Система автоматического управления технологическими параметрами
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
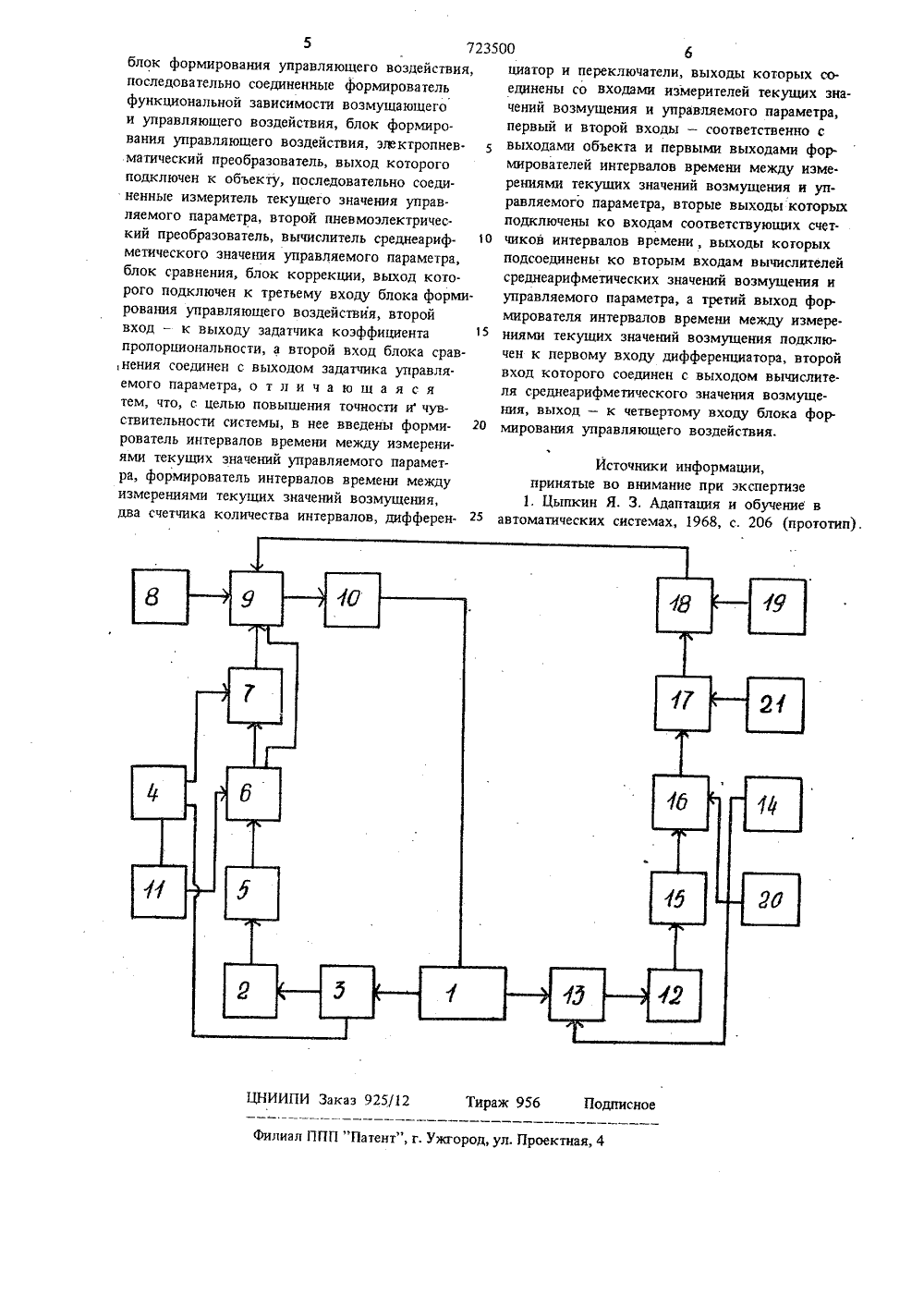
Союз СоветскихСоциалистическихРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 11723500 Ф(28) Приоритет оо делам иэобретеннй и открытий Опубликовано 25.03.80. Бкзллетень11(088.8) Дата опубликования описания 25.03.80(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПАРАМЕТРАМИ Изобретение относится к автоматическому управлению технологическими процессами, па.раметры которых обладают случайными свойствами.Управление представляет собой такой способ проведения процесса, который обеспечивает достижение максимального приближения реального процесса к критерию, характеризующему его оптимальность. Для случайных процессов известны системы управления, в которых ука 1 О занная цель достигается посредством максималь. ного использования текущей информации о состоянии объекта.Наиболее близкой к предлагаемому решению является адаптивная система, где управля 15 ющее воздействие формируется в функции скользящего среднего арифметического значения возмущающего фактора.Система включает в себя последовательно соединенные измеритель текущего значениявозмущения, пневмоэлектрнческий преобразователь, Вычислитель среднеарифметическогозначения возмущения, блок формирования управляющего воздействия, последовательно соединенные формирователь функциональной зависимости возмущающего и управляющего воздействий, блок формирования управляющего воздействия, первый электропневматический преобразователь, вход которого подключен к объекту, последовательно соединенные измеритель текущего значения управляемого параметра, второй пневмоэлектрический преобразова. тель, вычислитель среднеарифметического зна. чения управляемого параметра, блок сравнения, блок коррекции, выход которого подключен к третьему входу блока формирования управляющего воздействия, второй вход - к выходу задатчика коэффициента пропорциональнос. ти, а второй вход блока сравнения соединен с выходом задатчика управляемого параметра 1.Недостаток указанного технического реше. ния заключается в том, что он не учитывает характер перехода скользящего среднего арифметического значения возмущения от одного установившегося состояния к другому.Цель изобретения - разработка системы управления случайным процессом, в которой723500значений 2 через переключатель 3, управляемыйформирователем 4 и через пневмоэлектропреобразователь 5 поступает на вычислитель 6 для вы.числения среднего арифметического значения х,1Далее производится определение скорости изменения этих средних за время между смежнымиизмерениями -. Сигналы средних зн чений6 гДвозмущения х; из блока 6, и скоростейиз дифференциатора 7 и сигнал задания фун 10 кциональной зависимости из формирователя 8поступает в блок 9, где формируется управляющее воздействие Е, которое через электро.па- пневмопреобразователь 10 посылает сигнал наен. исполнительный орган для воздействия на тем 15 пературу реактора, где происходит процессобезвоживания.уп. Контролируя управляемый параметр и вых числяя его среднее арифметическое значениеу (аналогично, как и у возмущения) за определенный интервал времени, его сравниваютс требуемым значением у, В случае отклоРпения действительного значения от расчетного,сигнал рассогласования иэ блока 17 поступаетв блок 18 для формирования корректирующе 25 го воздействия, которое поступает в блок 9й и суммируется с уже имеющимся управляющимвоздействием.