Способ определения и регулирования положения колес автомобиля и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
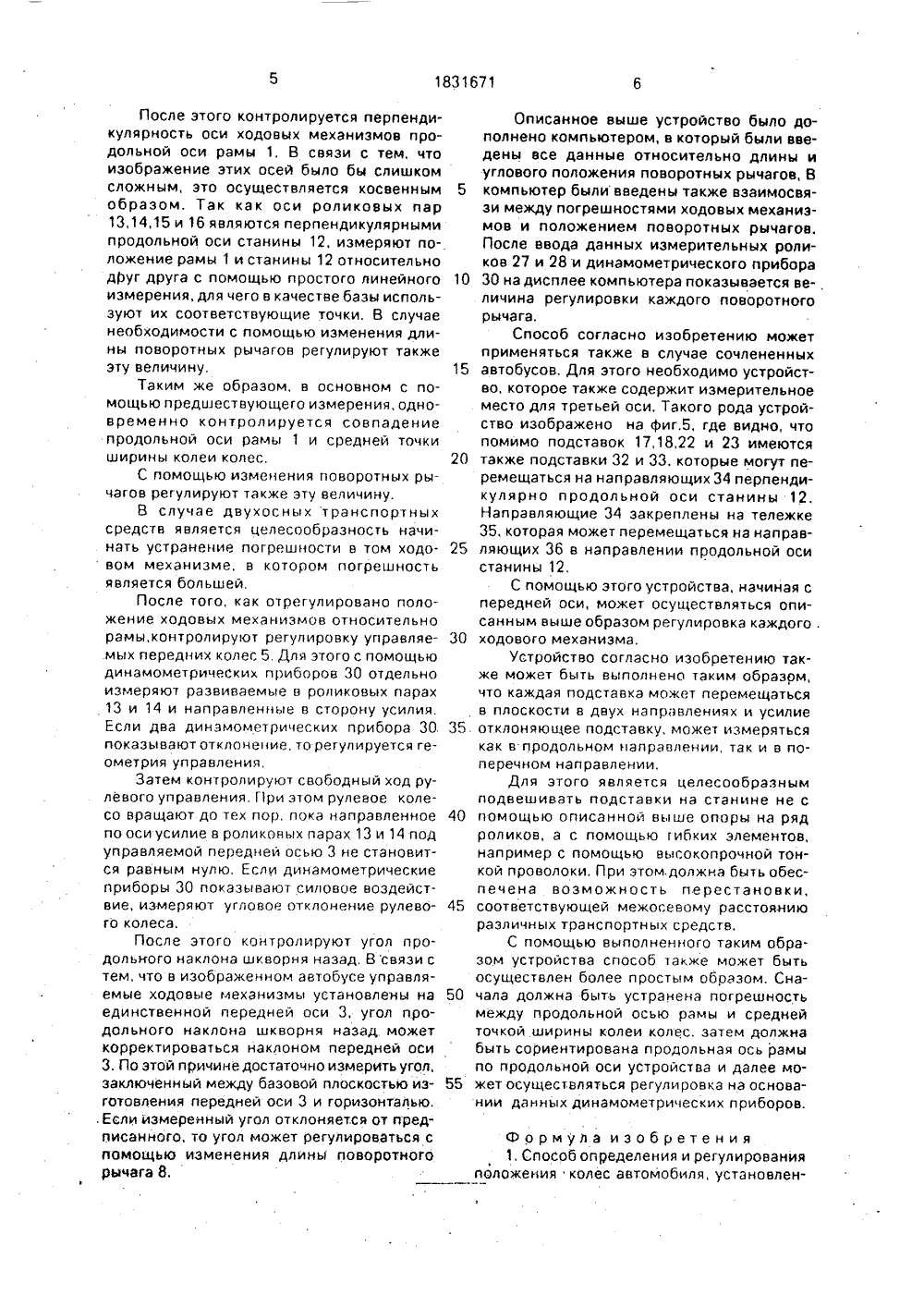
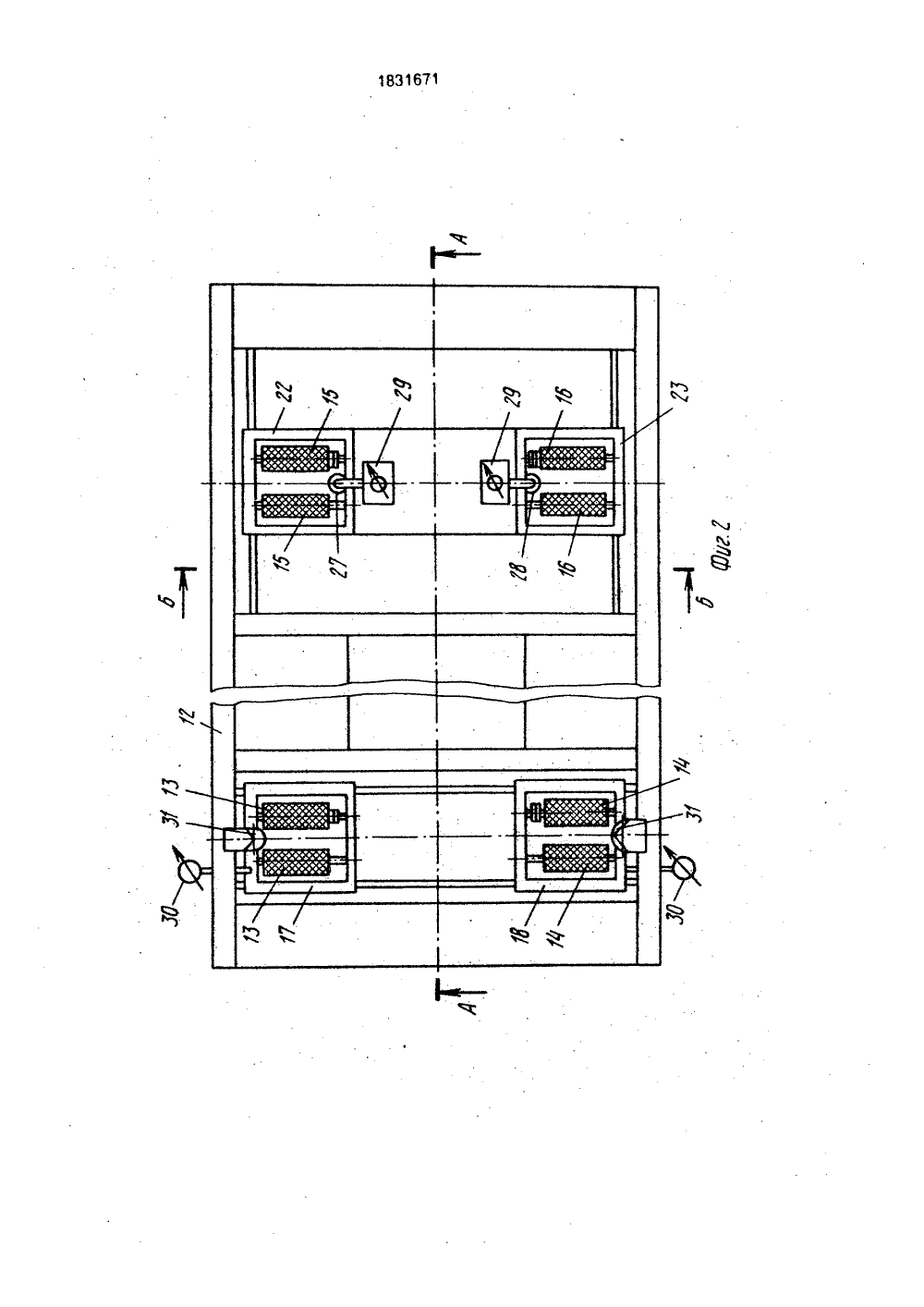
(51)5 6 01 6 САНИЕ ИЗОБРЕТЕН К ПАТЕНТУ И РЕГУЛИС АВТОМОДЛЯ ЕГО способу опреожения колес на рычажной имой подвески стройствудля Цель изобреональных возии положения биля одноврественно на одрой проходит ого для Изобретение о ройству, с помощь ляться иустранятьс колес автомобиля.Цель изобрете циональных воэмоНа фиг,1 изоб ния колес автобус сверху; на фиг.3 - фиг.4 - разрез Б-Б ению сначала втобусах. Расзображено на вматическими сь 3 и заднюю1 с помощью ара), установ, На передней е фун ния - расшижностей.ражена схемаа; на фиг 2 -разрез А-А нна фиг.2; нафг распо то ж ложее, вид а фиг.2; на иг.5 - вариГОСУДАРСТВЕНЮЕ ПАТЕНТНВЕДОМСТВО СССРГОСПАТЕНТ СССР)(71) Гепярмю Явито Кишсеветкеэет (НО)(56) Авторское свидетельство СССРВ 1147947, кл. 6 01 М 17/06, 1985.(54) СПОСОБ ОПРЕДЕЛЕНИ РОВАНИЯ ПОЛОЖЕНИЯ КОЛ БИЛЯ И УСТРОЙСТВО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к деления и регулирования пол автомобиля, установленных подвеске и/или осей независ относительно автомобиля и к у осуществления этого способа тения - расширение функци можностей. При определен колес каждое колесо автомо менно устанавливают соответ ну роликовую пару, ось кото осится к способу и усткоторых могут опредеогрешности установки перпендикулярно продольной оси находящегося в идеальном положении автомобиля. Ролики с правой и с левой сторон являются соосными, у каждой роликовой пары по меньшей мере один ролик вращают с помощью внешнего привода, у роликовых пар по меньшей мере один ролик и автомобиль вдоль его продольной оси опирают по меньшей мере в двух местах, предпочтительно на осевой линии ходовых механизмов, измеряют величину и направление опорных усилий, развиваемых в направлении оси опорных роликов и/или в опоре автомобиля, и опорные усилия уменьшают при известных обстоятельствах с помощью изменения длины регулирующих элементов рычагов, измеряют угол, заключенный между продольной осью автомобиля и осью роликов, определяют положение средней точки ширины колеи колес и продольной оси автомобиля по отношению друг к другу, затем устраняют разность при известных обстоятельствах, имеющуюся между продольной осью автомобиля и средней точкой ширины колеи колес, и регулируют угол, заключенный с осью роликов. на 90. 2 с, и 8 з.п.