Устройство для транспортировки деревьев
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1530505
Автор: Мартынихин








Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК ПИСАНИЕ ИЗОБРЕТЕНИ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГКНТ СССР(72) В. Д. Ма рты ни хи н(54) УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ДЕРЕВЬЕВ(57) Изобретение относится к устройствамдля транспортировки деревьев. Целью изобретения является повышение производитель.ЯО, 1530505 А 1 с 5) 4 В 60 Р 340. 7,00, В 6 В 7/00 ности Устройство содержит несущии канат 1, протянутый между стационарными опорами 2 и 3, самоходное шасси 8 с гидроманипулятором 9, имеющим срезающее устройство 10. На несущем канате 1 закреплена каретка 5 с дугообразным элементом 6 для вершин деревьев пакета 7. На самоходном шасси 8 закреплен дугообразный элемент 13 для комлей деревьев и телескопическая стойка 15 с устройством 17 под несущий канат 1. Устройство 17 содержит направляющие ролики, один из которых закреплен с возможностью поворота в вертикальной по перечной плоскости. Дугообразные элементы 6 и 13 размещены в параллельных плоскостях. На шасси 8 закреплен самосвальный кузов 1 для размещения комлей деревьев, связанный с гидроцилиндром 12 его поворо- та. 4 3. п. ф-лы, 10 ил.г)зобретс ние относится к транспортному ма шиностроению, а конкретно к машинам лля трелевки и транспортировки древесины.Целью изобретения является повышение производительности.На фиг. 1 представлена обгцая схема установки при вертикальном размещении деревьев; нд фиг. 2 - то же, при горизонтальном размещении деревьев; на фиг. 3 - констрхкция Олоков нд стойке, вил сп, рели. Иа фиг. 4 - то же, вил сбоку; на фиг. 5 каретка с грузнесущим дугообразным элелентом лля вертика,ьно размесцениых леревьс в, вил сперсли; нд фиг. 6 - каретка с лугооб разным элементом лля вертикально рдзмепн нных леревьев, вил сверху; на фиг 7 схема трднспортировки пачки деревьев с исполь:)ванием стойки; на фиг. 8 - го же, без исполь)в;ния стойки, на фиг. 9 схсма снместной работы пакетирующей и грелевочной машин; нд фиг. 10 схема разгрхзки нд шгрузочном пунктеКдндчндя устдновкд состоит ( фиг.из несущего каната 1, натянутого межлу ста)шондрными опорамии 3, Несущий кандт ндтянхт при помощи полиспаста 4. В ПРОЛЕ)С МЕЖЛс ОПОРаМИ НЗХОДИТСЯ КДРЕТКД 5 с здкреплснным на ней грузонесущим дугосн)разным элементом 6, на которой наклоне), почги вертикально, опирается вершинная и;)счь пакета 7 деревьев при вс ртик;,ьно их рдзме)пении и ложатся )га элем нг 6, при горизонтальном рдзме)пении ,и ревьев (фиги 2)ВТОрон ОСИОННОЙ Чс)СТЬЮ ХСТН НОНКИ 5 ВЛя. с 1 я ндлоч но-пд кс ти рующая и трс левочна я с)мОх)нс)5 массс 1 8, котсрдя снабкси сс- рийны)1 Илр)ыс)нип ятором 9 со ср:здюшим механизмомри вертикдл,н.х разс пении лерс вьсв 4, )оор лованд сдлосв;.)ь ны м кх ) во м1 с .и дроп ри водо и х пр; в чс ния (фи.1, включающим гилп ии.1 иплры 12. 11, кх овд 11 выполнен, ндссчк и, во изосжднис скольжения ство,)о По лну при уклдлкс.Крсп,)снис луг)образного элемента 6 к кдрсгкс 5 п)дрнирное, нд вертикд,)ьшй рдспо,;о кениой ни. лопускдюп(ес и ворот еп в горизонт;Сп иои лоскости нд 9 в кд ж схк) ст)сронх при горизонтс) )ьи) м р; чс - пннии .(срсвьсв, 11 а .с)хохолном п)дсси 3;) крс п,)еи второй лх побразный э нчсн1311 ри г)ри )он тдльном рдзмещс и;и л гн вьсв л пи)брдзпыи элемент 13 размсщс н в )р тика,)ьг)й поперечной плоскости, пдр;), и )ь ИОИ )1, СК)с.1 И рс)ЗХ)С(ЕНИЯ Лу ,Г)рс) ) О элемент;) 6 ,фи 2.11 ри р гик;.) Иох рсзлеи(с иии,с рс. виси луги)бра ныи э.)