточного, органа, тягового
...шин скольжения 4 и 5 (от точкинабегания (сбегания)ленточного тяговаго органа 7 до конца шин 4 и 5 состороны батареи роликов) превышает на15-30 о углы " отклонения тягового ор".гайа 7.Предлагаемый блок работает следующим образом. ООгибающий блок гибкий тяговыйорган 7 при движении скользит поучасткам блока - шинам 4 и 5 и перемещается по роликам 2 батареи,На шинах 4 и 5 скольжения при выходе на блок тяговый орган 7 изгибается до радиуса Й, не испытывая резкого перегиба, а при выхбде выпрямля-ется из изогнутого по радиусу Й сос"тояния, При переходе с шин 4 и 5 нароликовую батарею, ввиду того, чтозаглубление их выполнено по радиусуг, равному (больше) радиусу г роликов 2, и концы их отстоят от роликов 2на расстояние, равное расстоянию...
Датчик перемещения органов торможения для систем сигнализации автомобиля

Номер патента: 1133143
Опубликовано: 07.01.1985
Автор: Шилов
МПК: B60Q 1/44
Метки: автомобиля, датчик, органов, перемещения, сигнализации, систем, торможения
...иразмыкающими контактами, снабженустановленными соосно со штоком тремя контактными дисками с отверстиямидля направляющих шпилек, закрепленныхв корпусе цилиндра, и размещенноймежду ними посредством распорныхпружин кареткой, несущей на себе контакты, взаимодействующие с контакта 1ми, размещенными на одном из контакт-,ных дисков, выполненном диэлектри-ческим, и контакт Г-образной формыв сечении, установленный с возможностью взаимодействия со среднимконтактным диском, при этом цилиндрвыполнен с дросселирующими отверстия.ииеНа чертеже изображен датчик,разрез.Датчик содержит цилиндр 1 с дросселирующими отверстиями 2, в которомразмещен поршень 3 со штоком 4,.установленные соосно со штоком33143 Хконтактные диски 5-7 с отверстиямидля...
Задающее устройство перемещений рабочего органа роторного экскаватора

Номер патента: 349982
Опубликовано: 01.01.1972
Авторы: Белоцерковский, Бодр, Дегт, Ничик, Прасол, Родненко, Чайка
МПК: G05D 3/12
Метки: задающее, органа, перемещений, рабочего, роторного, экскаватора
...д сельсина 3параллельно о лючен конден сатор бсльшо я повышения349982 крел Л. Богда аз 409 ЦНИИ 618 Изл.1208И Комитета по делам ипри Совете ЧинистМосква, Ж, Раушск тира обрет ов.С я на олписноетий л 06ийиоРд. 4/5 четкости прп согласовании, на выход используемых фаз обмотки ротора дифференциального сельсина 3 включен замыкающий контакт 8 испэлпительного реле б малых перемещений.Еще один замыкающий контакт 9 исполнптельного реле б включен в,цепь счетчика 1 б оольших перемещений, кратных числу малых перемвщвний. На выход счетчика 1 б на один из выводов (1+и) включено исполнительное реле 17 больших перемещений, замьпса 1 ощий контакт 18 которого включен в цепь сброса счетчика 1 б.Работает устройство следующим образом.При включении...
Предыдущий патент: Система автоматического управления технологическими параметрами
Следующий патент: Цифровой регулятор
Случайный патент: Генератор импульсов