ф-лы, 5 ил,ант устройства, выполненн ненного автобуса, вид сверхуСпособ согласно иэобрет был применен в двухосных а положение осей автобуса и фиг,1. Рама 1 опирается пне рессорами 2 на переднюю о ось 4, подвешенные на раме поворотных рычагов (тяг Пан ленных на шаровом шарниреоси установлены колеса 5, на задней оси 4 -колеса 6. Передняя ось 3 удерживается вплоскости под осевой линией передних колес 5 с помощью двух и в плоскости над. осевой линией с помощью одного параллельных продольной оси рамы 1 поворотных рычагов 7 и 8. Кроме того. передняя ось3 за счет поворотного рычага 9 подвешенана раме 1 также в боковом направлении.Задняя ось 4 как в плоскости под осевойлинией задних колес 6, так и в плоскости надней удерживается в каждой плоскости соответственно двумя поворотными рычагами10 и 11. Расположенные в верхней плоскости поворотные рычаги 11 являются параллельными продольной оси рамы 1, впротивоположность чему расположенные внижней плоскости поворотные рычаги 10проходят от центра задней оси 4 в направлении продольных балок рамы 1. Длинакаждого поворотного рычага может регулироваться с помощью ходового винта.Для осуществления способа согласноизобретению служит изображенное нафиг.2-4 устройство,В станине (Капаеп) 12, состоящей изпрочных сальных балок, расположенычетыре роликовые пары 13.14,15 и 16 с горизонтальной осью, Положение этих роликовых пар в основном соответствуетположению передних колес 5 и задних колесб контролируемого автобуса, Оси роликовых пар 13 и 14 соответственно 15 и 16,расположенных на двух сторонах продольной оси станины 12, лежат на одной линиии являются перпендикулярными продольной оси рамы 12,Роликовые пары 13 и. 14; на которыеопираются передние колеса 5, установленыотдельно каждая соответственно в однойподставке 17 и 18, Подставки 17 и 18 расположены через ряд роликов 19 с малым сопротивлением трения и большой несущейспособностью на выполненных в станине 12направляющих 20 и 21. Направляющие 20 и21 расположены перпендикулярно продольной оси станины 12,Роликовые пары 15 и 16, на которыеопираются задние колеса б, также расположены каждая соответственно в одной подставке 22 и 23, однако эти подставки жесткосоединены друг с другом и опираются с помощью рядов роликов 24 с малым сопротивлением и большой несущей способностьюна выполненные в станине 12 направляющие 25 и 26. Направляющие 25 и 26 являются параллельными продольной оси станины12.304045 50 55 оси станины и закрепления,С помощью описанного выше устройства регулировку ходовых механизмов автобу са осуществляют следующим образом.Передние колеса 5 автобуса устанавливают на роликовые пары 13 и 14, задние колеса 6 -на роликовые пары 15 и 16, Контролируют соответствие давления шин предписанной величине и в случае необходимости производят регулировку давленияС помощью опорных роликов 31 создают опору для наружной стороны шин переднихколес 5 и с помощью измерительных роликов 27 и 28 создают опору для внутреннейстороны шин задних колес б. С помощью электродвигателя вращаютсоединенные с ним ролики и за счет этих роликов. вращают передние колеса 5 и задние колеса 6. Число оборотов выбирается таким, при котором автобус ехал бы со скоростью 25 км/ч.