емеит 13 рдзмсп(сн в п)ри ЗОНТа,)ЬИОИ П.Н)С и) ТИ ПДРс 1.1. Н, )Ьн)И П, )с) к)сти р мспссния лхгобрд ис) э,;си.), 1 )5 И).с)СКИ Нс НИЯ У,ШН.ННЫХ )Ч НС С-) К)1 ИТ)С) В),В)ЛНОИ ИЗ ССКСИИ Л. романипулятора 9 расположена гидравлическая лебедка, свободный конец каната которой пропущен через блок 14 и заканчивается чокером (фиг. 7.Самоходное шасси оборудовано телескопической стойкой 15, прикрепленной к его раме шарнирно лля перевода в транспортное положение гидроцилиндром, расположеньым под рамой шасси 8, которое может быть оборудовано отвалом 16.В верхней части стойки 15 расположеноустройство 17, включающее несущие ролики, предназначенные лля размещения между ними несущего каната 1, а также для соединения и отсоединения его от машины по 15 команде оператора.Это хстройство (фиг. 2 и 31 состоит изопорно)о ролика 18 и открывающегося ролика 19, закрепленного с возможностью поворота в вертикальной поперечной плоскости, боковые шеки которого при помощи 0 кронштейнов 20 установлены на шарнир 21.В свою очередь кронштейны 20 соединены при помощи тяги 22 с механизмом открытия-закрытия ролика 19, действующего от относительного смещения внутренней н на ружной частей телескопической стойки 15.:)тот мсханизм заключен в направляющую коробкх 23 и включает насаженные на нижний конец тяги 22 витую пружину 24, наконечник 25, тдрельчатые пружины 26, плашки 27, при)к)х,Немые к боковым стенкам ко- ЗО робки тарельчдгыми пружинами для создания определенной силы трения. Устройство снабжено ловителями каната в виде наклонных ребер 28. Приваренных к верхней части стойки.Каретка 15 с грузонесущим дугообраз нь)м элементом 6 состоит при вертикальномрд ме;пении леревьев из каркаса 29, ходов ььх ко,чес, и з кото ры х двд внутренних коле 3( р,) с по нжс ны несколько ниже наружных ко.)щ 31 и грузонесущего дугообразного элемента 6, выполненного в форме;об)с,) с открывающимися только внутрьсойкдми 32, предназначенными для предотвращения сползания деревьев с элемента 6, когда при ;знспортировке пакет находится во;изонтдльном положении. Расположе. Иие с:сов.;х ко.н; в каретке 5 выбрано из,)Г; к иий равномерной их загрузки при лвижении с ру;ом.У; ройстн); дб 1 отает следующим обра)м.Р,дботс:с лесосс к ведется вдоль несуПе)о;,гд 1 лиоо секторами без перестаов и го.ювной ; поры 2 и с перестановкой кос в,Й, либо полосами с перестановками кдк г лвной, так и тыловой опор 2 и 3.11 и ри и; По. н. ы определяется радиусом дей 1С 1 ИЯ ГИЛрп Лс )Гс Пус)ЯТОра С уЧЕтОМ ПОд.)с Кина.ИЯ, ЕОсЛКОЙ. ШИрИНа ПОЛОСЫ МО.ксг быть супсесчвенно увеличена за счет око.ь и-й ра ") я кк: при помощи которойканат отклоняется от прямолинейного направления в сторону. Установка таких временных растяжек производится впереди места работы. Вырубка леса на полосе или в секторе может производиться двояко: либо сразу на всей длине полосы до монтажа несущего каната 1, либо вначале монтируется несущий канат 1 в массиве леса и после этого производится постепенная валка леса впереди трелевочно-пакетирующей машины (фронтальный метод работы). При работе по второму методу касание несущего каната о деревья не имеет значения, так как в канатной системе установки нет подвижных канатов, а следовательно, практически нет и износа каната от трения о стволы деревьев.