Анализируя переходные процессы известного и предложенного технического решения виЗО дим, что в известном устройстве переходныйпроцесс на стадии обезвоживания по каналуводы - температура, в реакторе имеет колебательную характеристику продолжительностьюмы, порядка 30 мин и интегральную оценку 3 == 167,7, в то время, как при использованиипредлагаемого технического решения переходный процесс по вышеуказанному каналу имеетй экспоненциальную характеристику и продолжительность до 17 мин, а интегральную оценку,40 равную 3 = 107,1,7, Предлагаемое техническое решение позволяет добиться повышения точности и чувствиблок тельности системы и обеспечить наибольшее 3устранен этот недостаток и обеспечивается повышение устойчивости управляемого параметрапутем повышения точности и чувствительностисистемы управления.Цель достигается тем, что в систему вводяформирователь интервалов времени между измерениями текущих значений управляемого параметра, формирователь интервалов временимежду измерителями текущих значений возмущения, два счетчика .количества интервалов,дифференциатор и переключатели, выходы которых соединены со входами измерителей текущих значений возмущения и управляемогораметра, первый и второй входы - соответствно с выходами объекта и первыми выходамиформирователей интервалов времени между измерениями текущих значений возмущения иравляемого параметра, вторые выходы которыподключены ко входам соответствующих счетчиков интервалов времени, выходы которыхподсоединены ко вторым входам вычислителясреднеарифметических значений возмущения иуправляемого параметра, а третий выход формирователя интервалов времени между измерениями текущих значений возмущения подключен к первому входу дифференциатора, второвход которого соединен с выходом вычислителя среднеарифметического значений возмущения, выход - к четвертому входу блока формирования управляющего воздействия.В качестве примера рассмотрена стадияобезвоживания алкилфенолята натрия в производстве алкилсалицилатных присадок,На чертеже представлена блок-схема систеСистема содержит объект управления 1, измеритель 2 текущих значений возмущения, иреключатель 3, формирователь 4 интерваловвремени между измерениями текущих эначенивозмущения, пневмоэлектрический преобразователь 5, вычислитель 6 среднего арифметического значения возмущения, дифференциаторформирователь функциональной зависимостивозмущения и управляющего воздействия 8,формирования управляющего воздействия 9,электропневматический преобразователь 10, 45счетчик 11 количества интервалов, измеритель 12текущих значений управляемого параметра, пере.ключатель 13, формирователь 14 интервалов времени между измерениями управляемого пара.метра, второй пневмоэлектрический преобразо- рватель 15, вычислитель 16 среднеарифметического значения управляемого параметра, блоксравнения 17, блок 18 коррекции, задатчик 19коэффициента пропорциональности, счетчик 20количества интервалов, задатчик 21 управляемого параметра.Устройство работает следующим образом.Возмущающее воздействие, поступающеена объект 1 измеряется измерителем текущих согласование характера изменения управляюще.