Способ формирования управляющего воздействия систем автоматического регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
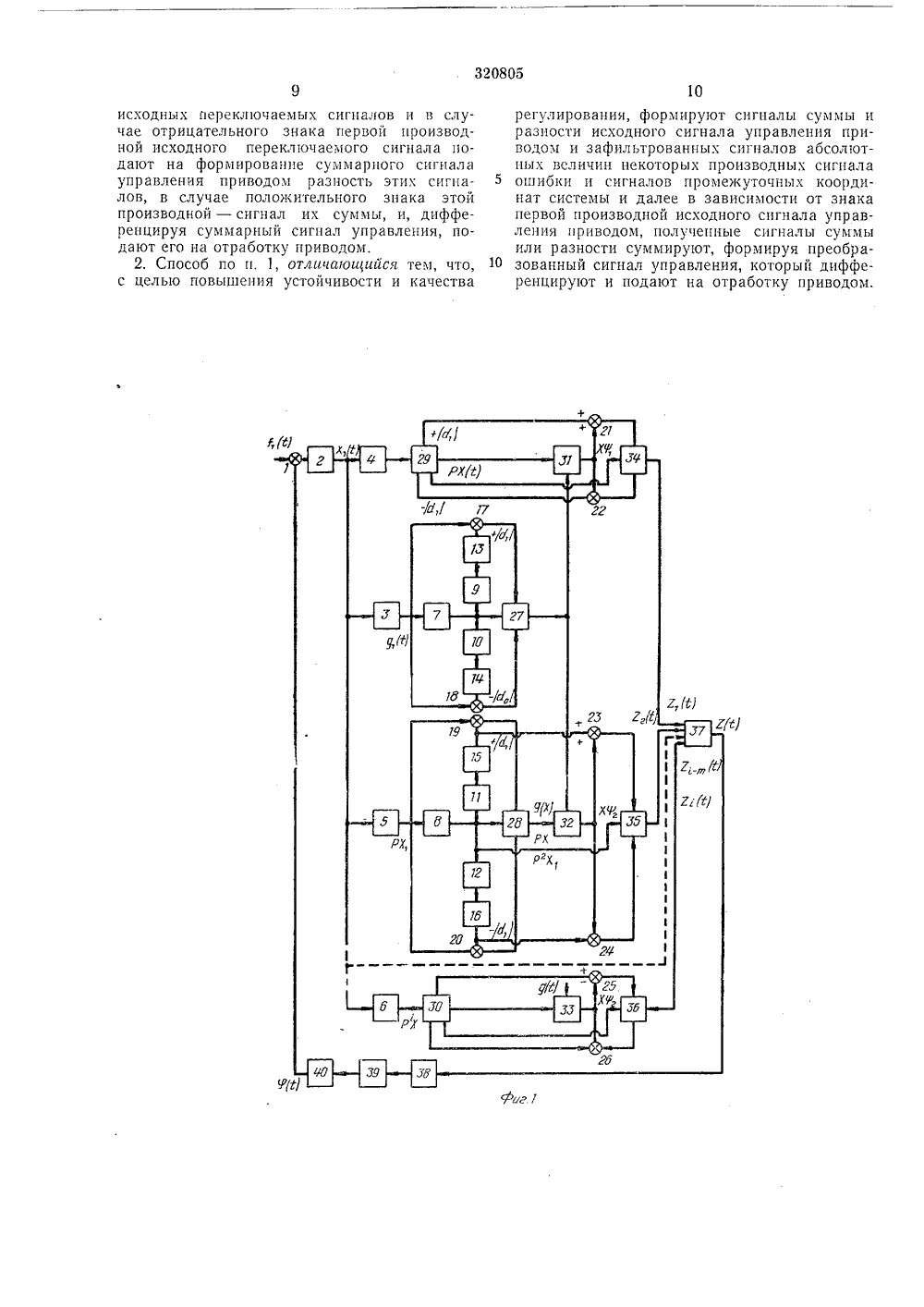
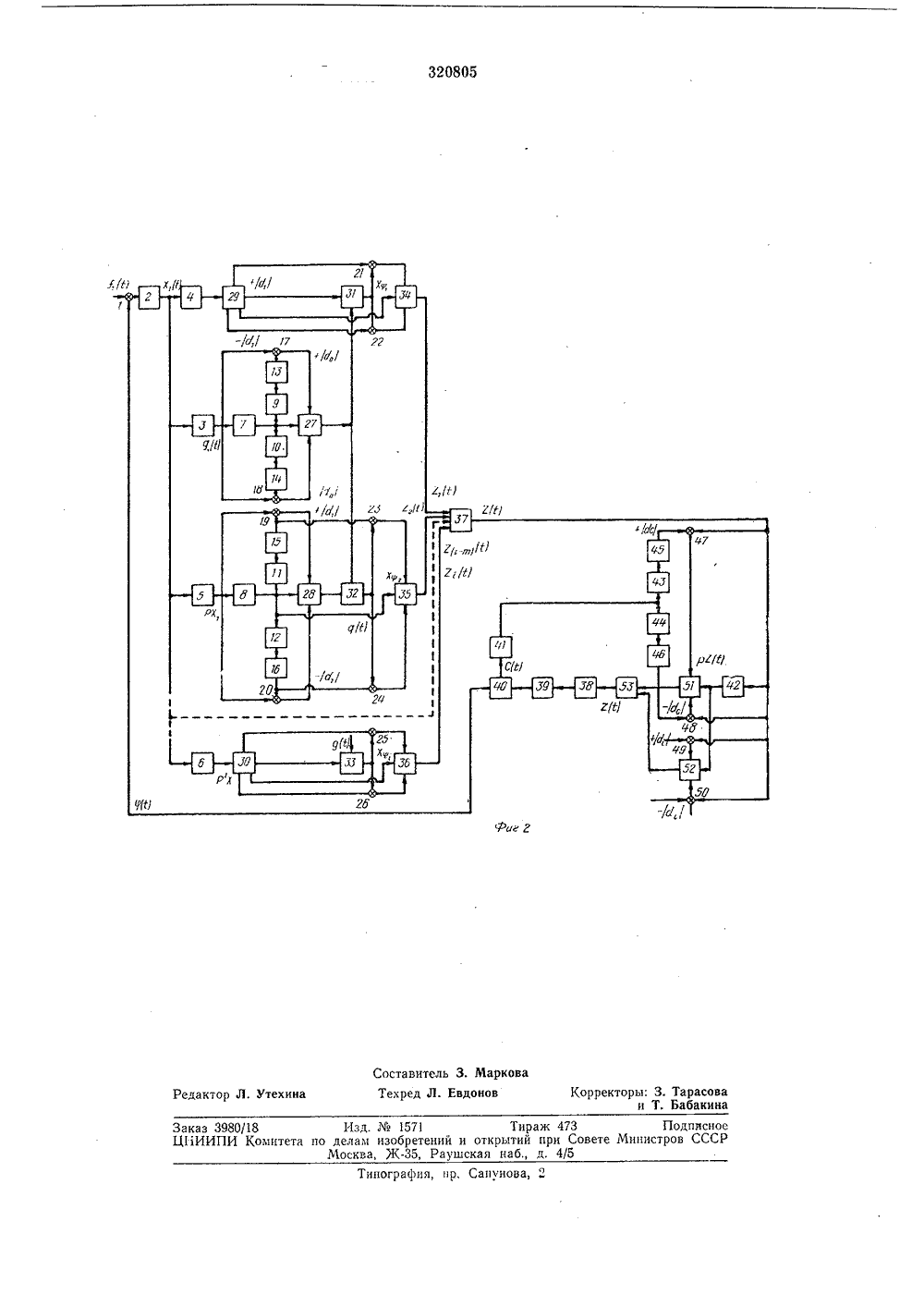
320805 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВКДЕТЕЛЬСТВУ Союз Советских Социалистических РеспубликЗависимое от авт. свидетельства МеЗаявлено 20.Х 1,1969 ( 1376837/18-24)с присоединением заявки МоПриоритет ПК 6 05 Ь 21/02 Комитет по деламбретений и открытий 1.3.078 (088.8) блик но 04.Х 1,1971, Бюллетень Хо 3 при Совете Министров СССРата опубликования описания 20.1.1972 Авторыизобретения А. Илюхин и В, Н. Сила Заявитель ПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯсиме Способ относится к технике автоматического регулирования и может быть использован для регулирования различных объектов при наличии высокого уровня помех на входе системы, а также при высоком уровне высокочастотных шумов ее аппаратуры,Известен способ формирования управляющего воздействия с использованием переменных структур, заключающийся в том, что на основе измерения сигнала ошибки системы формируется сигнал функции переключения в виде суммы сигналов ошибки и ее производных с числом членов на единицу меньше порядка системы, По сигналу функции переключений в зависимости от совпадения или несовпадения его знака и знака сигнала ошибки и его производных переключается сигнал ошибки, сигналы ее производных, а также некоторые промежуточные координаты таким образом, что при совпадении знаков сигнала переключения с переключаемым сигналом последний подключается на управление согласно устойчивой структуре, а при несовпадении их знаков - по неустойчивой структуре. Благодаря этому в системе устанавливается скользящий режим, ее поведение определяется управлением функции переключений и не зависит от изменения параметров регулируемого объекта. Ошибка стемы при этом за счет переключений из ряемых входных сигналов или некоторых координат системы, например координаты исполнительного привода, стремится к нулю, т. е. обеспечивается астатизм высокого по рядка.Недостаток рассмотренного способа связанс трудностями получения производных высокого порядка в условиях шумов и с невоз.можностью выполнения поэтому условия 10 скользящего режима, что приводит в случаяхвысокого уровня шумов к утрате системами приемных структур описанных положитель.ных свойств.Известен также способ, обеспечивающий 15 некоторое повышение помехоустойчивости засчет предварительной линейной фильтрации сигнала ошибки и снижения порядка произ.водных, формируемых в функции переключе.ния. В известном способе это достигается за 20 счет компенсирующего эту фильтрацию диф"ференцирования после переключений во вспо.могательном контуре, сформированном с по мощью промежуточных координат объекта на основе принципов переменных структур.25 Этот способ формирования управляющеговоздействия позволяет сохранить работоспо собность систем с переменной структурой только при наличии относительно невысокого уровня шумов путем обеспечения частотно 30 скользящих режимов, При высоком уровне3шумов известный способ не обеспечивает получения производных высокого порядка, так как наличие существенных нел и нейиостей в самой системе, например в исполнительных приводах, не обеспечивает достаточного подавления уровня шумов в ней.