Способ управления резонансным роботом и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
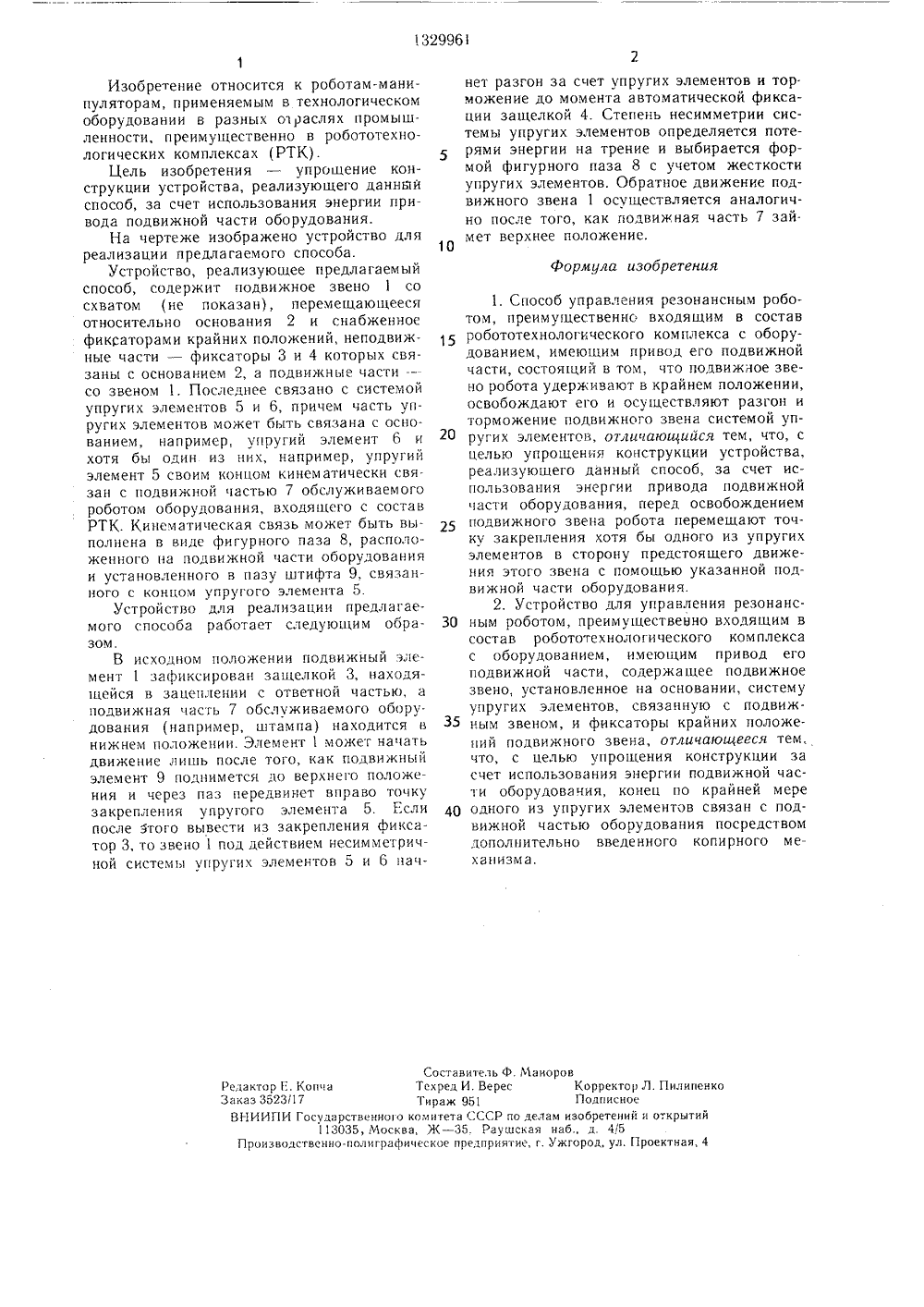
(19) 111) 961 5 1 900 ИСАНИЕ ИЗОБРЕТЕНИЯ О. Шейвехман СССР1984.Я РЕЗОНАНОЙСТВО ДЛЯ к роботам-ма технологичес отраслях про ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ К АВТОРСКОМУ СВИДЕТЕЛЬСТ(54) СПОСОБ УПРАВЛЕНСНЫМ РОБОТОМ И УСТРЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относитсянипуляторам, применяемымком оборудовании в разных мышлен ности, преимущественно в робототехнологических комплексах. Целью изобретения является упрощение конструкции устройства, реализующего способ за счет использования энергии привода подвижной части оборудования. Перед выведением из зацепления фиксатора 3 или 4, удерживающего подвижное звено 1 в крайнем положении, точку закрепления хотя бы одного из упругих элементов системы смещают в сторону, соответствующую предстоящему перемещению подвижного звена с помощью подвижной части 7 оборудования комплекса.2 с. п. ф-лы, 1 ил.1329961 Формула изобретения Составитель Ф. МаиоровРедактор В. Конча Техред И. Верее Корректор Л. ПилипенкоЗаказ 3523/17 Тираж 951 ПодписноеВИИИПИ Государственного комитета СССР по делам изобретений и открытий113035, Москва, Ж - 35. Раушская наб., д. 415Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 Изобретение относится к роботам-манипуляторам, применяемым в технологическом оборудовании в разных отраслях промышленности, преимущественно в робототехнологических комплексах (РТК).Цель изобретения - упрощение конструкции устройства, реализующего даннаи способ, за счет использования энергии привода подвижной части оборудования.На чертеже изображено устройство для реализации предлагаемого способа.Устройство, реализующее предлагаемый способ, содержит подвижное звено 1 со схватом (не показан), перемещающееся относительно основания 2 и снабженное фиксаторами крайних положений, неподвижные части - фиксаторы 3 и 4 которых связаны с основанием 2, а подвижные части со звеном 1. Последнее связано с системой упругих элементов 5 и 6, причем часть упругих элементов может быть связана с основанием, например, упругий элемент 6 и хотя бы один из них, например, упругий элемент 5 своим концом кинематически свя. зан с подвижной частью 7 обслуживаемого роботом оборудования, входящего с состав РТК. Кинематическая связь может быть вьь полнена в виде фигурного паза 8, расположенного на подвижной части оборудования и установленного в пазу штифта 9, связанного с концом упругого элемента 5.Устройство для реализации предлагаемого способа работает следующим образом.