Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
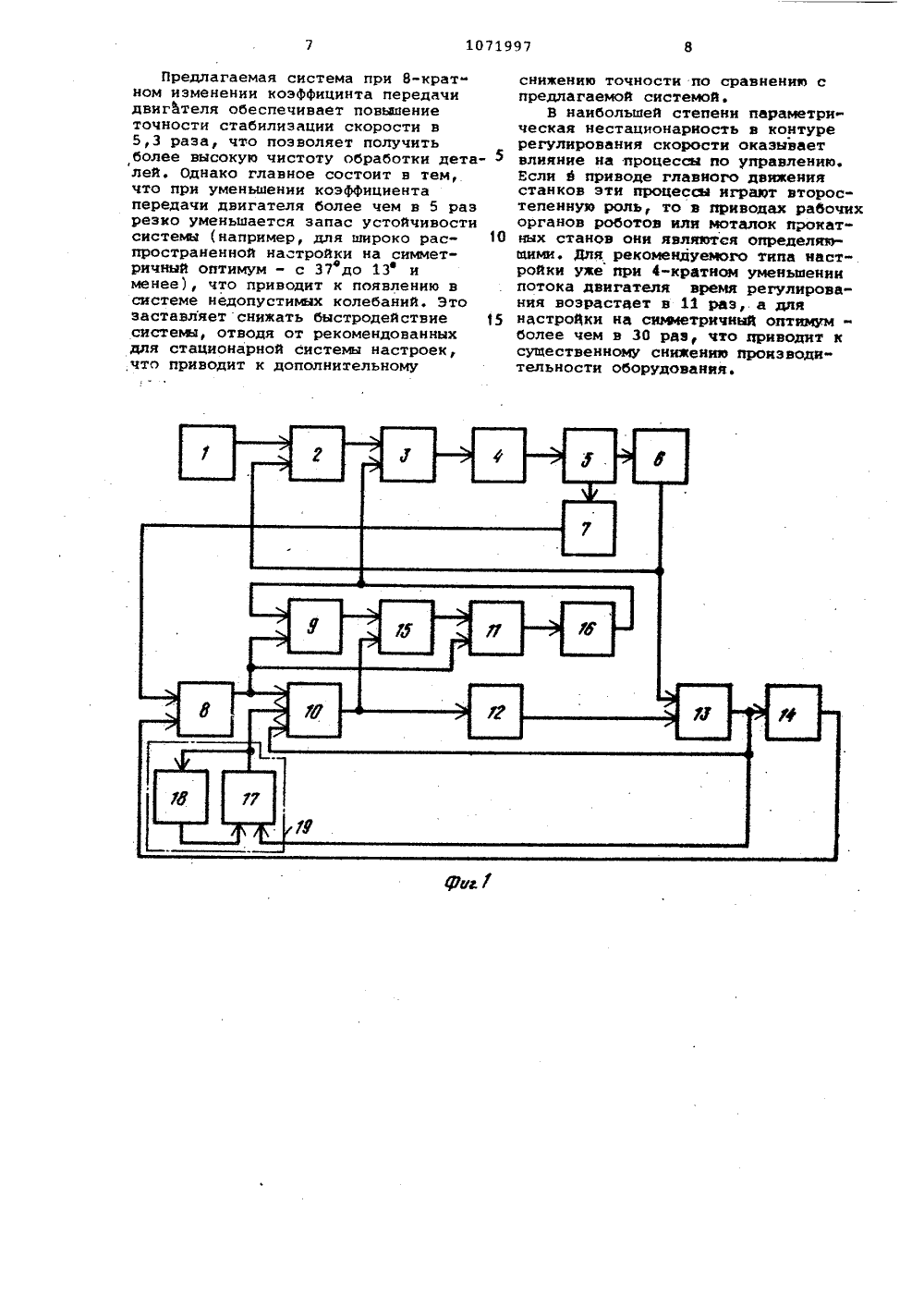
СОЮЗ СОВЕТСКИХМЦВВЮЮЕПЖИМРЕСПУБЛИК ю и 5 в и, сДАРСТВЕННЫЙ КОМИТЕТ СССРЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ 21 3496508/24122) 04.10.82И 9 07.02. 84. Бюл. В 572) Р.А.Борцов и В.В.Второв(71) Ленинградский ордена Ленинаэлектротехнический институтим.В.И.Ульянова 1 Ленина 11531 б 2-50(088.81Йб) 1. Авторское свидетельство СССРпо заявке В 3228588/18-24,кл. 0 05 В 13/Об, 1980,2, Авторское свидетельство СССРВ 651339, кл. 0 05 В 13/00, 1979(прототип 1.54) 157) САИОНАСТРАИВАПЩЗЯСЯ СИСТЕМАУПРАВЛЕНИЯ, содераащая последовательно соединенные эадатчик скорости,первый суыаатор, регулятор, усили"тель мощности и электродвигатель,соединенный с входами датчика скорОсти идатчика тока, последовательносоединенные второй сумматор и блок умнокения, последовательно соединенныетретий сумматор, первый интегратор,четвертый сумматор и второй интегратор, подключенный выходом к первому.входу второго сумматора, второй вход которого соединен с выходом датчика тока, второй вход регулятора подключен к выходу третьего интегратора и к второму входу блока умножения, выход датчика скорости соединен с вторым входом первого сумматора н с вторым входом четвертого сумматора выход которого подключен.,к первому входу третьего сумматора, о т л ич а ю щ а я с я тем, что, с целью обеспечения инвариантностн точност быстродействия и запасов устойчиво ти самонастраивающейся системы от величины тока электродвигателя, она содерпит релейный элемент, вход которого подключен к выходу четвертого сумматора, а выход - к второму входу третьего сумматора, а такие последовательнс соединейные пятый суьеатор, первый и второй входы которого соединены с выходами соответственно третьего сумматора и блока умноюення и блок деления, подключенный выходом к входу третьего интегратора, а вторым входом - к выходу второго сумматора и к третьему входу третьего сумматора.Изобретение относится к самоерастариваюшимся систамам автоматического управления для управления электроприводами, в которых в процессе работы имеет место изменение коэффициента передачи из-за регулыровия потока возбуждения двигателя и измекения момента инерции, нагруз ки, и может быть использовано, например, в системах автоматического управления приводами рабочих органов 0 макипуляционкых роботов в системах автоматического управления приводами главного движения металлорежущих станков, в системах автоматическогср управления приводами непрерывных 15 прокатных станов.Известна система управления, содержащая последовательно соединенные задатчик, регулятор, электродвигатель с усилителем мощности, Объект 7) управления, соединенный с входом датчика промежуточной переменной, идентификатор, первый измеритель ошибки и блок формирования сигнала управления, выход которого подключен ко второму входу регулятора, третий вход которого через сумматор соединен со вторым выходом идентификатора, а выход - со вторым входом идентификатора, третий выход которого через последовательно соединенный " второй измеритель ошибки, блок форми= рования сигнала коррекции и блок масштабных коэффициентов соединен с третьим входом идентификатора. Второй.