Если ходовые механизмы отрегулированы правильно, то усилие в боковом направлении не.будут показывать ни измерительные ролики 2 и 28, ни динамометрический прибор 30,Если направление оси ходовых механизмов не перпендикулярно продольной оси станины 12, то задняя ось 4 стремится уйти относительно станины 12, а передняя ось 3 стремится отклонить подставки 17 и 18, В этом. случае длину поворотных рычагов изменяют до тех пор. пока не устраняются направленные в сторону усилия. колеса 5 и заднего колеса б контролируемого автобуса. У каждой роликовой пары один ролик может вращаться с помощью клиноременного привода и электродвигателя.5 На подставках 22 и 23 между роликовыми парами 15 и 16 в средней плоскости между их осями расположено по одному измерительному ролику 27 и 28 с вертикальной осью. Измерительные ролики 27 и 28 расположены каждый соответственно в одном измерительном приборе 29 с подвижным в горизонтальной плоскости рычагом, В измерительном приборе 29 измеряется усилие, воздействующее на измерительные ролики 27, 28 соответственно производятся электрические сигналы, пропорциональные усилию.Подставки 17 и 18 подвешены на станине 12 каждая с помощью одного дина мометрического прибора 30 в осевомнаправлении роликовых пар 13 и 14,В средней плоскости между осями роликовых пар 13 и 14 расположены на станине 12 опорные ролики 31 с вертикальной осью, 25 имеющие возможность перпендикулярногоперемещения по отношению к продольнойПосле этого контролируется перпендикулярность оси ходовых механизмов продольной оси рамы 1. В связи с тем, что изображение этих осей было бы слишком сложным, это осуществляется косвенным образом. Так как оси роликовых пар 13,14,15 и 16 являются перпендикулярными продольной оси станины 12, измеряют положение рамы 1 и станины 12 относительно друг друга с помощью простого линейногоизмерения, для чего в качестве базы используют их соответствующие точки. В случаенеобходимости с помощью изменения длины поворотных рычагов регулируют такжеэту величину.Таким же образом, в основном с помощью предшествующего измерения, одновременно контролируется совпадениепродольной оси рамы 1 и средней точкиширины колеи колес,С помощью изменения поворотных рычагов регулируют также эту величину.В случае двухосных транспортныхсредств является целесообразность начинать устранение погрешности в том ходовом механизме, в котором погрешностьявляется большей.