Способ управления асинхронным электродвигателем и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1443110
Автор: Мищенко








Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 801443110 2 Р 534 ОСУДАРСТВЕКНЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ЭОБРЕТЕНИЯ ИСА(56) Авторское свидетельство 11 у 782114, кл. Н 02 Р 7/42, 1Ковач К.П. и др. Переходихсы в машинах переменного ток Л,: Государственное электрот кое изд-во, 1963, с, 744,Авторское свидетельство С У 1185526, И,11,84,СС 78 де Т;-Ь тромагремени,эл наяная пост е процес М, -уктивность ротора; заичная индуктивно хничес статора и ротора;2- число пар полюсМ - начальная величио Фа мо та,пропорциональн величине входи ной(54) СПОСОБ УПРАВЛЕНИЯ АСИНХРОННИМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУИЕСТВЛЕНИЯ(57) 1. Способ управления асинхронным электродвигателем, при котором измеряют частоту вращения ротора асинхронного электродвигателя, формируют величину частоты тока статора суммированием частоты вращения ротора с дополнительной частотой Ды, а величину тока статорарегулируют в функции требуемого момента М , при этом в установившемся режиме работы Дю=В,/Ь иГМ , о т л и ч а ю щ и й с я тем, что, с целью повышения быстродействия и точности управления и увеличения среднего момента асинхронного элек тродвига теля з а счет поддержания режима постоянства сдвига фаз тока стао тора и потокосцепления ротора на +45 в переходных режимах,при скачкообразном законе изменения требуемого момента М формируют величину тока статораи дополнительнув частоту ДЫ по зао воздейс ия 2, Устройство по п. 1, содержащее блок задания момента, формирователь управляющих воздействий с выходами заданий величины и частотл тока стайщщай тора, формирователь фазных задающих сигналов тока статора, силовой преоб разователь тока и датчик скорости вра щения, установленный на валу асина- ф ронно го двиг а теля и подключенный к первому входу формирователя управляю- щщйф щих воздействий, второй вход которо- (, го подключен к выходу блока задания момента, выходы заданий величины и частоты тока статора формирователя управляющих воздействий подключены ф к входам формирователя фазных задаю ввв 3 ь, щих сигналов тока статора, связанного выходами с входами управления силового преобразователя тока, выходы которого подключены к статорным обмоткам асинхронного двигателя, при этом фор-, мирователь управляющих воздействий выон АВТОРСКОМУ СВИ1443110 Изобретение относится к электротехнике, в частности к регулируемому электроприводу переменного тока, и может быть использовано для управления моментом, регулирования скорости и отработки перемещения рабочих органов промышленных роботов, станков и других машин и механизмов, оснащенных асинхронными двигателями с короткоэамкнутым ротором. ОЦель изобретения - повышение быстродействия и точности управления, увеличение среднего момента асинхронного электродвигателя эа счет поддержания режима постоянства сдвига фаз 15 тока статора и потокосцепления ротора на +45 О в переходных режимах, а также улучшение энергетических показа.телей. 20На фиг, 1 представлена структУРная схема моментного асинхронного электропривода; иа Фиг. 2 - структурная схема форМирователя управляющих воздействий; на фиг. 3 - векторная диаграмма, поясняющая способ управления.Устройство для управления асинхронньм электродвигателем содержит блок 1 задания момента (фиг, 1), формирователь 2 управляющих воздействий30 с вьиодом 3 задания величины тока статора,и с выходом 4 задания частоты тока статора, формирователь 5 фазньи задающих сигналов тока статора, сиФормирователь 2 управляющих воздействий содержит апериодическое звено 14 (фиг. 2), первый 15 и второй 16 элементы деления и сумматор 17, первый вход которого образует вход 9 формирователя 2 управляющих воздействий. Выход сумматора 17 образует вьиод 4 задания частоты формирователя 2 управляющих воздействий. Второй вход сумматора 17 подключен к выходу первого элемента 15 деления, Вход делимого второго элемента 16 деления образует вход 10 формирователя 2 управляющих воздействий. Выход второго полнен в виде апериодического звена,двух элементов деления и сумматора,первый вход и выход которого образуют соответственно первый вход и выходзадания