В исходном положении подвижный элемент 1 зафиксирован защелкой 3, находягцейся в зацеплении с ответной частьк, а подвижная часть 7 обслуживаемого оборудования (например, ц 1 тампа) находится в нижнем положении. Элемент 1 может начать движение лишь после того, как подвижный элемент 9 поднимется до верхнего положения и через паз передвинет вправо точку закрепления упругого элемента 5. Если после этого вывести из закрепления фиксатор 3, то звено 1 под действием несимметричной системы упругих элементов 5 и 6 начнет разгон за счет упругих элементов и тор.можение до момента автоматической фиксации защелкой 4. Степень несимметрии системы упругих элементов определяется потерями энергии на трение и выбирается формой фигурного паза 8 с учетом жесткости упругих элементов. Обратное движение подвижного звена 1 осуществляется аналогично после того, как подвижная часть 7 зай.10мет верхнее положение. 1. Способ управления резонансным роботом, преимущественно входящим в состав робототехнологического комплекса с оборудованием, имеющим привод его подвижной части, состоящий в том, что подвижное звено робота удерживают в крайнем положении, освобождают его и осуществляют разгон и торможение подвижного звена системой уп ругих элементов, отличающийся тем, что, сцелью упрощения конструкции устройства, реализующего данный способ, за счет использования энергии привода подвижной части оборудования, перед освобождением подвижного звена робота перемещают точку закрепления хотя бы одного из упругих элементов в сторону предстоящего движения этого звена с помощью указанной подвижной части оборудования.2. Устройство для управления резонанс- ЗО ным роботом, преимущественно входящим всостав робототехнологического комплекса с оборудованием, имеющим привод его подвижной части, содержащее подвижное звено, установленное на основании, систему упругих элементов, связанную с подвижЗ 5 ным звеном, и фиксаторы крайних положений подвижного звена, отличающееся тем., что, с целью упрощения конструкции за счет использования энергии подвижной части оборудования, конец по крайней мере 40 одного из упругих элементов связан с подвижной частью оборудования посредством дополнительно введенного копирного механизма.
СмотретьЗаявка
3995099, 24.12.1985
Т. С. Акинфиев и А. О. Шейвехман
АКИНФИЕВ ТЕОДОР САМУИЛОВИЧ, ШЕЙВЕХМАН АРКАДИЙ ОСИПОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: резонансным, роботом
Опубликовано: 15.08.1987
Код ссылки
<a href="https://patents.su/2-1329961-sposob-upravleniya-rezonansnym-robotom-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления резонансным роботом и устройство для его осуществления</a>
Устройство для поглощения энергии индуктивного элемента, коммутируемого в электрической цепи постоянного тока

