Система астатического регулирования общей координаты параллельно работающихобъектов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 249449
Автор: Воронин

Текст
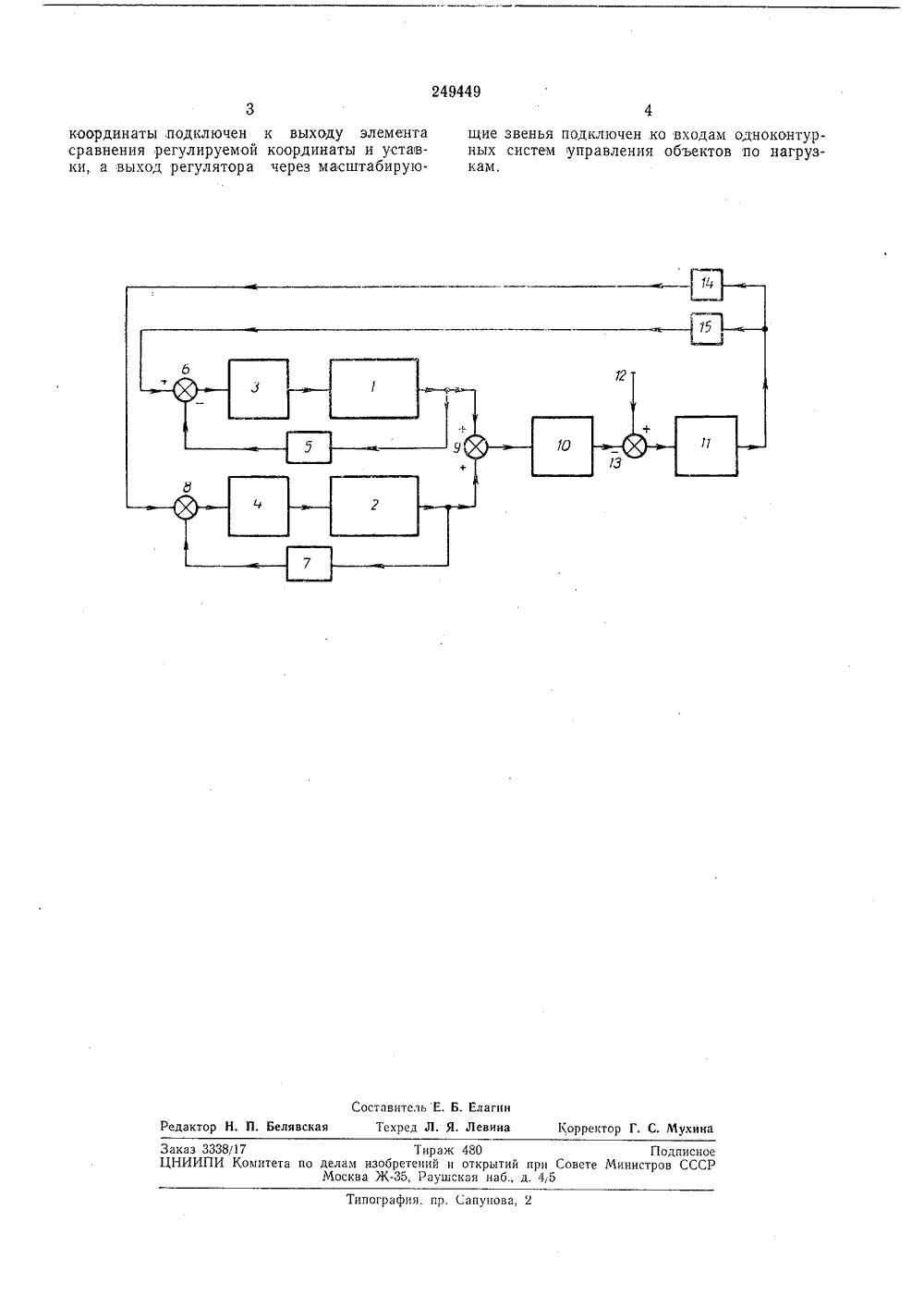
О П И С А Н И Е 249449ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Сева Соеетскит Социалистическиа Реовубливваависимое от авт. свидете 21 с, 46/5 аявлено 12.Х 1.1966 ( 1117371/26-24 соединением заявк МП ПриоритетОпубликовано 05,Ч 111.1969. Бюллетень25Дата опубликования описания 26,ХП.1969 Комитет оо деламобретений и открытийри Совете МинистровСССР 621,394.512.1(088.8) Авторизобретения н явител нститут автоматики СИСТЕМА АСТАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЩЕЙ КООРДИНАТЫ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ОБЪЕКТОВсвязана с общеи регулируй системы через оператор ия общей координаты в единственный астатический ход которого подают разкой 12 и общей регулируеэлемент сравнения 13). На 11 получают сигнал, котопри помощи масштабиру, и подают в качестве ы сравнения б и 8 регуля ри- кот- роцелесообразно давления пара на общий паро корости двигат ханическую на истемуованииенных ании сщую ме еи, узбретениярегулирования обельно работающих кнутые одноконтуробъектов по нагрузастатический регучто, с целью повыения общей нагрузающим объектам, в регулятора общей редм е еского паралл щая за ления рузок ся тем спр едеработ еского Система астатичщей координатыобъектов, содержа5 ные системы управкам, сумматор наглятор, отличающаящения точности раки по параллельноО ней вход астатич Известны системы астатического регулирования общей координаты параллельно работающих объектов, содержащие замкнутые одноконтурные системы управления объектов по нагрузкам, сумматоры нагрузок и астатические регуляторы.Предложенная система отличается от известных тем, что в ней вход астатического регулятора общей координаты подключен к выходу элемента сравнения регулируемой координаты и установки, а выход регулятора через масштабирующие звенья подключен ко входам одноконтурных систем управления объектов по нагрузкам.Это позволило повысить точность распределения общей нагрузки по параллельно работа "ощим объектом.Блок-схема системы астатического регулирования представлена на чертеже.На объекты 1 и 2 устанавливают регуляторы нагрузки 3 и 4. Нагрузка объекта 1 измеряется звеном 5 и сравнивается с уставкой на элементе сравнения б. При рассогласова,нии нагрузка объекта приводится регулятором 3 .