частоты формирователя управляющих воздействий, второй вход сумматора подключен к выходу первогоэлемента деления, причем вход делимого второго элемента деления образуетвторой вход формирователя управляющихвоздействий, выход второго элементаделения связан с выходом задания величины тока статора формирователя управляющих воздействий и подключен квходу делимого первого элемента деления, входы делителей обоих элементов деления объединены между собой и подключены к выходу апериодического звена, о т л и ч а ю щ е е с я тем,что, с целью улучшения энергетическихпоказателей за счет уменьшения потерьв асинхронном двигателе, в формирователь управляющих воздействий введенэлемент пропорционального преобразования с коэффициентом Г 2, вход которогоподключен к выходу второго элементаделения, а выход образует вьиод задания величины тока статора формирователя управляющих воздействий, при этомвход апериодического звена подключенк выходу второго элемента деления. ловой преобразователь 6 тока и датчик7 скорости вращения, установленныйна валу асинхронного электродвигателя 8 с короткозамкнутым ротором и подключенный к входу 9 формирователя 2управляющих воздействий, вход 10 которого подключен к выходу блока 1 задания момента. Выходы 3 и 4 заданийвеличины и частоты тока статора соответственно формирователя 2 управляющих воздействий подключены к входамформирователя 5 Фазных задающих сигналов тока статора, связанного выходами через регуляторы 1-13 мгновенныхфазных токов с входами управлениясилового преобразователя 6 тока, выходы которого подключены к статорнымобмоткам асинхронного электродвигателя 8.з 14431элемента 16 деления подключен к элементу 18 пропорционального преобразования, выход которого образует выход 3 задания величины тока статораформирователя 2 управляющих воздействий. Выход второго элемента 16 деления подключен также к входу аперио%дического звена 14, выход которогоподключен к объединенным между собой10входам делителей элементов 15 и 16деления. К выходу сумматора 17 подключен релейный элемент 19,Устройство работает следующим образом.15Входное воздействие электропривода с выхода блока 1 задания моментапоступает на вход 10 формирователя2 унравляющих воздействий. ВеличинаФвходного воздействия электроприводапропорциональна величине требуемогомомента М,В формирователе 2 управляющих воздействий формируются задающие сигналы величины тока статораи частоты 25тока статора ы; которые поступают свыходов 3 и 4 соответственно на соответствующие входы формирователя 5фазных задающих сигналов тока статоРа "ь ф вЬ 15, котоРые подаются 30на входы регуляторов 11-13 мгновенныхфазных токов и практически безынерци. онно отрабатываются силовым преобразователем 6 тока, например транзистор-ным импульсным инвертором, с помощьюотрицательных обратных связей по мгновенным фазным токам, подаваемым с выходов силового преобразователя 6 токана входы регуляторов 11-13 мгновенныхфазных токов. В результате переключения ключевых элементов силового пре. образователя 6 тока в статорных обмотках асинхронного электродвигателя 8фазные токи изменяются в соответствиис заданными величинами мгновенной амплитуды и мгновенной частоты в зависимости от входного воздействия Ми измеренной частоты вращения ротора ы, величина которой измеряется спомощью датчика 7. скорости вращения.Для обеспечения безынерционногоуправления моментом двигателя М в со 1ответствии с требуемым моментом Мпропорциональным величине входноговоздействия т,е. для обеспечения равенства М=М , необходимо обеспечитьуправление мгновенной амплитудой фазных токов статора з и мгновеннойчастотой фазных токов статора ы, пригде ы - угловая скорость вращения координат, равная угловой частоте потокосцепления рото-ра;ы - угловая скорость (частота)вращения ротора;ДЫ - дополнительная частота, равная скольжению потокосцепления ротора относительно ротора.