го воздействия с характером изменения возмущения, что приводит к повышению устойчивости управляемого параметра и в конечномитоге к улучшению качества получаемого продукта,Формула изобретения Система автоматического управления технологическими параметрами, содержащая по-,. следовательно соединенные измеритель текущего значения возмущения, первый пневмо. электрический преобразователь, вычислитель среднеарифметического значения возмущения,723500 ИИПИ Заказ 925/12 раж 956 сное ал ППП "Патент", г. Ужгород, ул. Проектная, 4 блок формирования управляющего воздействия,последовательно соединенные формировательфункциональной зависимости возмущающегои управляющего воздействия, блок формирования управляющего воздействия, электропневматический преобразователь, выход которогоподключен к объекту, последовательно соединенные измеритель текущего значения управляемого параметра, второй пневмоэлектричес.кий преобразователь, вычислитель среднеариф Ометического значения управляемого параметра,блок сравнения, блок коррекции, выход которого подключен к третьему входу блока формирования управляющего воздействия, второйвход - к выходу задатчика коэффициентапропорциональности, а второй вход блока срав,нения соединен с выходом задатчика управляемого параметра, о т л и ч а ю щ а я с ятем, что, с целью повышения точности и чувствительности системы, в нее введены формирователь интервалов времени между измерениями текущих значений управляемого параметра, формирователь интервалов времени междуизмерениями текущих значений возмущения,два счетчика количества интервалов, дифференциатор и переключатели, выходы которых со.единены со входами измерителей текущих значений возмущения и управляемого параметра,первый и второй входы - соответственно свыходами объекта и первыми выходами формирователей интервалов времени между измерениями текущих значений возмущения и управляемого параметра, вторые выходы которыхподключены ко входам соответствующих счетчиков интервалов времени, выходы которыхподсоединены ко вторым входам вычислителейсреднеарифметических значений возмущения иуправляемого параметра, а третий выход формирователя интервалов времени между измерениями текущих значений возмущения подключен к первому входу дифференциатора, второйвход которого соединен с выходом вычислителя среднеарифметического значения возмущения, выход - к четвертому входу блока формирования управляющего воздействия. Источники информации,принятые во внимание при экспертизе1. Цыпкин Я. 3. Адаптация и обучение вавтоматических системах, 1968, с. 206 (прототип).
СмотретьЗаявка
2385632, 15.07.1976
ПРЕДПРИЯТИЕ ПЯ А-5593
АКИМОВА НАТАЛЬЯ ВЯЧЕСЛАВОВНА, МАНОЙЛО АЛЕКСАНДР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: параметрами, технологическими
Опубликовано: 25.03.1980
Код ссылки
<a href="https://patents.su/3-723500-sistema-avtomaticheskogo-upravleniya-tekhnologicheskimi-parametrami.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления технологическими параметрами</a>
Устройство для измерения параметров вибрации

Номер патента: 1244503
Опубликовано: 15.07.1986
МПК: G01H 11/06
Метки: вибрации, параметров
...измеряются значения интервалов между пЕрвым поступившим на его вход импульсом и последующими, Измеренные значения интервалов фиксируются в блоке 15 памяти временных интервалов в соответствии с сигналами, определяющими принадлежность каждого значения конкретному датчику, которые пос упают с второго выхода коммутатора 3 на второй вход блока 15. Импульсом с третьего выхода формирователя 13 значения временных интервалов считываются из блока 15 и поступают ца третий вход регистратора 4, в котором регистрируются в виде диаграммы распределения по длине конструкции времени распространения фронта удара.Предлагаемое устройство позволяетизмерять параметры не только установившихся колебаний конструкции, но и определять такие параметры...