При работе устройства с вертикальным размещением деревьев (фиг, 1) несущий канатпропущен через направляющие блоки 18 и 19, расположенные на стойке 15, что необходимо для обеспечения поперечной устойчивости ВП ГМ. Среза нные валоч ны м аппаратом деревья укладываются гидро- манипулятором 9, с небольшим наклоном назад (примерно 5), одновременно в кузов1 на грузонесущий дугообразный элемент 6 каретки 5. При этом деревья торцами комлей врезаются в насечку дна кузова 11, сохраняя свое положение после погрузки. Погруженный пакет комли сжимают клещевым дугообразным элементом 13, после чего он транспортируется из лесного массива.Сбор и пакетирование пачки леса при горизонтальном размещении деревьев (фиг. 1) осуществляется треловочно-пакетирующей машиной при помощи гидроманипулятора 9. Деревья (хлысты) поштучно укладываются вершинами на дугообразный элемент 6 каретки 5, а комлями в дугообразный элемент 13. Удаленные от машины стволы и стволы неудобные для захвата гидроманипулятором 9 предварительно подтаскиваются при помощи лебедки, после чего погружаются гидроманипулятором 9. Пакетирование леса производится при поднятой стойке 15 и опирании несущего каната 1 при помощи устройства 17. Это необходимо для удержания каретки 5 на необходимой высоте, а также для лучшего обеспечения поперечной устойчивости машины. После сжатия комлевой части пачки в элементе 13 и перевода гидроманипулятора 9 в транспортное положение производится транспортировка леса к головной опоре. Транспортировка производится под несущим канатом с поднятой стойкой 15 и с опиранием на нее несущего каната(фиг. 4). При выходе на открытое пространство при транспортировке в вертикальном положении деревьев, если это диктуется обеспечением большей устойчивостью машины или при отсоединении от несущего каната 1, пакет 7 переводится из вертикального в горизонтальное положение путем наклона назад кузова 11 при помощи гидроцилиндров 12. При этом так же несколько опуска ется стойка 15. От давления вершин деревьев стойки 32 на элементе 6 поднимутся в 5 вертикальное положение и будут препятствовать сползанию деревьев с захвата.Разгрузка пакета на землю в этом случаевыполняется следующим образом. Опусканием стойки 15 и опрокидыванием кузова 11, каретка 5 с элементом 6 и вершиной частью пакета 7 опускается на землю. Далее, паКет стаскивается с элемента 6, предварительно зафиксированного соединением с анкерной опорой (пнем) на земле. После это.го несущий канат 1 освобождается из устрой. 5 ства 17 путем раздвижения стойки 15. Приэтом ролик 19 откроется, вращаясь относительно шарнира 21 при помощи тяги 22, на которую передается усилие от аппарата трения, заключенного в коробке 23 и состоящего из деталей 25 - 27. Пружина 24 срабатывает только при предельном раздвижении стойки, от деформации ее передастся сигнал оператору электрическим путем, одной из известных конструкций. После этого производится дальнейшая транспортировка пакета 25 его разворотом к месту штабелевки. Послечего освобождается дугообразный элемент 6 и пачка полностью опускается на землю, При транспортировке в горизонтальном положении деревьев практически вся нагрузка от пачки леса передается на самоходное шасЗ 0 си 8 и ее ходовую часть. При транспортировке без опирания несущего канатана стойку 15 последняя опускается или складывается в транспортное положение (фиг. 8) В этом случае Сопротивление движению машины с грузом определяется сопротивлеЗ 5 нием движению машины с комлевой частьюпачки 7 и сопротивлением движению каретки 5 по несущему канату 1. Однако этот случай транспортировки возможен при неболь.