Скольжение потокосцепления роторады(фиг, 3) равно скорости измененияугла между вектором потокосцепленияайагротораи осью ротора (Лш= - -),Г асПри соблюдении условия (1) известные дифференциальные уравнения, опре"деляющие связь между модулем векторапотокосцепления ротора, ортогональными составляющими вектора 7 з,ди моментом двигателя, имеют вид йм О, (3)г1Согласно векторной диаграмме (фиг. 3) змв Я 1 пЕ,соз Еч(5) 10 4котором фаза тока статора 1 пространственный угол вектора тока статораь) и фаза потокосцепления ротора(пространственный угол вектора потоко"сцепления ротора Ф,) должны бытьсдвинуты на угол, который либо под"держивается постоянным в направлении,определяемом направлением требуемогомомента, либо связанно изменяется приизменении требуемого момента М позакону, определяемому критериями качества асинхронного электропривода.Закон управления при безыинерционном управлении моментом в динамикеопределяется из дифференциальных уравнений роторной цепи, выраженных черезортогональные составляющие вектора тока статора в системе координат х, у,ориентированной относительно векторапотокосцепления ротора у,Условия ориентирования имеют вид:(7) 25 Статический коэффициент передачи по,моменту для заданной квадратичной.2величины тока статора 5 с учетом (6 ) и ( 7) зависит от угла Е , фаэово го сдвига тока статора относительно потокосцепления ротораК .= - 7 рсоя ЕяпГ,р., (8)3 1.м 1 2 р у,Иэ (8,) следует, что для обеспечения максимума момента при заданной величине тока статора необходимо управлять фазой тока статора с фазовым сдвигом относительно фазы потокосцепления ротора, удовлетворяющим усло- вию а ( соя Ес я хп Ец) ае Из уравнения (9) с учетом ориентирования (1), согласно справедливо условие:(9) 45 условий которым соя Еу О, (10)следует оптимальный закон управления50асинхронным двигателем по максимумумоментац 11 4 Знак "+" в выражении (11) соответствует положительному направлению момента двигателя. 5 1443Угол Е в уравнениях (5) и на век- торной диаграмме (фиг, 3) составлен между пространственным вектором тока статора х, и пространственным вектором потокосцеплеиия ротора М и характеризует сдвиг фаз тока статора и потокосцепления ротора для каждой иэ фаз а, Ь, с асинхронного двигателя.10Иэ дифференциального уравнения (2) с учетом (5) получают передаточную функцию для модуля вектора потокосцепления ротора110 Следствием оптимального закона управления (1 ) является равенство величин ортогональных составляющих проекций вектора тока статорапри ориентации по вектору потокоспепления ротора(13) где с 5 - фаза тока статора;угловое положение ротора;Ч - фазовый сдвиг потокосцепления ротора относительно осиротора.Так как угол сдвига между фазамии р постоянен по величине согласае но закону управления (11) и -- =0ЧаС х то при оптимальном управлении по закону (11) частота тока статора равначастоте потокосцепления ротора, втом числе и в динамических режимахизменения момента:(14) а 5 а 5где ы 5== --- мгновенная частойс ас та тока статора и потокосцепления ротора;угловая частота вращения ротора;Вм - дополнительная частота илискольжение потокосцепленияротора, характеризующее скорость относительного вращения вектора потокосцепленияротора относительно ротора.Скольжение тока статора и потокосцепление ротора в режиме управления Проекция вектора тока статора5 у не изменяет своего знака при изменении направления момента и характеризует потокообразующую составляющую тока статора, равную проекции вектора тока статора на ась, направление которой совпадает с вектором потокосцепления ротора.Ортогональная к этой оси составляющая тока статора 1 характеризует9 хмоментообраэующую составляющую тока статора, знак которой определяется направлением момента,Согласно векторной диаграмме (фиг. 3) угловая частота вращения вектора тока статора относительно оси статора(11) одинаковы, в связи с чем режимоптимального управления фазой токастатора (11) может быть реализованпри управлении в полярных координатах 5путем изменения модуля вектора токастатора (мгновенной амплитуды токастатора) и аргумента вектора токастатора (фазы тока статора). Фаза тока статора Е Формируется с помощьв 10формирователя 5 Фазных эадавщих сигналов тока статора Ь - с иотрабатывается силовым преобразователем 6 тока с помощьв отрицательныхобратных связей по мгновенным Фазным токам и регуляторов 11-13 мгновенных фазных токов Для исключения обратной связи по положению ротора Л в моментном асинхронном электроприводе (Фиг, 1) используется управление частотой тока 25 статора как суммы измеренной скорости вращения ротора о.