Устройство для определения среднего значения интервалов времени

Номер патента: 943744
Опубликовано: 15.07.1982
МПК: G06F 17/18
Метки: времени, значения, интервалов, среднего
...при этом выход генераторашума подключен к первому входу блока45запоминания, выход которого соединен совторым входом фазового модулятора, второй вход блока запоминания соединенсо вторым входом селектора и являетсявходом устройства,На чертеже изображена функциональная схема устройства для определениясреднего значения интервалов времени.Устройство содержит генератор шума1, генератор 3, выход которого подкшочен к первому входу фазового модулятора 2, Второй вход фазового модуляторасоединен с выходом блока запоминания 9,фпервый вход которого подключен к выходу генератора шума. Выход фазового модулятора через умножитель частоты 4 соединен с первым входом селектора 5.Второй вход селектора соединен со вторым входом блока запоминания 9 и...
Блок управляемой проводимости

Номер патента: 1310849
Опубликовано: 15.05.1987
Авторы: Белоусов, Малиновский
МПК: G06G 7/12
Метки: блок, проводимости, управляемой
...Ч =спреобразовательС =6.,(+с 2 )Значение Слг изменяется приблизительно в два раза при изменении О десятичного эквивалента входного кода в пределах 0ц2, что позволяет получить малую дискретность установки СлгВ частном варианте блока управля емой проводимости, приведенном на фиг.2, позиции 1-4 и 8-10 (за исключением отсутствующего шифратора 9) соответствуют позициям на общей структурной схеме фиг,1Позицией 5 обо значен не масштабный алгебраический сумматор 5 в целом, а входящий в его состав операционный усилитель (ОУ), позициями 6 и 7 обозначены масштабные резисторы, соответствуЮ- щие на фиг. входам 6 и 7, Схема фиг.2 содержит также масштабные резисторы 11 и 12.Блок управляемой проводимости (фиг,2) работает следующим образом, 30Входное...
Блок управляемой задержки

Номер патента: 1424058
Опубликовано: 15.09.1988
Авторы: Баранцев, Гудым, Майструк, Фуников
МПК: G11C 21/00
Метки: блок, задержки, управляемой
...заде ржки и полосачастот входного сигнала увеличатся в 2 разя,Основным чзлам ус гройс тнд является рециркулятор, предназначенный для записи, сжатия а времени и задержки сигнала, Он мажст б.)ть ыпсл - лен в дналагсиам или цифровом варианте и иметь рдэли ные извес.тыс дппаратурные решения. 3 устрайсте применены цифровые рециркулятары, ыпалненные на микросхемах серии 505 155, Пля синхрс ниалии працсгс в загиси и сдвига сигнала в рециркуляторе используется паследавд;елнос ь с ныхада генератора , пчльав, алев дуюшая с периодам Т, , и импу.ьс записи сигнала в рспирклятар алев1дуюший с периодом 1,= Т/К = Т 1, соответственно с выхода элемента ИЛИ 9 рециркулятора 2 или с ньхода блока 10 сравнения реццркулятора 3, Период5 циркуляции выборки...
Блок управляемой проводимости

Номер патента: 1711195
Опубликовано: 07.02.1992
Автор: Белоусов
МПК: G06G 7/12
Метки: блок, проводимости, управляемой
...номинал матрицы 3;р - десятичный эквивалент двоичного М - разрядного управляющего кода.Полагая входное сопротивление повторителя 5 напряжения достаточно большим, а также пренебрегая ошибкой статизмв ОУ 4, можно утверждать, что эквивалентная проводимость Оэкв между выводами 1 и 2 составляет Поскольку повторитель напряжения 5 выравнивает потенциалы выходных шин выводов) 111, И и Ч, то действие паразитных емкость Оэ между выходами 111 и И, а также между каждым выходом и экраном- подложкой Ч оказывается значител ьнс уменьшено. Это улучшает динамические ха 30 35 40 45 рактеристики блока (уменьшает длительность и выбросы переходного процесса при смене кода), уменьшает реактивную составляющую эквивалентной проводимости. Кроме того,...
Предыдущий патент: Регулятор положения
Следующий патент: Система управления манипулятором
Случайный патент: Устройство для образования скважин в грунте