После того, как отрегулировано положение ходовых механизмов относительнорамы, контролируют регулировку управляемых передних колес 5. Для этого с помощьюдинамометрических приборов 30 отдельноизмеряют развиваемые е роликовых парах13 и 14 и направленные е сторону усилия.Если два динэмометрических прибора 30показывают отклонение, то регулируется геометрия управления,Затем контролируют свободный ход рулевого управления, Гри этом рулевое колесо вращают до тех пор, пока направленноепо оси усилие в роликовых парах 13 и 14 подуправляемой переднеи осью 3 не становится равным нулю. Если динамометрическиеприборы 30 показывают силовое воздействие, измеряют угловое отклонение рулевого колеса.После этого контролируют угол продольного наклона шкворня назад. В связи стем, что в изображенном автобусе управляемые ходовые механизмы установлены наединственной передней оси 3, угол продольного наклона шк во рн я назад. можеткорректироваться наклоном передней оси3. По этой причине достаточно измерить угол,заключенный между базовой плоскость о изготовления передней оси 3 и горизонталью,, Если измеренный угол отклоняется от предписанного, то угол может регулироваться спомощью изменения длины поворотногорычага 8. 10 15 20 25 30 35 40 45 50 55 Описанное выше устройство было дополнено компьютером, в который были введены все данные относительно длины иуглового положения поворотных рычагов, Вкомпьютер были введены также взаимосвязи между погрешностями ходовых механизмов и положением поворотных рычагов.После ввода данных измерительных роликов 27 и 28 и динамометрического прибора30 на дисплее компьютера показывается ве-,личина регулировки каждого поворотногорычага.Способ согласно изобретению можетприменяться также в случае сочлененныхавтобусов. Для этого необходимо устройство, которое также содержит измерительноеместо для третьей оси. Такого рода устройство изображено на фиг.5, где видно, чтопомимо подставок 17,18,22 и 23 имеютсятакже подставки 32 и 33, которые могут перемещаться на направляющих 34 перпендикулярно продольной оси станины 12.Направляющие 34 закреплены на тележке35, которая может перемещаться на направляющих 36 в направлении продольной осистанины 12,С помощью этого устройства, начиная спередней оси, может осуществляться описанным выше образом регулировка каждого .ходового механизма,Устройство согласно изобретению также может быть выполнено таким образом,что каждая подставка может перемещатьсяв плоскости в двух направлениях и усилиеотклоняющее подставку, может измерятьсякак в продольном направлении, так и в поперечном направлении.