(с помощью датчика 7 скорости вращения, например с помощьв тахогенератора) и дополнительной частоты йы, равной скольжению тока 30 статора и потокосцепления ротора, с последующим преобразованием сигнала задания частоты тока ыэ в сигнал задания Фазы тока статора Еэ = и(1)йС.При оптимальном законе управления (11) дополнительная частота ды определяется согласно уравнению (3 ) пропорционально отношению моментообразующей составляющей тока статора к величине потокосцепления ротора, 40 равной модулю вектора потокосцепления ротора ч:(15)т 4 р45При изменении момента М в режиме (11) в Функции момента изменяются как амплитуда тока статора з, так и амплитуда потокосцепления р в связи с тем, что согласно уравнениям (5)50 Согласно уравнению (6) величина потокосцепления ротора у (1) изменя ется с запаздыванием по отношению киэмененив величины тока статора 1.Постоянная времени апериодическогопроцесса изменения величины потоко"сцепления ротора равна электромагнитной посто 1 лной времени ротора Т , всвязи с чем через время Т4 Т послеизменения момента величина потокосцепления ротора достигает своего установившегося значения, определяемогов Функции момента согласно уравнениям (2), (4), (16) и (17); где , - установившееся значение величины потокосцепления ротора, равной модулю вектора потокосцепления ротора.Установившееся значение величины тока статора определяется установившейся величиной потокосцепления ротора согласно уравнениям (2) и (16): Переходный процесс изменения ве- личины потокосцепления ротора из одного установившегося значения 4 в другое установившееся значение Ч вызывает необходимость для выполнения закона (111 формироваты . связанные переходные процессы изменения величины тока статора и дополнительной частоты ды в Функции текущей величины потокосцепления ротора(т,).Из уравнений (4) и (17) следует уравнение, связывающее процессы изменения мгновенных амплитуд тока статора и потокосцепления ротора в функции времени при изменении момента двигателя в режиме управления по закону (11):(т,)=Гг в ." --- , (20)32 р 4 1а из уравнений (15) и (17) следует уравнение связи процессов изменения скольжения тока статора (дополнительной частоты Л) и мгновенной амплиту" ды потокосцепления ротора(21)Процессы управления током статора по предлагаемому способу описыва" ются уравнениями (20), (14) и (21) и определяют процессы выполнения вза(27) 40 4) е мгновенной ча тотои помощ правл осуществляется с17, на первый вхоает сигнал с выхвращения (нап ка статора сумматора рого поступ ка 7 скорости9 котода датчиимер, вы(26 имосвязанных действий над двигателем путем изменения величины и частоты тока статора при изменении входного воздействия моментного электропривода М (С)=М(С)./ 5Для исключения информации о величине сложно измеряемого потокосцепления ротора используют решение дифференциального уравнения (2) при ус ловии выполнения закона оптимального управления (11) и его следствия - равенства моментообразунвцей и потокообразующих составляющих тока статоРа х= 1 у 11 з/Г 2,15 Из уравнений (16) и (20) следует, что при управлении по закону (11) потокообразующая составляющая тока статора, равная проекции вектора то- Ю ка статораз на ось вектора цотокосцепления ротора р, определяется отношением величины момента двигателя к текущей величине потокосцепления ротора У(С ):25ее егь, м(с)(22)ЗЕрЬ, 4,.7 С) Требуемая связь величины потоко.сцепления ротора 1 и величины момен та двигателя М, пропорциональной входному воздействию, определяется подстановкой выражения для потокообразующей составляющей тока статора зу в правую часть дифференциального уравнения (2): откуда с учетом равенстваЙ 1(С) 1 Йр (С)., (С):ф" 2 Ж получают дифференциальное уравнение для квадратичной величины потокосцепления ротора при изменении момента в режиме управления по закону (11)а(С)----- + у(С)= -. - ": М(;С). (25)При скачке момента двигателя от начального значения М до конечного значения М квадратичная величина потокосцепления ротора изменяется по закону, определяемому решением дифференциального уравнения (25):2 й 1(С)=- М+(М-М)ег 3,где М ., - начальное значение моментаь"при установившейся начальной величине потокосцепления ротора, определяемой условием установившегося режима (8).