В отличие от известного способа исходные сигналы переключения и переключаемые сигналы по предлагаемому способу не используются непосредственно в переключениях, характерных для систем переменной структуры, а применяются для формирования из них и из их производных дополнительных сигналов, которые и посылают на кусочно- линейные переключения, свойственные переменным структурам, Получение этих дополнительных сигналов с помощью указанного принципа нелинейной компенсации шумов поясним на примере переключаемого сигнала, пропорционального сигналу по первой производной ошибки системы. Исходный переключаемый сигнал дополнительно дифференцируется один или (и - 1) раз, выделяется сигнал, равный по величине первой его производной, далее абсолютные величины производных фильтруются и путем алгебраического суммирования исходного сигнала с зафильтрованным сигналом абсолютной величины производной соответствующего знака формируется сумма и разность исходного переключаемого сигнала и зафильтрованного сигнала абсолютной величины его производной, При положительном значении первой производной исходного сигнала на переклю.чение подается сигнал, пропорциональный разности указанных сигналов, при отрица.тельном знаке производной исходного сигнала - пропорциональный сумме этих сигналов. Аналогично преобразуется сигнал ошибки и остальные исходные переключаемые сигналы и сигналы переключения.Преобразования сигналов можно записать в следующем виде:й,у 11 - д,(1)Ц при руЯ)0 (1)уф й,у+ й,(1) 1 при ру(1)(0 где р=Лу 11(1) - сигнал, в качестве которого может быть соответствующий исходный переключаемый сигнал или исходный сигнал переключения;у;(1) - преобразованный сигнал переключения или переключаемый сигнал;А (1) - зафильтрованный сигнал абсолютной величины производной соответствующего исходного сигнала;й, - коэффициент пропорциональностии.Сигналы, полученные преобразованием исходных сигналов, согласно формуле (1) подаются на кусочно-линейные переключения, выполняемые по известным приемам систем 4переменной структуры с той лишь разницей, что при этом переключаются соответствующие преобразованные по формуле (1) сигналы.Переключения выполняются таким образом, что при совпадении знаков преобразованных сигналов переключения и переключаемых сигналов последние подключаются на управление согласно устойчивой структуре, а при несовпадении знаков этих сигналов - согласно неустойчивой структуре. Полученные после переключения сигналы дополнительно преооразуются в обратной последовательности по сравнению с формулой (1), т. е. формируется сумма и разность переключенного сигнала и зафильтрованного сигнала абсолютной величины производной соответствующего ему исходного сигнала; затем при положительном знаке первой производной исходного сигнала используются сигналы, равные сумме указан ных сигналов, при отрицателы 1 ом - разнос иэтих сигналов. Преобразование описывается формулой:А,х.,+14 Ц при ру(г 0 25 ( И; х 1 -(й 1Ц при ру,1 (1) ( О,10) = (2)где х, - переключенный сигнал 1-й цепи.Сигналы после преобразования согласноформуле (2) суммируются с целью получения сигнала управления приводом. Полученный суммарный сигнал далее дифференцируется с целью компенсации фазового запаздывания и подается на обработку приводом системы.Чтобы обеспечить необходимое качестворегулирования системы и ее устойчивость в 35случае существенного изменения параметров объекта при работе системы в режиме простых переключений и увеличить степень подавления помех в заданной полосе частот сигнал управления приводом подвергают преобразованию в соответствии с формулой (1.).