Для этого является целесообразнымподвешивать подставки на станине не спомощью описанной выше опоры на рядроликов, а с помощью ибких элементов,например с помощью высокопрочной тонкой проволоки, При этом. должна быть обеспечена возможность перестановки,соответствующей межосевому расстояниюразличных транспортных средств.С пол 1 ощью выполненного таким образом устройства способ также может бытьосуществлен более простым образом. Сначала должна быть устранена погрешностьмежду продольной осью ральфы и среднейточкой.ширинь, колеи колес. затем должнабыть сориентирована продольная ось рамыпо продольной оси устройства и далее может осуществляться регулировка на основании данных динамометрических приборов. Формула изобретения 1, Способ определения и регулирования положения колес автомобиля, установлен 1831671ных на рычажной подвеске и/или независимой подвеске, заключающийся в том, что на стенде с роликовыми опорами, на которые установлены колеса, определяют линию пересечения плоскости вращения колес и плоскости опорной поверхности колес по меньшей мере в двух местах вдоль диагностируемого автомобиля, предпочтительно на осевой линии колес, путем замера величины и наггравления опорного усилия каждого колеса, о т л и ч а ю щ и й с я тем, что, с целью расширения функциональных возможностей, уменьшают величины опорных усилий посредством изменения длины регулирующего элемента поворотных рычагов до нуля, измеряют величину угла между продольной осью диагностируемого автомобиля и теоретической осью. вращения колес, определяют взаимное положение средней точки ширины колеи колес и продольной оси автомобиля, и путем регулировки длины регулиру 1 ащего элеимента рычагов устраняет отклонение по расстоянию между продольной осью диагностируемого автомобиля и средней точкой ширины колеи колес и перпендикулярности продольной оси автомобмля и теоретической оси вращения колес,2, Способ по п,1, о т л и ч а ю щ и й с я тем, что производят измерение и регулировку каждого управляемого колеса, измеряют величину и направление боковых опорных усилий, возникающих в роликовых опорах, установленных под управляемыми колесами, а опорные усилия посредством регулировки элементов, определяющих положение управляемых колес, уменьшают до нуля,3. Способ и п,1 или 2, о тл ич а ю щий с я тем, что каждое колесо автомобиля, имеющего более чем два моста, в частности сочлененные транспортные средства, устанавливабт соответственно на одну роликовую пару, измерение и регулировку полокения колес производят последовательно, начиная с переднего моста, в случае сочленения транспортных средств эту операцию производят последовательно до шарнира сочленения, потом осуществляют регулировку рулевых тяг передних колес, затем остальных колес, находящихся за шарниром сочленения, а в конце осуществляют регулировку рулевых туг.