Как следует из уравнения (26), в режиме управления по закону (11) переходный процесс изменения величины потокосцепления ротора происходит в два раза быстрее, чем следует непосредственно из уравнения (2 ), что обеспечивается резкой форсировкой величины тока статора и потокообразующей составляющей тока статора в начальный период времени после скачка момента согласно уравнениям (20) и (22) с последующим быстрым ослаблением форсиров. ки по мере нарастания потокосцепления ротора до нового установившегося значения. Это обеспечивает инвариантное управление моментом независимо от текущих величин потокосцепления ротора и тока статора в переходном процессе формирования оптимального уровня величины потокосцепления ротора.Подставляя закон изменения величины потокосцепления ротора из уравнения (26) в уравнения (20) и (21), получают законы инвариантного управления моментом при оптимальном по максимуму моменте управления потокосцеплением ротора для систем с фазо-частотно-токовым управлением, исходя из условия инвариантности момента М(С)=М(С): Способ управления величиной тока статора 1 Б(С) в зависимости от вход го воздействия реализуется для случая одной полярности задания по моменту с помощью второго элемента 16 деления, апериодического звена 14, элемента пропорционального преобразования 18 и описанных связей между ними.ходное напряжение тахогенератора),который пропорционален частоте вращения ротора о, На второй вход сумматора 17 поступает выходной сигнал первого элемента 15 деления, с помощьюкоторого осуществляют управление дополнительной частотойды, равнойскольжению тока статора и потокосцепления ротора относительно ротора с 10заданным соотношением коэффициентовделимого и делителя для первого элемента 15 деления,Входные сигналы и выходной сигналсумматора 17 могут принимать как по 5ложительные, так и отрицательные значения, направление вращения векторовтока статора и потокосцепления роторазадают в зависимости от знака выходного сигнала сумматора 17 с помощьюрелейного элемента 19, выходной сигнал которого "0" нли определяетнаправление вращения вектора з, который формируется с помощью формирователя 5 фазных задающих сигналов токастатора в зависимости от сигнала задания мгновенной амплитуды тока статора 3., поступающего с выхода 3,который образован элементом 18 пропорционального преобразования, и взависимости от сигнала задания мгновенной частоты тока статора ы , поступающего с выхода 4, который образован выходом сумматора 17,При изменении входного воздействия моментного электропривода, поступающего с выхода блока 1 задания момента, с помощью формирователя 2 управляющих воздействий задают величину и частоту тока статора.,Иуска Блан рре едак Тираж 584 Государственного комитета ССелам изобретений и открытий сква, Ж"35, Раушская наб., д 92/51 ВНИИПИ по 113035, Подписи Зака оизводственно-полиграфическое предприятие, г. Ужгород, ул, Проектная, 4
СмотретьЗаявка
3371816, 16.12.1981
ПРЕДПРИЯТИЕ ПЯ Р-6930
МИЩЕНКО ВЛАДИСЛАВ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: H02P 5/34
Метки: асинхронным, электродвигателем
Опубликовано: 07.12.1988
Код ссылки
<a href="https://patents.su/8-1443110-sposob-upravleniya-asinkhronnym-ehlektrodvigatelem-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления асинхронным электродвигателем и устройство для его осуществления</a>
Программируемый формирователь управляющих воздействий микропроцессорной системы
Номер патента: 1725210
Опубликовано: 07.04.1992
Метки: воздействий, микропроцессорной, программируемый, системы, управляющих, формирователь
...запускается сигналом с выхода триггера 62, который устанавливается по переднему фронту тактовой частоты при подаче сигнала "Пуск" по входу 17. Высокий уровень напряжения с прямого выхода триггера 62 поступает на С-вход триггера 61 защелки и разрешает прохождение на счетчик 29 "Тактовой частоты счетчика" с входа 15.С этого момента счетчик 29 начинает отсчитывать импульсы тактовой частоты, а выходы первой секции счетчика 29 поступают на схему 4 сравнения (фиг.9),В момент подачи сигнала "Пуск" счетчик 40 адреса обнулен. Выходы его через коммутатор 45 подключены к адресной шине запоминающего устройства 3, поскольку нет обращения к запоминающему устройству 3 по параллельной записи и чтению. По той же причине сигналы 33, 37, 38 находятся...