в;сод блока формирования сигнала35 коррекции подключен к выходу первого измерителя ошибки, Второй вход котооого соединен с выходом эадат-. чика, выход датчика промежуточной переменной подключен ко второму входу второго измерителя ошибки. Данная система содержит идентификатор, но настройка его с целью адаптации к изменению параметров управляемого объекта осуществляется не параметри ческим, а сигнальным способом. Для этого формируется на выходе второго измерителя ошибки разница между дей. ствительным значением промежуточной переменной, снимаемым с датчика, и у ее оцененным значениям, вырабатываемым идентификатором, преобразуется в блоке формирования сигнала коррекции епредставляющем бй усилитель с большим коэффициентом .- усиления и ограничением) и через блок масмтабных коэффициентов подается на вход идентификатора, чем достигается работоспособность последнего при изменении параметров объекта е.П.Недостатком данной системы является ограниченный диапазон допустимых изменений параметров объекта управления. 65 Наиболее близкой по тсхичссскомуЛ:ВЕРН ИЮ К ПРРДЛ 2 Г 2 ЕМОЙ ЯВ 11 ЯР 1 С Н Са"МОИаСТРсаРЕВЯЮЩ 2 ЯСЯ СИСТЕМ 2 УПР 2 ВЛЕкия, сг 1 держ 211 рая последовательноСОЕДИКЬКНЬ 1 Е ЗацаТЧИК СКОРОСТИ ПРРвый суюлатор, регулятор, усилительМО,цксс и и электродвигатель,. Ооеди"екый мер:2 нически со входом датчрп.2 скорости и электрически " ссвходом датчр 1 ка тока, последова:ельо ссединЕнкые второй сумматор иблок умксже,1 ия, последовательносоедиэнные третий сумматор первыйинтегратор, четвертый сумматор ивторой ик- егратор подключенкь:ивыходом к первому входу второгосумматора второй вход которого соединен с выходом датчика тока второйьхсд регулятора подключен к выходутретьего интегратора и ко втор 11 мувходу блока умножения, выход датчикаскорости соедикек со сторым вхоцсм п=рвого сумматора и со в.срымвходом четвертого сумматора, выходКОТОРОГО ПОДКЛЮЧЕН К ПЕРВОМУ ВХОДУтретьего сумматора. Известная система работоспособна при переменноммоменте наГрузкир рРГулированииВОЗбуждекия двигателя и измененииего приведенного момента инерцииОсуществляет стабилизацию коэффициента усиления в Основном контуререгулировакия скорости д:Нгателя вусловиях широкого изменения электромехакичеаксй постоянной времеи псивода 21.Недостатксм известной сист мыявляется зависимость скорости самонастройки От среднего значения токадвигателя в переходных процессах,Вследствие этого в режимах, состВР СтУЮЩИУРОВ К сЕ 1 ТОКа МЕН ЬШИР 1дем те. на которые настроен, системаскорость самонастройки системы будетнедостаточной для точкой стабилизации ксктурксго коэфяициер 1 та усиленияОсновного контура регулирования вдезультате чего значение этого коэффициента Окажется меньше номинального и,. следовательно, уменьшитсяПИК 2 МИЧЕСКсрЯ ТОЧНОСТЬ КОНТУРа РЕГУлирсвния скорости его быст:сдейст-.вие Ел,. как правило ,прр 1 стандартныхнастройках типа симме;.ричкОГО ОптиМУМа)22 Пс 1 С УСТОЙЧИВОСТИБель зобретдния - Обеспечениеиквариактнссти точности быстродейтвия и запасорэ усторрчивсс"гр 1 Оамо -кастраиэающейся системь 1 ог величинытока =лдкт 11 одвигателя.,1 Пс ДР, Т 7;.