В этом случае в качестве слагаемых и вычитаемых в формуле (1) используются зафильтрованные сигналы абсолютных величин, производных некоторых промежуточных коор динат или выходной координаты системы, атакже некоторых преобразованных производных сигнала ошибки. Сигналы промежуточных координат или сигналы выхода системы в этом случае дифференцируются, выделяет ся зафильтрованный сигнал абсолютной ве;:ичины и формируются суммы и разности исходного сигнала управления приводом и каждого зафильтрованного сигнала абсолютных величин производной сигнала промежу точной или выходной координаты системыи зафильтрованного сигнала абсолютной величины некоторых производных сигнала ошибки. В случае положительного знака первой производной исходного сигнала управле иия приводом на отработку приводом подается сигнал полученной разности, а в случае отрицательного значения указанно 11 производной - сигнал суммы. Для установления скользящего режима подключение сиг палов суммы и разности, использующих в320805 5качестве слагаемых зафильтрованные сигналы абсолютных величин производных ошибкии возможно сигнала переключения, формирование преобразованного сигнала управленияприводом производят при обратном соотношении знака первой производной исходногосигнала управления. Иными словами, при положительном знаке его первой производнойиспользуют сигнал суммы, при отрицательном - сигнал разности исходного сигналауправления приводом и зафильтрованногосигнала абсолютной величины, соответствующей преобразованной или непреобразованнойпроизводной ошибки системы, а также сигнала переключения. Полученный в результате суммирования составляющих преобразованный сигнал управления далее дифференцпруется и подается на отработку приводомсистемы.Блок-схемы, приведенные на фиг. 1 и 2,иллюстрируют предлагаемый способ,На фиг, 1 и 2 обозначено:1 - датчик сигнала ошибки системы;2 - фильтр;3 - блок формирования исходного сигналапереключения;4 - 6 - блоки формирования исходныхпереключаемых сигналов по ошибке системыпо первой и -й ее производной;7 - 8 - блоки дифференцирования соответствующих исходных сигналов;9 - 12 - блоки формирования абсолютныхвеличин производных исходных сигналовсоответствующего знака;13 - 16 - блоки фильтров;17 - 26 - суммирующие блоки;27, 28 - логические элементы выделенияпреобразованных сигналов;29, 30 - блоки формирования преобразованных сигналов;31 - 33 - элементы кусочно-линейного переключения сигналов, учитывающие знак соответствующих переключаемых сигналов и сигналы переключения д(1);34 - 36 - элементы компенсационного преобразования нереключенных сигналов;37 - суммирующий блок формирования исходного сигнала управления приводом г(1);41, 42 - блоки дифференцирования сигналапромежуточной координаты с(1) и исходногосигнала управления г(1);43, 44 - блоки формирования абсолютныхвеличин производной координаты с(1) соответствующего знака;45, 46 - фильтры;47 - 50 - суммирующие блоки;51, 52 - логические элементы выделениясоставляющих преобразованного сигнала;53 - суммирующий блок формированияпреобразованного сигнала управления приводом г, (1).