ших пролетах несущего каната 1 (короткие 40 лесосеки или при работе с промежуточнымиопорами). В случае (фиг. 6) при помощи пакетирующей машины формируются пачки с укладкой вершин деревьев (хлыстов) на каретку 5, а комлей на землю под углом к волоку. Стойка 15 применяется в случаях необ ходимости удержания каретки 5 в воздухе идля лучшего обеспечения устойчивости машины. Трелевочная машина, снабженная стойкой 15, предназначена для укладки комлей в дугообразный элемент 3 и для транспортировки леса на погрузочную площадку.Усилие для движения каретки 5 во всехслучаях передается через стволы деревьев; которые удерживаются на дугообразном элементе 6 силой трения. Перед разгрузкой несущий канат 1 освобождается. Освобожде ние несущего каната осуществляется путемподнятия верхней части стойки 5 механизмом телескопа по команде оператора. При этом от аппарата трения, заключенного вформула изобретения 1 О 15 20 25 ЗО 35 40 коробке 23, усилие передается через тягу 22 на кронштейны 20. В результате ролик 19 откроется, вращаясь относительно шарнира 2 . В коробке 23 сила трения создается прижатием плашек 27, насаженных на наконечник 25, к стенкам коробки при помощи тарельчатых пружин. В верхней части коробки предусмотрена установка предохранительнои пружины 24, деформация которой сигнализирует по электрической цепи о предельном выдвижении телескопа, во избежании поломки узла открывания. Сила трения выбрана с таким расчетом, чтобы ролик 19 не откры в ался от с луча й ны х колеба ни й несу ше. го ка ната 1. Открытие ролика 19 может произойти автоматически при подходе к опоре 2, если она выше стойки 14 и несущий канат 1 на ролике 9 получит обратный перегиб. Открытие произойдет от давления несущего каната 1, когда оно достигнет установленной величины.Далее трелевочно-пакетируюшая машина (фиг 10) разворачивается перпендикулярно к несущему канату 1. При этом происходит поворот на 90 дугообразного элемента 6 относительно каркаса каретки 5, который после этого крепится за анкер, находящийся на земле. Повернутый таким образом пакет 7 стаскивается с дугообразного элемента 6 при дальнейшем движении машины и затем опускается на землю при открытии дугообразного элемента 13. Разгрузка пакета 7 может производиться на обе стороны от несущего каната 1. Древесина, доставленная на погрузочную плошадку, расположена удобно для последующей погрузки в транспортные средства. После завершения разгрузки трелевочно-пакетируюшая машина возвращается к месту нового формирования пачки на лесосеке. Все операции выполняются в обратном порядке, а именно, происходит разворот машины, присоединение к сцепному прибору машины каретки 5 при помощи отрезка каната и дви. жение машины на лесосеку под несущим ка. натом . По достижении места, где прове несущего каната достигает уровня стойки 15, осуществляется захват несущего каната 1 устройством 17. После попадания каната 1 в пространство между ребрами 28 ловителя и укладку на ролик 18, стойка 15 опускает. ся и ролик 19 закрывается. 1. Устройство для транспортировки деревьев, содержащее протянутый между стационарными опорами несущий канат, самоходное шасси с закрепленной на нем изменяемой по высоте стойкой, смонтированные на ней направляющие ролики для размещения между ними несущего каната, один из которых закреплен на стойке с возможностью поворота в вертикальной поперечной плоскости, и приспособление для подтаскива ния деревьев, отличающееся тем, что, с целью повышения производительности, оно снабжено двумя дугообразными элементами для охвата комлей и вершин деревьев, первый из которых закреплен