жРК 1 ЛЯ ЭТСЦ ЦЕЛИ С 11 СТЕМа ДОПОЛНИТЕЛЬНО СОДРО)БИТ РЕПЕЙНЫЙ ЭЛЕМЕНТ ВХОД КОТОРОГО ПОДКЛЮЧЕН К выходу чет-.ертого сумматора, 2 вы- ХОД - КО ВТОРОМУ ВХОДУ ТРЕТЬЕГО СУМ 12 ТОРсср, а ".акжР ПОСЛЕДОВЭТРЛЬНО соединенные пятый сумматор пдрвый10 В соответствии с принципиальнойсхемой фиг. 2) згдатчик 1 можетбыть реализован, например, в видепотенциометра, сумматор 2 й регу лятор 3 - на одном операционномусилителе, например на интегральноймикросхеме К 553 УД 1 В, причем управление регулятором (изменение егокоэффициента передачи обратно пропорционально сигналу оценки коэфф фициента передачи двигателя) наиболее просто может быть осуществленоприменением полевого транзистора,например типа КТ 901. Сумматоры 8,10, 13 и 15, усилитель 17 и интеграторы 12, 14 и 16 могут быть выполнены на операционных усилителяхК 553 УД 1 В, слок 9 умножения и блок11 деления (реализуемый наиболеепросто в виде операционного усилителя с блоком умножения в цепи обратной связи) - например иа прецизионных интегральных микросхемаханалоговых перемножителей 525 ПС 1,нелинейный элемент 18 - в виде двухвстречно включенных стабилитронов.Самонастраиващая система управления работает следующим образом,Эадатчик 1 вырабатывает задающийсигнал, который через оуьвяатор 2, 40 регулятор 3 и усилитель 4 мощности,передается на двигатель 5, развивающий скорость вращения, соответствующую задающему сигналу. Указанное соответствие обеспечивается совместным 45 действием регулятора 3 и главной отрицательной обратной связи с выходадатчика б скорости иа вход суммато-ра 2, Настроечные параметры регулятора 3 выбраны таким образом, что 50 при номинальном приведеииом моментаинерции двигателя 5 и номинальномпотоке возбуждения динамическиесвойства системы (быстродействие идинамические ошибки по управлениюи возмущению) удовлетворяют техническим требованиям и считаются:оптимальными. 60 65 и второй входы которого соединеныс выходами соответственно третьегосумматора и блока умножения, и блокделения, подклоченный выходом к входутретьего интегратора, а вторым входом - к выходу второго сумматора и к третьему входу третьегосумматора.На Фиг. 1 изображена функциональная блок-схема самонастраивающейся системы управления, на фиг. 2 принципиальная схема примера конкретного выполнения системы,Предлагаемая система содержитзадатчик 1 скорости, первый сумматор 2, регулятор 3, усилитель 4 мощности, электродвигатель 5, датчик 6скорости, датчик 7 тока, второй сумматор 8, блок 9 умножения, третийсумматор 10, блок 11 деления, первыйинтегратор 12, четвертый сумматор 13второй интегратор 14, пятый сумматор15, третий интегратор 16, операционный усилитель 17, ограничительныйэлемент 18 и релейный элемент 19.Основной контур регулированияобразован блоками 1-6. Блоки 7-18образуют устройство идентификациикоэффициента передачи ток-скоростьэлектродвигателя. Оценка этого коэффицента, вырабатываемая интегратором16, подается на управляющий входрегулятора 3 перестраивая его коэффициент усиления, благодаря чемуобеспечивается постоянство козффи"циента усиления основного контура,а, следовательно, и стабилизацияего динамических свойств.