Схема, показанная на фиг. 1, работает следующим образом,Сигнал ошибки системы х(1) измеряется 5 10 15 20 25 30 35 40 45 50 55 60 65 бв датчике 1 как разница между входным сигналом , и выходным сигналом (1), сигнал ошибки фильтруется в фильтре 2 и путем многократного дифференцирования сигнала х,(т) и суммирования полученных произвОдных с сигналом ошибки х(1) в блоке формирования исходного сигнала переключения 3 получается сигнал переключения д(1), а в блоках 4 - 6 формируются исходные переключаемые сигналы, пропорциональные соотвЕтственно ошибке системы, первой и -й ее производной, где = 1, , и - 1 (и - порядок системы)Из указанных исходных сигналов согласно предлагаемому способу формируются преобразованные сигналы, которые подаются в элементы кусочно-линейного переключения 31, 32, 33, Порядок операций, которым подвергаются исходные сигналы, рассмотрим на примере получения преобразованного переключаемого сигнала по производной сигнала ошибки (по остальным сигналам этп операции аналогичны). Исходный переключаемый сигнал рх, с выхода блока 5 преобразуется в блоке 8, представляющем собой реальное дифференцирующее звено. Сигнал с выхода блока 8, пропорциональный производной сигнала рх, подается на входы блоков 11 и 12. Сигналы с выходов блоков 11 и 12 фильтруются в блоках 15 и 16 и поступают в блоки суммирования 19 и 20, где формируется сумма и разность исходного переключаемого сигнала рх с выхода блока 15 и зафильтрованных сигналов абсолютной величины его производной +4идс выходов блоков 15 и 16. Сигналы, пропорциональные сумме (блок 19) и разности указанных сигналов (блок 20), вместе с сигналом первои производной с выхода блока 8 поступают на входы логического элемента выделения преобразованного сигнала 28, который в соответствии с формулой (1) в случае положительного знака первой производной исходного сигнала рхь выделяет на выходе сигнал, пропорциональный разности сигналов, а в случае отрицательного знака первой производной, т. е. рх, - сигнал, пропорциональный сумме указанных сигналов. Аналогично преобразуются сигналы ошибки и -й ее производной в блоках формирования преобразованных сигналов 29, 30 соответственно, Блоки 29, 30 содержат как составляющие элементы, аналогичиые элементам 7, 9, 10, 13, 14, 17 и 18, входящим в блок формирования преобразованного переключаемого сигнала рх или соответствейно элементам 7, 9, 10, 13, 14, 17 и 18 входящим в блок формирования преобразованного сигнала переключения полярностей связей между группой элементов контура управлейия а(1)Преобразованный переключаемый сигнал рх с выхода блока 28 и преобразованные переключаемые сигналы, пропорциональйые сигналам ошибки х(1) с выхода блока 29, сигналам -й производной с выхода блока 30,5 10 15 го г 5 зо 35 40 45 50 55 бо 65 подаются на соответствующие входы элементов кусочно-линейного переключения 31 - 33. В элементах 31 - 33 происходит подключение преобразованных переключаемых сигналов в зависимости от совпадения их знаков со знаком преобразованного сигнала переключения полярностей связей д(1) в соответствии с устойчивой или неустойчивой структурой. Далее сигналы с выходов элементов 31 - 33 подвергаются компенсационному преобразованию в соответствии с формулой (2), для чего формируются сигналы суммы и разности этих сигналов с зафильтрованными сигналами абсолютных величин производных переключаемых сигналов в блоках 21 - 26 соответственно. Сигналы суммы и разности с этих блоков поступают на входы элементов компенсационного преобразования 34 - 36, на управляющие входы которых подаются сигналы, пропорциональные первым производным исходных переключаемых сигналов с выходов блоков 29, 8 и 30 соответственно,Скомпенсированные, преобразованные переключенные сигналы с выхода элементов 34 - 36 подаются на вход суммирующего блока 37, с выхода которого получают исходный сигнал управления приводом я(1), Для компенсации фазового запаздывания, вносимого фильтром 2 и отчасти нелинейными преобразованиями, сигнал управления приводом дифференцируют в блоке 38 и подают на отработку приводом 39 системы.