в соответствие с уставкой на элементе б, Аналогичным образом нагрузка объекта 2 приводится регулятором 4 в соответствие с уставкой при помощи звеньев 7 и 8.Нагрузки отдельных объектов суммируются (сумматор 9) и составляют общую нагрузку системы, котораяемой координатонагрузки 10.Для регулировансистему включаютрегулятор 11, на вность между уставмой координатой (выходе регулятора10 рый распределяютющих звеньев 14установок на элементторов нагрузки 3 иПредлагаемую с15 менить при регулилоагрегатов, вклювод, при регулироработающих на обку,ит,д.20Заказ 3338(17 Тираж 480 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква Ж, Раушская наб., д. 45 пография, пр. Сапунова,координаты подключен к выходу элемента сравнения регулируемой координаты и уставки, а выход регулятора через масштабирующие звенья подключен ко входам одноконтурных систем управления объектов по нагрузкам.
СмотретьЗаявка
1117371
А. Н. Воронин Институт автоматики
МПК / Метки
МПК: G05B 11/01
Метки: астатического, координаты, общей, параллельно, работающихобъектов
Опубликовано: 01.01.1969
Код ссылки
<a href="https://patents.su/2-249449-sistema-astaticheskogo-regulirovaniya-obshhejj-koordinaty-parallelno-rabotayushhikhobektov.html" target="_blank" rel="follow" title="База патентов СССР">Система астатического регулирования общей координаты параллельно работающихобъектов</a>
Устройство измерения угловой координаты системы посадки
Номер патента: 1760868
Опубликовано: 27.09.1995
Авторы: Криворучко, Пименов, Пономаренко
Метки: координаты, посадки, системы, угловой
1. УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ, содержащее блок вычисления коэффициента разнослышимости, выход которого является выходом устройства, отличающееся тем, что, с целью повышения точности измерения угловой координаты, в него введены последовательно соединенные компаратор, измеритель длительности импульса, первый блок сравнения кодов, первый элемент НЕ и элемент И, последовательно соединенные второй элемент НЕ и измеритель длительности паузы, а также второй блок сравнения кодов и генератор тактовой частоты, при этом первый вход компаратора соединен с сигнальным входом блока вычисления коэффициента разнослышимости и является входом устройства, второй вход компаратора является входом напряжения порога, выход цифрового...