управляемцх колес, находящихся за шарниром сочленения и рулевых тяг, связывающих передние колеса с управляемыми колесами, находящимися за шарниром сочленения,4, Способ по одному из пп.1-3, о т л ич а ю щ и й с я тем, что рулевое колесо установленного на роликах диагностируе 50 1015 20 2530 35 40 мого автомобиля поворачивают до тех пор,пока опорное усилие в направленной по оси опоре роликов под управляемыми колесами не становится равным нулю, и затем измеряют угловое отклонение рулевогоколеса,5. Способ по одному из пп,1-4, о т л ич а ю щ и й с я тем, что измеряют угол между горизонтальной или вертикальной плоскостью, служащей в качестве базы положения шкворня управляемых колес, и горизонталью и устанавливают угол продольного наклона шкворня, причем упомянутый выше угол устанавливают равным нулю и соответственно 90 по отношению к горизонтали,6. Способпоп 1,отличающийся тем, что колеса автомобиля устанавливают на роликовые пары, ось которых является перпендикулярной продольной оси диагностируемого автомобиля, находящегося в положении прямолинейного движения, определяют положение средней точки ширины колеи колес и продольной оси автомобиля по отношению друг к другу и устраняют разницу, имеющуюся между ними, с помощью изменения длины регулируемых элементов подвески колес, измеряют усилия, действующие на роликовые пары в осевомнаправлении и в перпендикулярном ему направлении, и с помощью изменения длины регулируемых элементов подвески колес изменяют величину этого усилия до нуля,7. Способ по одному из пп,1-6, о т л и - ч а ю щ и й.с я.тем, что измеренные величины расстояний, углов и усилий для различных марок автомобилей запоминают в компьютере, сравнивают измеренные данные с эталонными данными для данной марки автомобиля.и определяют необходимые величины перестановки регулируемых элементов подвески колес,8, Устройство для определения и регулирования положения колес автомобиля,имеющее измерительные элементы и роликовые пары, расположенные под колесами диагностируемого автомобиля и . имеющие ролики одинакового диаметра,ось каждого из которых расположена в горизонтальной плоСкостиперпендикулярно продольной оси диагностируемого автомобиля, ролики с правой и с левой сторон соосны, расстояние между роликами в роликовой паре меньше, чем диаметр контролируемого колеса, у каждой роликовойпары, по меньшей мере, один ролик. выполнен с приводом от механизма, вращающего его с одинаковым числом оборотов, о т л ич а ю щ е:е с я тем, что оно снабжено роликовыми дарами по числу контролируе 1831671 10мых колес диагностируемого автомобиля и опорными роликами, размещенными в плоскости осевой линии колеса диагностируемого автомобиля, закрепленными к станине