В устройстве идентификации блоки7, 8 и 10, 12,13, 14,17,18 служатдля получения оценки производнойскорости двигателя. При этом интегратор 12 является моделью механическойчасти двигателя, вследствие чего навыходе сумматора 13 вырабатываетсясигнал, пропорциональный ошибкемежду истинным значением скоростидвигателя, снимаемым с выхода датчика 6 скорости, и оцененным значениемснимаемым с выхода интегратора 12.Таким образом, сумматор 10 вырабатывает оценку производной скорости.Сходимость вырабатываемых оценок,переменных к их истинным значениям,достигается благодаря введениюновых блоков 17 к 18, реализующих видеале знаковую релейную) функциюошибки, так что с течением времениошибка (выход сумматора 13) стремится к нулю. Важным для правильногофункционирования устройства идентификации является наличие интегратора 14, вырабатывающего оценкутоха нагрузки, вследствие чего сигнал на .выходе сумматора 8 служитоценкой динамического тока, т.е.той же переменной, которая реально действует на входе двигателя. Наличие информации о динамическом токеи о производной скорости двигателяупрощает исходную задачу, сводя еек задаче идентификации нестационарного коэффициента передачи безынерционного звена по его входному ивыходному сигналам. Радение этойзадачи обеспечивается совместнойработой блоков 9, 16 и вновь введенных блоков 15 и 11. Предложим, что момент кагрузки двигателя постоянеи, а коэффициент передачи уменьшился, например вслед. ствие увеличения приведенного момента инерции. В этом случае во время переходного процесса, например по управлению (западающий сигнал увеличился), выходной сигнал датчика7 тока, проходя через блоки 8, 10и 14, вызовет увеличение выходногосигнала интегратора 12, которыйвычитается в сумматоре 13 иэ сигнала датчика скорости, и на выходесумматора 13 появится отрицательныйсигнал ошибки. Вследствие этогона выходе масштабного усилителя 17появится постоянный отрицательныйсигнал, значение которого определяется параметрами нелинейного элемента 18, Этот сигнал, складываясь всумматоре 10 с выходным сигналомсумматора 13, будет уменьшать выход-ной сигнал интегратора 12 до техпор, пока он не сравняется со значением сигнала датчика скорости. Кактолько напряжение ошибки на выходесумматора 13 станет равным нулю,контур образованный блоками 10, 12;13 и 17, начнет работать с скользя" д)щем режиме (реальное скольжение сконечной частотой переключения, обусловленной неидеальностью элемейтов),поддерживая ошибку близкой к нулюблагодаря тому, что блок 17, охва-25ченный обратной связью 18, имеетв нулевой точке большой (теоретически бесконечный ) коэффициент усиления. Устойчивость скользящего режима обеспечивается наличием отрица,тельной связи между выходом сумматора 13 и вторым входом сумматора 10.