С целью повышения помехоустойчивости системы за счет снижения уровня высокочастотных помех исходный сигнал переключения полярностей связей, сформированный в блоке 3, может быть получен путем суммирования преобразованных сигналов ошибки и рг - 1) производных, полученных в блоках формирования преобразованных сигналов соответственно с выхода блоков 13, 22, 24 ит.д.На фиг. 2 приведены элементы и блоки, введенные для повышения устойчивости системы.Повышение устойчивости достигается с помощью преобразования исходного сигнала управления г (1) с использованием сигналов промежуточной координаты с(1) и зафильтрованного сигнала абсолютной величины преобразованной -й производной сигнала ошибки, а также, возможно, производной сигнала переключения. Использование зафильтрованных сигналов преобразованных производных обеспечивает в режиме простых переключений увеличение подавления полосовых помех в случае применения преобразования по формуле (1) или обеспечение более надежного скользящего режима в случае применения преобразования по формуле (2).Рассмотрим случай преобразования сигнала г",согласно формуле (1)Преобразование сигнала управления приводом гф(1) в соответствии с формулой (1) 8производится в блоках 42 - 50 таким образом, что на выходе логического элемента 51 в случае отрицательного знака его первой производной получается сигнал суммы исходного сигнала управления приводом г", (1) и зафильтрованного сигнала абсолютной величины производной промежуточной коордипаты с (1), получаемого с помощью блоков 41, 43, 45, 47.В случае положительного знака производной сигнала управления приводом г, (1) получается разность указанных сигналов, формируемых с помощью блоков 44, 46 и 48 соответственно. Сигнал с выхода элемента 51 подается на вход суммирующего блока 53. В блоках 49, 50 формируется сумма и разность исходного сигнала управления приводом г," (1) и зафильтрованного сигнала абсолютной величины -й производной сигнала ошибки, которые подключаются с помощью логического элемента 52 также на вход блока 53 согласно формуле (1) или (2).На выходе суммирующего блока 53 получают преобразованный сигнал управления приводом г(1), который после компенсационного дифференцирования в блоке 38 подается на отработку приводом 39. Предмет изобретения 1. Способ формирования управляющего воздействия систем автоматического регулирования, заключающийся в том, что измеряют зафильтрованный сигнал ошибки системы и не более (и - 1) его производных, формируют сигнал переключения путем суммирования этих производных с сигналом ошибки и подают сигналы, пропорциональные производным сигнала ошибки и некоторым промежуточным координатам системы на переключение в соответствии с устойчивой и неустойчивой структурой в зависимости от совпадения или несовпадения их знаков со знаком сигнала переключения, и затем дифференцируют переключенные сигналы, отличающийся тем, что, с целью повышения помехозащищенности системы регулирования, исходный сигнал переключения и переключаемые сигналы дифференцируют, выделяют абсолютные величины обоих знаков сигналов этих производных, которые затем фильтруют и получают сумму и разность