в поперечном направлении с возможностью соприкосновения с колесами изнутри или снаружи, роликовые пары установлены в подставках, опирающихся на станину, с возможностью свободного перемещения роликов в направлении оси роликов и/или перпендикулярно оси роликов, а измерительные элементы расположены на месте крепления опорных роликов к станине и/или у подставок,9;Устройство по п.8, о т л и ч а ю щ е ес я тем, что подставки подвешены на станине с помощью элементов, нагружаемых на растяжение. 10. Устройство по п,8 или 9, о т л и ч а ющ е е с я тем, что оно снабжено направляющими, подставки под передние колеса установлены с возможностью перемещения в 5 поперечном направлении по направляющим, перпендикулярным продольной оси, подставки, на которых установлены задние колеса, жестко связаны между собой и установлены с возможностью перемещения по 10 направляющим, параллельным продольнойоси, или по направляющим, перемещаемым одновременно в поперечном и продольном направлениях. 15 П р и о р и те т по пунктам: 20,05.87 по пп. 1-5, 7, 8 и 10; 02.08.88 по пп, б и 9,1831671 у Iб орректор С Лиси да 2550 Тираж ПодпНИИПИ Государственного комитета по изобретениям и о113035, Москва, Ж-З 5, Рауаскэя наб., 4 гарина, 101 твенно-издательский комбинат "Патент", г. Ужго Составит Техреа М В. Ионоваргентал оерытиям ври ГКНТ СССР
СмотретьЗаявка
4355790, 20.05.1988
Гепярмю Явито Кишсеветкезет
ИШТВАН НЕМЕТ, БЕЛА ШИМОН, ИШТВАН НЕМЕТ
МПК / Метки
МПК: G01M 17/06
Метки: автомобиля, колес, положения
Опубликовано: 30.07.1993
Код ссылки
<a href="https://patents.su/7-1831671-sposob-opredeleniya-i-regulirovaniya-polozheniya-koles-avtomobilya-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения и регулирования положения колес автомобиля и устройство для его осуществления</a>
Колесо для автомобилей и др. повозок

Номер патента: 33065
Опубликовано: 31.10.1933
Автор: Циппер
МПК: B60B 25/04
Метки: автомобилей, др, колесо, повозок
...т с другим рычагом тс. Свободный конец последнего имеет вил кооб разную выемку г, которую можно надеть на палец я так, что рычаги и и ю образуют коленчатый затвор для концов части д обода, Если надавить на болт э снизу (по фиг. 3), то он раздвинет эти концы, причем болт т продвинется за линию, соеди:няющую центры пальцеви Д таким образом получается автоматическое замыкание затвора, и диаметр части ц обода несколько увеличится.В том месте, где находится затвор и, , ю, основной обод имеет еще более глубокую впадину о, снабженную отверстием, через которое можно управлять затвором при помощи какого- нибудь соответствующего инструмента.Надевание шины на снятый с колеса обод р, ц производится следующим образом. Коленчатый затвор и, о, ы...