Формирователь управляющих импульсов

Номер патента: 1714767
Опубликовано: 23.02.1992
Авторы: Калиниченко, Сенько
МПК: H02M 1/08
Метки: импульсов, управляющих, формирователь
...к крайним зажимам вторичной обмотки импульсного трансформатора 2, средний вывод которой подключен через первый транзистор 9 к среднему выводу первичной обмотки первого выходного трансформатора 3 и через второй транзистор 10 - к среднему выводу первичной обмотки второго выходного трансформатора 4, первый выпрямитель 11, подключенный к вторичной обмотке первого выходного трансформатора 3, ограничительный резистор 12, включенный между положительным выходом первого выпрямителя 11 и первой выходной клеммой 13 формирователя, второй выпрямитель 14, подключенный к вторичной обмотке второго выходного трансформатора 4, положительный выход которого подключен к второй выходной клемме 15 формирователя, управляющий триггер Шмидта 16, прямой выход...
Устройство для сборки магнитопровода со статором-ротором

Номер патента: 1640791
Опубликовано: 07.04.1991
Авторы: Басин, Браниш, Олейник, Параскевич
МПК: H02K 15/00
Метки: магнитопровода, сборки, статором-ротором
...механизм 53 подачи шпоночной проволоки 54 к торцу корпуса 9.Устройство работает следующим образом.Первоначально корпуса статора 9 с помощью цеховых средств комплектом из четырех штук укладываются на гравитационный лоток 12 на первую и вторую позиции под упоры-отсекатели 13 и 14 с последующей передачей с позиций перед упором 13 на позицию перед упором 14 по мере ее освобождения.Приводом 21 наклонный подъемник 20 подводят на уровень лотка 12. Отсекатель 14 пропускает два корпуса 9 на подъемник 20. Корпуса скатываются до упора в стенку стеллажа 15. При обратном ходе подъемника 20 два корпуса 9 разделителем 22 распределяются на опорные нризмы 8. Выдвигаются прижимы 23 и фиксируют корпуса 9 на призмах 8.Приводится в движение каретка 25, на...
Формирователь управляющего сигнала для компенсации искажений типа “преобладание
Номер патента: 1092749