исходного сигнала и зафильтрованного сигнала абсолютной величины его производной, и при положительном значении производной первого порядка исходного сигнала на переключение устойчивой или неустойчивой структуры подают сигнал, пропорциональный разности полученных сигналов, при отрицательном знаке первой производной исходного сигнала - пропорциональный сумме этих сигналов, далее формируют сигнал суммы и разности переключенных сигналов и соответствующих им зафильтров анны х сигналов абсолютных величинисходных переключаемых сигналов и в случае отрицательного знака первой производной исходного переключаемого сигнала подают на формирование суммарного сигнала управления приводом разность этих сигналов, в случае положительного знака этой производной - сигнал их суммы, и, дифференцируя суммарный сигнал управления, подают его на отработку приводом.2, Способ по и, 1, отличающийся тем, что, с целью повышения устойчивости и качества регулирования, формируют сигналы суммы и разности исходного сигнала управления приводом и зафильтрованных сигналов абсол 1 отпых величин некоторых производных сигнала 5 ошибки и сигналов промежуточных координат системы и далее в зависимости от знака первой производной исходного сигнала управления приводом, полученные сигналы суммы или разности суммируют, формируя преобра зованный сигнал управления, который дифференцируют и подают на отработку приводом.Заказ 3980/18 Изд. Мз 1571 Тираж 473 Подписное Ц 11 ИИПИ Комитета по делам изобретений и открытий при Совете Министров СССР Москва, Ж.35, Раушская наб., д. 4/5 Типография, пр, Сапунова, 2
СмотретьЗаявка
1376837
П. А. Илюхин, В. Н. Силаев
МПК / Метки
МПК: G05B 21/02
Метки: воздействия, систем, управляющего, формирования
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/6-320805-sposob-formirovaniya-upravlyayushhego-vozdejjstviya-sistem-avtomaticheskogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования управляющего воздействия систем автоматического регулирования</a>
Устройство для измерения отношения сигнал помеха в телевизионном сигнале

Номер патента: 559455
Опубликовано: 25.05.1977
МПК: H04N 7/02
Метки: отношения, помеха, сигнал, сигнале, телевизионном
...входом блока 4 стробированця и памяти, и третий его выход - со вторым входом временчого селектора 2.Устройство рабстасг следуошцм образом.На вход подается полный телевизионный сигнал (ГТВС), пораженный низкочастотной мультиплцкатцвной помехой. Этот сигнал одновременно поступает на первый вход коммутатора 1, на вход блока 10 импульсов фиксации, селекции и стробцрования и на преобразователь 9, где происходит преобразование размаха сигнала изображения в постоянное напряжение с помощью пикового детектора с открытым входом и схемы фиксации уровня гасящих импульсов к нулевому потенциалу импульсамц фиксации, поступающими с блока 10 импульсов фиксации, селекции и стробирования.С блока 11 фиксации уровня отфиксированный по задним плонадкам...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1128385
Опубликовано: 07.12.1984
Авторы: Брунченко, Власюк, Охинченко
МПК: H03K 13/24