Номер патента: 1755329
Опубликовано: 15.08.1992
Автор: Новиков
Метки: индуктивного, коммутируемого, поглощения, постоянного, цепи, электрической, элемента, энергии
...которая показана на схеме иявляется обратной. по отношению к проводящему направлению диода 4. Поэтому врассматриваемом режиме напряжение индуктивного элемента 3 прикладывается кдиоду 4 и токи в цепях устройства для поглощения энергии не протекают.После размыкания контакта 2 ток из егоцепи переходит в цепь диода 4 и дальшепротекает под действием напряжения (ЭДСсамоиндукции) индуктивного элемента 3.При этом его напряжение имеет полярность, противоположную той, которая показана на схеме.В первый момент времени после размыкания контакта 2 ток диода 4 протекает только в цепи конденсатора 9. При этом энергия, накопленная в индуктивном элементе 3, запасается в конденсаторе 9, его напряжение растет и имеет полярность, которая показана на...
Устройство для установки автосцепного оборудования на подвижном составе железныхдорог

Номер патента: 342800
Опубликовано: 01.01.1972
Авторы: Бернд, Германска, Иностранное, Иностранцы, Иоахим, Министериум, Роланд
МПК: B61G 9/20
Метки: автосцепного, железныхдорог, оборудования, подвижном, составе, установки
...1,Устройство состоит из розетки 1, укрепленной к буферному брусу 2, эвтосцепки 3, хвостовик которой шарнирно соединен с хомутом 4 при помощи валика б, опирающегося на 20поддерживающую плиту б, и поглощающегоаппарата 7, В розетке размещены упорныеклинья 8, зафиксированные предохранительными клиньями 9, образующими переднийупор. Поглощающий аппарат образован пружиной 10, размещенной в корпусе 11, передней плитой 12 и днищем 18. Хомут 4 связан споглощающим аппаратом при помощи хвостовика 14 и снабжен опорной поверхностью адля автосцепки. ЗО Монтаж автосцепного оборудования произ. водится следующим образом.Спереди, через розетку 1 вводится поглощающий аппарат 7 с хомутом 4, причем пружина 10 вводится в свободном состоянии, а хомут шарнирно...
Упругий фиксатор для подвижной детали с пазом

Номер патента: 911057
Опубликовано: 07.03.1982
Авторы: Гасман, Кецлах, Лейкин
МПК: F16B 1/02
Метки: детали, пазом, подвижной, упругий, фиксатор
...как при изготовлении,ии бтак и при эксплуатаные обоймы к . рото ые закреплены в . Рв-ся воэможность изменения, т.е. Регуспециально д ния координаты зафиксированной коло ке, Колодка установ- ся волена на рычаге подвижно, т.е. может 55 лирн .в оль ычага в любое го положения подвижнойсительно корпуса фиксатора без необположение рходимости демонтировать эту детальролика в несколько раз меньше див(или рычаг с роликом ) из фиксатора,метра нару жной обоймы подшипника.и о - дополнительно механически дообрабаВ виде указанной клиновидной форо обла ает расклини- тывать эту деталь или рычаг ивсле ствие которо- изготавлють заюн нее ыую одю деталь (или но )го еб лысая сила пружиныприжимаю- вижнущ ая через рычаг ролик к пазу, обесперыцаг ) в...
Пневматический упругий элемент транспортного средства

Номер патента: 1676841
Опубликовано: 15.09.1991
Авторы: Гвинерия, Десятников, Дзоценидзе
МПК: B60G 15/12, F16F 9/16
Метки: пневматический, средства, транспортного, упругий, элемент
...элемент транспортного средства работает следую, щим образом.В моменты времени, когда подвижное основание 1 достигает крайних положений и меняет направление движения, сигнал датчика 18, проходящий через фильтр 19, обращается в нуль и нуль-орган 20 выдает импульс, который через усилитель 21 подается на коммутирующее устройство 22. Подвоздействием этого сигнала устройство 22 , замыкает, цепь питания электромагнитов16, которые притягивают рычаги 15, и, пре, одолев сопротивление пружин 17, раздвигают секторные элементы 14. Так как втулки 11 имеют ходовую посадку с незначительным зазором, а секторные элементы 14 в свободном состоянии расположены заподлицо с поверхностью стенки втулки, то ход секторных элементов незначительный, что...
Цепь для поддержания гибких элементов, перемещаемых от неподвижного источника к подвижному потребителю

Номер патента: 1802858
Опубликовано: 15.03.1993
МПК: F16G 13/16
Метки: гибких, источника, неподвижного, перемещаемых, подвижному, поддержания, потребителю, цепь, элементов
...10, имеющие Т-образную форму и расположенные на некотором расстоянии друг от друга, которые взаимодействуют с профильным пазом 11 в пластинках 1, 2 цепи, имеющим ответную 5 10 15 форму,На каждой направляющей 10 отформован пружинящий фиксирующий язычок 12, 20входящий в сквозное отверстие 13 пластинки 1, 2, который может взаимодействовать сноском 14 фиксирующего кулачка 15 в от-фверстии 13.Концы полок 9 каждого ползуна 5 снабжены скосами 16, облегчающими скользящее перемещение.В форме выполнения по фиг 6 ползун 5на полке 9 имеет выступ 17, входящийвнутрь узкой стороны пластинки 1, 2 цепи, 30который служит для того, чтобы закрепитьзащитную полосу, которая может натягиваться сверху между траверсами 3, 4 и выступами 17. Выступы 17 служат...
Предыдущий патент: Двухкоординатный привод робота
Следующий патент: Модуль манипулятора
Случайный патент: Установка для обработки древесины защитными жидкостями