Стенд для монтажа и демонтажа шин колес грузовых автомобилей

Номер патента: 1710360
Опубликовано: 07.02.1992
Авторы: Адиганов, Завьялов, Залесов, Казаков, Каламоец
МПК: B60C 25/132
Метки: автомобилей, грузовых, демонтажа, колес, монтажа, стенд, шин
...пневмоцилиндра 55, связанното цепями 56 с кареткой 57, установленной при помощи роликов 58 на направляющих 59 консоли 49. Шток 60 пневмоцилиндра 55 снабжен лапой 61, закрепленной на его конце при помощи пальца 62, выполненного на резьбовой втулке 63.Стенд работает следующим образом.Устанавливают колесо на площадку 12 эа счет роликов 13 и прижимают его К столу 4 который установлен в вертикальной плоскости исходное положение), Затем нажатием кнопки на пульте 31 управления производят вкл ючение электродвигателя 2 О, насоса 18 и гидроцилиндра 16, при.движении штока 15 которого через кронштейн 14 осуществляются вращение оси 2, уста новленной в раме 1, и поворот стола 4 с каркасом 3 на раму 1 до горизонтального положения. Затем .вручную...
Стенд для разборки колес грузовых автомобилей

Номер патента: 1643193
Опубликовано: 23.04.1991
МПК: B60C 25/135
Метки: автомобилей, грузовых, колес, разборки, стенд
...маслораспределителя 25, трубопроводов 26 и 27 и 28 и 29.40Маслораспределитель 25 снабжен перепускным устройством 30, автоматически осуществляющим ограниченный перепуск масла из нижней полости рирует его, а реборда 17 входит в углубление, образуемое диском опор ного стола 7 верхней частью вертикальной круговой стенкой 8. В сцентрированном положении колесо двигают вверх до тех пор, пока съемное кольцо 19 не упрется в упоры 21 и откроется замочное (разрезное) кольцо 19. Открывшееся кольцо удаляют. Далее с помощью маслораспределителя шток 3 головки 10 приводится в движение вниз, при этом нажимная головка 10 соприкасается с верхней кольцевой кромкой обода 16 колеса и прижимает реборду 17 обода 16 к диску опорного стола 7. При этом верхняя...
Устройство для монтажа дисковых колес на автомобилях

Номер патента: 1667629
Опубликовано: 30.07.1991
Автор: Роберт
МПК: B60B 29/00
Метки: автомобилях, дисковых, колес, монтажа
...на фиг, 12. За счет искривления и наклонного положения монтажного рычага 2 на наклонной плоскости известным образом возникает горизонтальная составляющая силы, которая способна оказать влияние на насадку коле. са.5 10 15 20 25 30 35 40 45 50 зывает вдоль шейки 11, причем процессумонтажа не мешает возможный перекосмежду монтажным рычагом 2 и втулкой 1,У известных монтажных рычагов в этомположении (фиг, 9) существует опасность того. что огранка 1 О выйдет из зацепления с 55 Устройство работает следующим образом,;Монтажные рычаги 2 вводятся в отверстия свободно прислоненного колеса 19 и путем простого надвигания выполняют по- движное соединение с втулками 1, посаженными на болты 4 для крепления колеса. За счет поднятия монтажного рычага 2...
Стенд для демонтажа шин колес грузовых автомобилей

Номер патента: 1671480
Опубликовано: 23.08.1991
Автор: Куклин
МПК: B60C 25/01
Метки: автомобилей, грузовых, демонтажа, колес, стенд, шин
...14 освобождается. Включаются электромагниты 12 и замочное кольцо притягивается, расширяясь, к профилированным поверхностям сердечников 13, причем за счет того, что гидроцилиндр 17 расположен шарнирно по отношению к раме 1 и к электромагниту 12, сердечники 13 плотно прижимаются в замочному кольцу 14. Включаются силовые цилиндры 17 и кольцо расширяется. По скольку траектория перемещения сердечников 13 отличается от прямой линии эа счет того, что замочное кольцо представляет собой целое тело и разррзано в одном месте, гидроцилиндр 17 поворачивается на оси 18 10 на некоторый угол, Затем включаются цилиндры 2 и 5 на ход "вниз", шина 11 освобождается от обода и замочного кольца 14.Цилиндр 2 приводится в исходное положение, и поворотом...
Предыдущий патент: Способ отображения амплитудно-частотного спектра виброакустического сигнала
Следующий патент: Способ определения прочности стенки трубчатого изделия на разрыв
Случайный патент: Штанговый конвейер