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...с шиной 3 синхронизации, выходы реверсивного счетчика 1 являются выходом 4 устрой ства, счетчик 5, первый и второй Р- триггеры 6 и 7, элемент 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, первый и второй логические блоки 9 и 10, причем шина 3 синхронизации соединена с входом счетчика 5 и входами синхронизации первого и второго 2 -триггеров 6 и 7, авыход старшего разряда реверсивногосчетчика 1 подключен к первому входупервого логического блока 9, к первому входу элемента 8 ИСКЛЮЧАЮЩЕЕИЛИ-НЕ и к входу первогоЮ -триггера6, выход которого соединен с вторымвходом элемента 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ,выход которого подключен к входуустановки в "0" счетчика 5, а выходсчетчика 5 - к первому входу второгологического блока 10, выход которого соединен с 3 -входом второго...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1216831
Опубликовано: 07.03.1986
Авторы: Савельев, Строд, Хофмаркс
МПК: H03M 7/36
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...когда на первый вход анализатора 2 полярности поступает нулевая пачка импульсов при наличии высокого логического уровня на втором входе анализатора полярности), то сигналявляется инверсным по отношению к сигналу 3 . На втором выходе анализатора 2 полярности при этом присутствует высокий логический уровеньПоскольку в общем случае частоты дискретизации ДМ и ИКМ сигналов различны, то для формирования выходно 12168311, Преобразователь дельта-модулированного сигнала в сигнал с импульс но-кодовой модуляцией, содержащий реверсивный счетчик, блок управления и триггеры задержки, входы которых подключены к выходам соответствующих разрядов реверсивного счетчика, первый и второй входы которого соединены с соответствующими выходами блока...
Способ коррекции ошибки следящего привода в системах программного управления
Номер патента: 204413
Опубликовано: 01.01.1967
Авторы: Клименко, Лоншаков, Хабенский
МПК: G05B 19/00
Метки: коррекции, ошибки, привода, программного, системах, следящего
...на выход следящего привода без отставания по фазе. таванне по фа щего привода. тановится бол отработать с, ибки следящ частотными со личиваются,увел нала зе этого си чивается отс в цепи следя стота ор с ую способен поэтому ош нные высоко аммы, не уве ше частоты, дящий приго привода, тавляющимп кото вод, вызв прог большим опере- едящего привода программы постуивода при после- но одновременно м выше частот ем по фазе ош рвого воопроиз на вход следя щитах воопроизве, темибка сл едениящего прдениях,от п дую Предлагаемый способ может быть реализо 10 ван в самонастраивающейся системе программного управления, Ошибку следящего,приьода при перовом воспроизведении программызаписьсвают двумя дополнительными магнитньсми головками на двух...
Способ переключения секторов в копировальных системах металлорежущих станков с дискретным

Номер патента: 182477
Опубликовано: 01.01.1966
МПК: B23Q 35/38
Метки: дискретным, копировальных, металлорежущих, переключения, секторов, системах, станков
...контура, спгнторов подаю-. прпперемещения датчопределяемого походного сигнала кфактическим напрзоне,Известные способы переключения секторов в копировальных системах металлорежущих станков основаны па принципе максимального рассогласования прп переходе инструмента в крайшою зону.Отличие гредлагаемого способа заключается в том, что выявляется знак производной рассогласования и с помощью логической схемы совпадения наличие того или иного знака сравнивается с фактическим направлешем подачи. В местах переключения секторов, когда направление подачи еще не изменилось, производная меняет знак на противоположный, а схема совпадения выдает команду на переключение подачи.Знак производной характеризует истинное перемещение датчика относительно...