на шасси, а второй - на каретке, которая установлена подвижно на несущем канате, при этом приспособление для подтаскивания представляет собой манипулятор.2. Устройство по п. 1, отличающееся тем, что дугообразные элементы размещены в вертикальных поперечных плоскостях.3. Устройство по п, 2, отличающееся тем, что второй дугообразный элемент закреплен на каретке с возможностью поворота в горизонтальной плоскости на шарнире с вертикально расположенной осью.4. Устройство по п, 1, отличающееся тем, что дугообразные элементы размещены в горизонтальных плоскостях.5. Устройство по пп, 1 и 4, отличающееся тем, что на шасси закреплен самосвальный кузов для размещения в нем комлей дере вье в.1530505 Фиг. /О Составитедь Т. ТереТехред И. ВерееТираж 522 нки едактор В. Бугренковаказ 7847,20НИИПИ Государстве1303 эПроизводственно-изд ного комитета по и Москва, Ж - 35 тельский комбинатбретениРау гисГ 1 а тент Корректор О. КраниоваПодписноеч и открытиям при ГКНТ С(я на б., д 415г. Ужгород, уп. Гагарина,
СмотретьЗаявка
4333374, 26.11.1987
БЕЛОРУССКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ИМ. С. М. КИРОВА
МАРТЫНИХИН ВАСИЛИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B60P 3/41, B60P 7/00, B61B 7/00
Метки: деревьев, транспортировки
Опубликовано: 23.12.1989
Код ссылки
<a href="https://patents.su/9-1530505-ustrojjstvo-dlya-transportirovki-derevev.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для транспортировки деревьев</a>
Способ измерения спектров отражения веществ с помощью жидкостных оптических элементов нарушенного полного внутреннего отражения (нпво)

Номер патента: 1121589
Опубликовано: 30.10.1984
Авторы: Зазворко, Карабегов, Маилов, Мамедов, Сайдов, Юдович
МПК: G01J 3/02
Метки: веществ, внутреннего, жидкостных, нарушенного, нпво, оптических, отражения, полного, помощью, спектров, элементов
...ВПВО,а угол падения света на образец задают изменением угла скоса торцовых 45граней вкладыша элемента НПВО.На фиг. 1 приведена конструкцияэлемента НПВО и ход лучей в моментпроведения измерений; на фиг. 2спектр НПВО водного раствора эозина; 50на фиг. 3 - спектр НПВО водного раствора метиленового Голубого,Элемент НПВО, с помощью которогореализуется данный способ представляет собой прямоугольную кювету 1, 55разделенную с помощью плоскопарал.чевьной разделительной пластины 2: з ля части, одна из которых заполняется исследуемой жидкостью 3,а другая - жидкостью, играющей рольэлемента НПВО 4. Вкладыш 5, придающий жидкостному элементу НПВО формумодифицированной призмы Дове, выполнен съемным или снабжен механизмомперемещения, что позволяет...
Соединительный элемент для трубчатых лесов

Номер патента: 83170
Опубликовано: 01.01.1950
Метки: лесов, соединительный, трубчатых, элемент
...пдкгдлкг ) н 1 трубь 1 -г и -1.г тооы т 02 4 г Оквдтыдлс, срс.ис 151 ст 1 О и прутка снд)сцць. кОВ 1, д труба 4 )деодгдлс, Оы )сиз нижними 1 ст 5 м цу здтсм иу)кцо накинуть г)изныв пакелк ) ид з)сОй кп кан закрепить сосзицигслиый элемент тремя-четырьмя гпп)р.ля прелпрежзсция сд)опроиз 30 Л ного соскдкивдция г цаклдлки 2 с грутка после;цяя и части, прлсдю 1 сй к тру)с 4 цеид изогимтой по рг;и 3 см т)мг)ь.В соб)2 цноъ В 1 зс 0 гкизн51 нд клд ткд ) и 301 иутой ч Об)лсэаст рубу -1, что преп 5 тст 3 ует с.,Ои)ОНА 3)Льно.5 у откизцой цаклазкп ) с прутка 1.П)и зеонтажс, Отверты 3251 цд тГ)СВОГ)ОЖЗЯ ЮТ Г)ТКИЗЦ 10 ИЯ КЛ 5 К , иоа)итет по ДелсО иаобетеии о(крГи ири Е:сВете )51.Пиетров иславский Те):и р(д. Л. Л. Камышикова 1)орр, Черкасоа М,...