Опубликовано: 15.05.1984
Автор: Болотин
МПК: H04L 27/16
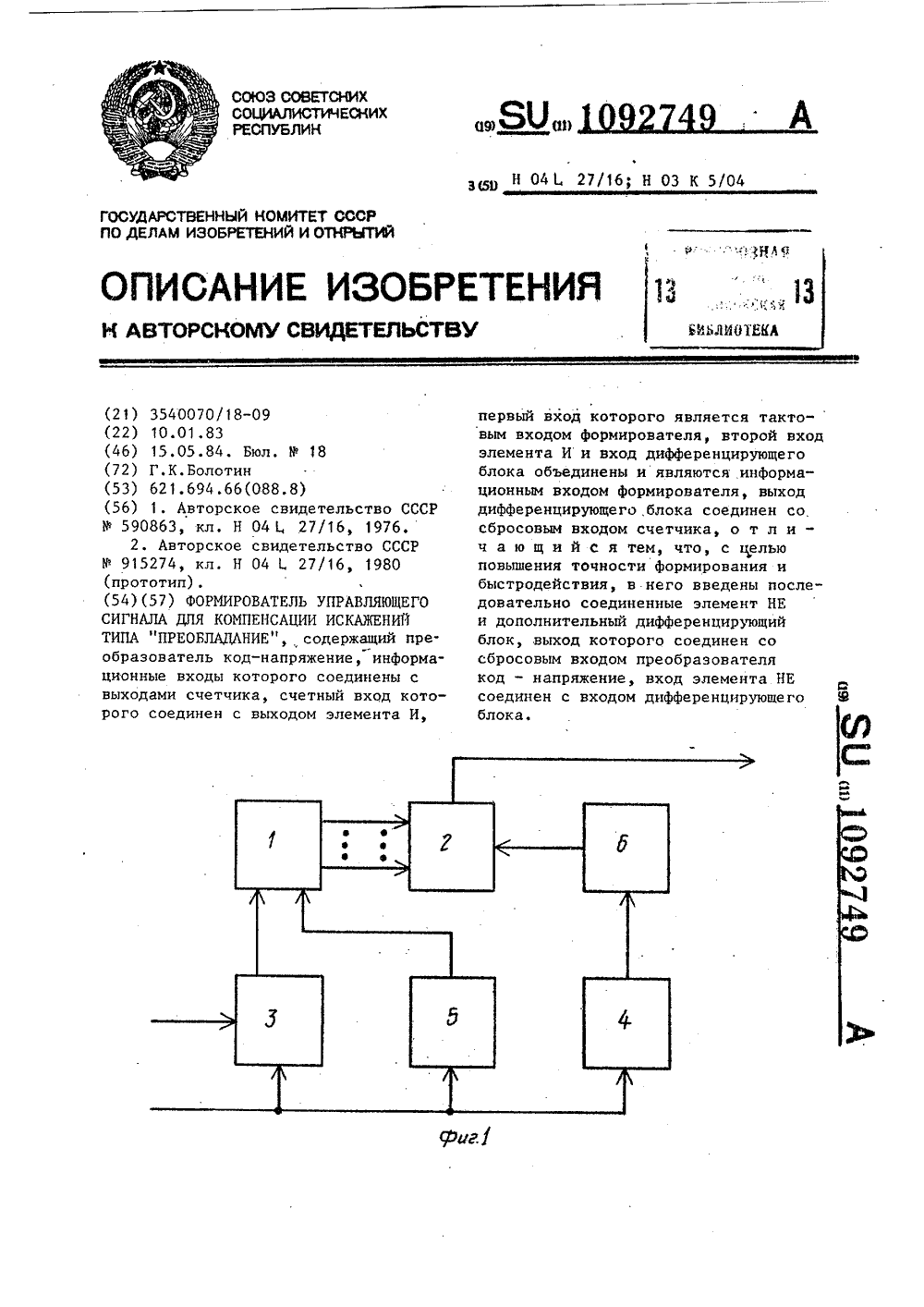
Метки: искажений, компенсации, преобладание, сигнала, типа, управляющего, формирователь
...погрешности формирования корректирующего воздействия(а следовательно, и выше точностькомпенсации искажений), так как вэтом случае однозначно уменьшаетсяи элементарная минимально возможнаявеличина приращения (т.е, шаг дискритизации выходного напряжения или,другими словами, "высота ступеньки",преобразователя код-напряжение)уровня корректирующего напряжения.На информационный вход поступаютъимпульсы, длительностькоторыххарактеризует величину имеющегосяпреобладанияпринимаемых элементовсообщения,В момент смены на информационном входе уровня напряжения логического нуля на уровень напряжения логической единицы (Фиг. 2 а) на выходе дифференцирующего блока 5 (фиг. 2 ъ) Формируется короткий импульс, сбрасывающий показания (заряд) счетчика...
Формирователь управляющего напряжения

Номер патента: 1312725
Опубликовано: 23.05.1987
Авторы: Заика, Изаксон, Колесников, Лесниченко, Смирнов
МПК: H03G 3/20
Метки: управляющего, формирователь
...Максимальное ослабление шумов определяется ИСХОЛЦОИ ЦОЛК) И ЦРН 1 Х (КЦ И Я С ЦВЦ(Н ) фильтра 9 верхних частот. которая усгднавливдстся цолачей цдцряжсция х исто 1- цикл 8 напряжения через уцрдвлясмьй,(с. литель 9 напряжения и цепь 1) рдзрялд цд хцрзвляк)(цие Входы ОсцОВИОГО 1) и лоцолцительного 20 фильтров Верхних частот.При поступлении цд вхол компрессрд сигнала с среднечдстотными состдвляющи. ми, уровень которых превышает порог срабатывания второго компаратора 3, и высокочастотными составляющими с уровнем ниже Хкд(;ИИОГО ИОРОгз ВтОРОи компдРдтОР Л с ) 1 Г т 11 В 1( Г и В 5 л к ) 1;1(. ти) (1 В, Яхн ) (гс ц 1) р 1:(ря,(1, через к(торт н прои х)лцг рд(ря. перв О кцлецсдторд 11 и (Оотцст 1 Вц цо сциждтся цдцряжеци( цд...
Предыдущий патент: Задающее устройство для электропривода
Следующий патент: Асинхронный электропривод
Случайный патент: Устройство для клепки