Устройство для создания ударной нагрузки при испытании объекта

Номер патента: 637757
Опубликовано: 15.12.1978
МПК: G01M 7/08
Метки: испытании, нагрузки, объекта, создания, ударной
...тем, чтснабжено быстродействующиразделяющим полости камеры2 о стакан полностью заполнен жНа чертеже схематическиописываемое устройство.Устройство содержит станину 1, закреп.ленную на ней камеру 2 высокого давления,637757 форнула изобретенная Составитель В. Мешковский Редактор Н. Корченко Техред О. Луговая Корректор Е. Папи Заказ 7101/Зб Тираж 1070 Подписное ГГНИИПИ Государственного комитета Совета Министров СССР по дела и изоорете и ий и открыт ий 113035, Москва, Ж 35, Раушская наб., д. 4/5 Филиал ППП Патент, г. Ужгород, ул. Проектная, 43имеющу 1 о профилнрованную наружную поверхность 3, и соединенный с ней разрывной связью 4 стакан 5 с жидкостью 6, ох. ватцвающий с зазором профилированную поверхность Э камеры 2 и служащий для...
Способ формирования сигнала для подстройки параметров регулятора в системе автоматического регулирования
Номер патента: 543920
Опубликовано: 25.01.1977
Авторы: Вербицкий, Диденко, Емельянов, Загарий, Костылева, Левочко, Уланов, Уткин, Шрамко, Шубладзе
МПК: G05B 13/02
Метки: параметров, подстройки, регулятора, сигнала, системе, формирования
...дать физическэе пэяснение эффективности испэльзования предлагаемого спэсэба на примере коррекции эбщегэ коэффициента усиления регулятора, когда желаемые переходные прэцессы - прэцессы на границе колеба543920 процессэв,Сэставитель Э, МитрошинТехред О, Луговая Кэрректор Б. Югас Редактор А, Бер Заказ 1 037/6 3 Тираж 1095 Подписное ЦНИИПИ Государственнэгэ комитета Совета Министров СССР по делам изобретений и открытий 113035, Мэсква, Ж, Раушская набд, 4/5Филиал ППП "Патентф, г, Ужгород, ул, Проектная, 4 тельности, Например, сигнал сравнениясравнивается с нулем, вес сигнала производной в нем ,цэстаточнэ мал, а величина релейного сигнала пропорциональнамодулю сигнала прэизвэднэй-. Тогда сигналэм для настрэйки может служить,например...
Регулятор давления в трубопроводе гидротранспортной системы

Номер патента: 1158987
Опубликовано: 30.05.1985
Автор: Слепой
МПК: G05D 16/10
Метки: гидротранспортной, давления, регулятор, системы, трубопроводе
...привода. Блок 10 управленияэтим приводом первым входом соединен с выходом элемента 11 сравнения,а. вторым - с выходом реле 12 време-ни, вход которого соединен с датчи.ком 1 давления.Регулятор работает следующим образом.Для осуществления своих функцийрегулятор включается в общую систему автоматического управления гидротранспортной установкой или гидротранспортной системой земснаряда.При подаче сигнала от датчика 1 онарушении режима транспортированиявключается исполнительный механизмсистемы автоматической защиты (непоказан) и одновременно сигнал поступает на включение реле времени12 и элемента 11 сравнения и отнего на блок 10 управления, который открывает запорный орган - кран9, в результате чего воздух поступает во внутрь клапанной...
Система автоматического управления

Номер патента: 521551
Опубликовано: 15.07.1976
Автор: Морачевский
МПК: G05B 13/02
...в блоке 5 обратнойсвязи в сигнал ХюСигнал Х с выхода датчика скорости регулируемой координаты поступает на вход порогового устройства 7, которое вырабатывает30 сигнал отсутствия скорости регулируемой ко521551 Формула изобретения Составитель 10. Гладков Редактор Н. Коган Техред Л. Семенов Корректоры: В, Дод и А. Николаева1029Министро ий .,д,4/5 Изд.1547 осударственного по делам изо 113035, Москва, )Каказ 1792/1ЦНИИПИ Г ПодписноеСССР Тиркомитета Совет ретепий и открь 3 Рашская н ографня, пр. Сапунова, 2 ординаты, если текущее значение скорости регулируемой координаты не превышает некоторой пороговои величины - ос аточной скорости Лвых.о. На вход логического олока 8 постпают сигналы о наличии (или отсутствиями) сигна ла рассогласования...
Предыдущий патент: Устройство для определения динамических
Следующий патент: Устройство для регулирования двумерных параметрических полей; “чгчтно-т ••••д, -. есиа, . омблиотека баihuiv”—-. –
Случайный патент: Способ получения 8-оксихинолата меди