Узел крепления элемента насыщения к судовой несущей конструкции и способ крепления элемента насыщения к судовой несущей конструкции
Номер патента: 1073149
Опубликовано: 15.02.1984
Авторы: Журавлев, Розов, Стопницкий, Энглин
МПК: B63B 5/24
Метки: конструкции, крепления, насыщения, несущей, судовой, узел, элемента
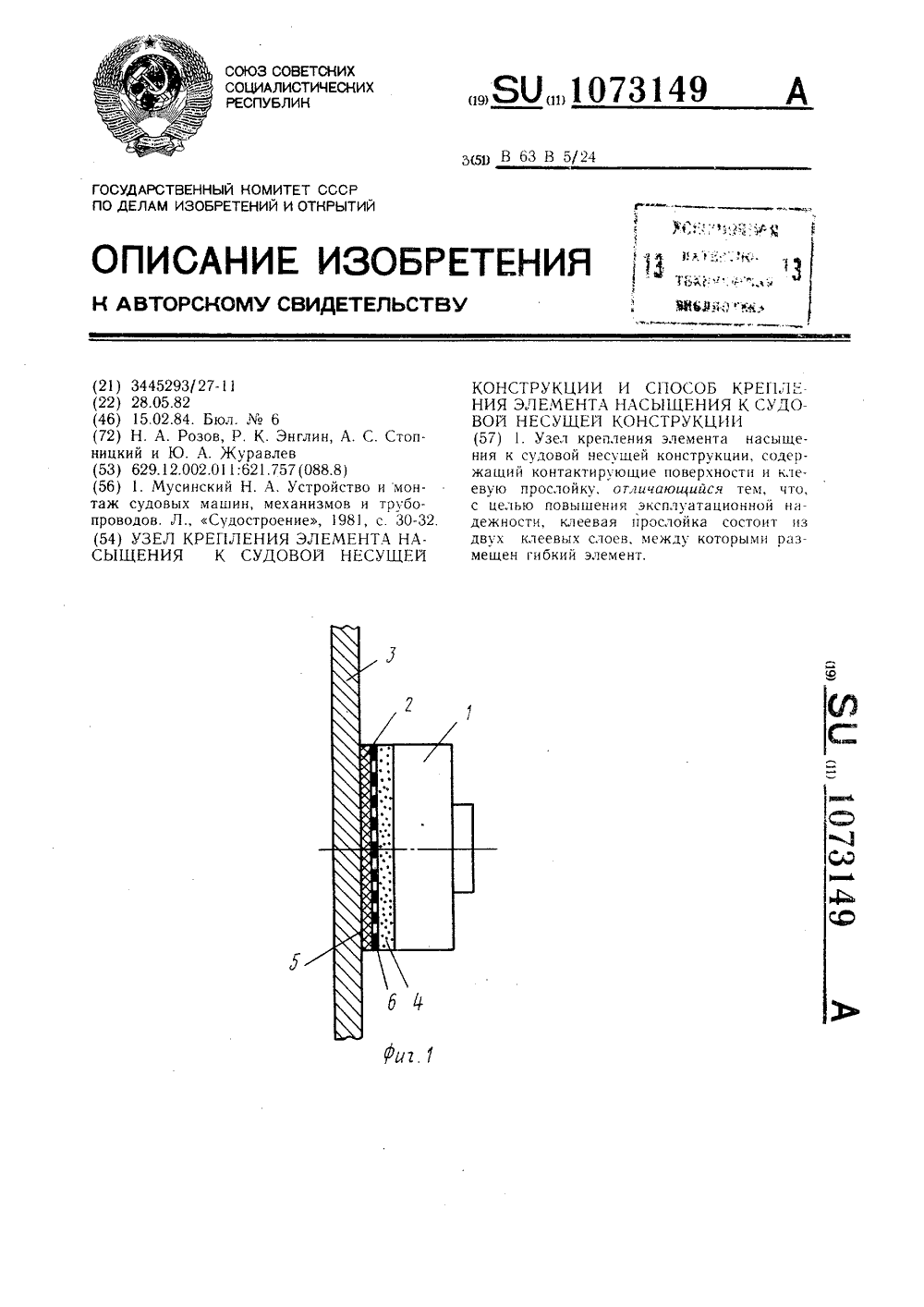
...состава,м.с, ч.Форполимер СКУ-ДФ(содержание диамина304 - 35/о) 22 5и имеет толщину 1 5 мм, а сло 1 пконтактирующий с несущей конструкциеи,выполнен из клея с относительным удлинением 2-50 о/о и имеет толгцину 0 1-0,2 мм.При этом гибкий элемент выголнен мозаичным из фольги.Причем согласно способу крепления элемента насыщения к судовой несущей конструкции, при котором на контактирующиеповерхносги наносят клей прижимают элемент к несущей конструкции и о-всрждаютклей, клей наносят в два слоя, между кото рыми размещают гибкий элемент при этомнанесение и отверждение клеевого слоя между эоементом насыщения и гибким элементом производят до . нанесения и отверждения клеевого слоя между гибким элементом и несущей конструкцией.На фиг. 1...
Комбинированный химически стойкий строительный элемент

Номер патента: 779537
Опубликовано: 15.11.1980
Авторы: Давыдов, Жиров, Носарев
МПК: E04C 3/00
Метки: комбинированный, стойкий, строительный, химически, элемент
...арматурой, при этом низкодеформативный вкладыш и продольная рабочая арматура выполнена в виде гнутых стал, Я ных профилей-обойм, а к боковым гра-ням профилей жестко присоединена поперечная рабочая арматура, выполненная в виде плоских каркасов.Гнутые стальные профили-обоймы вы полнены в виде тонкостенных коробовс защемляюще-связевыми каркасами по открытой грани, а древополимербетонный блок-сердечник выполнен в виде решетчатого дощатого короба-каркаса, 2 внутри которого расположен сверхлегкий полимербетон.На фиг. 1 изображен балочный строительный элемент; на фиг. 2 - строи- .тельный элемент типа колонна; на 30 фиг. 3 - разрез А-А на фиг. 1; на"Патентф, роектная,4 Филиал ППП г.ужгород,ул Ф фиг. 4 - разрез Б-Б на фиг.,1; нафиг. 5- разрез В-В...
Несущий элемент для конвейерной ленты двухленточного конвейера

Номер патента: 1052153
Опубликовано: 30.10.1983
МПК: B65G 21/00
Метки: двухленточного, конвейера, конвейерной, ленты, несущий, элемент
...размещенияв них соединительных элементов и перемычку, последняя образует с верно расположенного винта с глотай" ной головкой,4. Элемент по пп. 2 и 3, о тл и ч а ю щ и й с я тем, что перемычка выполнена с пазами, с возможностью размещения в них соединительных элементов.5. Элемент по .пп. 1-4, о т л ич а ю щ и й с я тем, что,вертикаль-. ные стенки в местах их соединения с кромочными.планками выполнены с пазами с возможностью размещения в ннх соединительных элементов. 3тикальными стенками верхнюю и нижнюю выемки, при этом вертикальные.стенки продольных пазов выполненыза одно целое с перемычкой,Боковые стенки снабжены расположеннымн перпендикулярйо им кро"мочньэе планками.Несущий, элемент снабжен направляющей, расположеииой на...
Предыдущий патент: Устройство электроснабжения железной дороги постоянного тока
Следующий патент: Устройство для закрепления длинномерных грузов на транспортном средстве
Случайный патент: Многопуансонное устройство для создания сверхвысокого давления