Таким образом, выходной сигнал интегратора 12 асимптотически стремитсяк значению, пропорциональному скорости двигателя, вследствие чеговыходной сигнал сумматора 10 будетстремиться к значению, пропорцио,нальному производной скорости,40Описанные рассуждения верны при условии, что отрицательный сигнал на выходе интегратора 14 пропорционален току нагрузки, Предположим теперь, что нагрузка изменилась, например, момент нагрузки увеличил ся. Вследствие этого в первый момент напряжение на выходе датчика б скорости уменьшится, и на выходе сумматора 13 появится отрицательный сигнал ошибки, вследствие чего абсо лвтное значение отрицательного сигнала на выходе интегратора 16 возрастет, стремясь достичь значения тока нагрузки. Тем не менее, в силу инерционности интегратора 14 55 иа появление сигнала ошибки раньше отреагируют контур, составленный из блоков 10, 12 и 13, и контур, образованный блоками 10, 12, 13 и 17. Ири этом на выходе усилителя 17 60 появится постоянный отрицательный сигнал. В результате ошибка на выходе блока 13 снова устремится к нулю и затем изменят знак, иэ-за чего выходной сигнал блока 1465 будет стремиться уменьшиться, Однако новое переключение знака сигналаблока 17 и совместное действие указанных контуров заставят ошибку снова уменьшаться, а выходной сигналинтегратора 14 - увеличиваться и т.д,Таким образом, койтур , образованныйблоками 10, 12, 13 и 17, но-прежнему, будет работать в скользящемрежиме, с той, однако, разницей, чтосреднее значение сигнала на выходесумматора 13 будет иметь дополнительную отрицательную составляющую,наличие которой обусловлено несоответствием между значением выходногосигнала интегратора 14 и фактическим током нагрузки. Действие этойсоставляющей приведет в итоге кувеличению выходного сигнала интегратора 14 до значения, пропорциональногоновому значению тока нагрузки.,Т аким образ ом, н а выходе сумматора 8вырабатывается оценка динамическоготока двигателя. В блоке 9 умножения она умножается на выходнойсигнал интегратора 16, представляющий собой оценку коэффициента передачи двигателя. Далее в сумматоре15 результат вычитается нэ сигналаоценки производной скорости врашения. Такакак, по сделанному предложению коэффициент передачи двигателяуменьшился, а значение его оценкиосталось прежним, то на выходе сумматора 15 появится отрицательныйсигнал ошибки, который, проходячерез блок деления 11, где он делится на оценку дннамического тока,поступает на вход интегратора 16,уменьшая его выходной сигнал дотех пор, пока ошибка не станетравна нулю. В этом случае, очевидно,значение сигнала на выходе интегратора.16 будет точно соответствоватьнов му значению коэффициента переда"чи двигателя. Этот сигнал, поступаяна второй (управляющий) вход регулятора 3, увеличит его коэффициентпередачи, в результате чего коэффициент передачи основного контурарегулирования (скорости вращенияэлектродвигателя) остается неизменным.В предлагаемой системе исключеновлияние значения тока двигателя наскорость самонастройки благодаряпоследовательному включению блока 9умножения и блока 11 деления в контуре, образованном блоками 9, 15,11 и 16,Технико-экономические показатели системы приводятся в сравнении с базовым объекторм, в качестве которого принята типовая промышленная система управления электроприводом с двухзониым регулированием скорости вращения.Предлагаемая система при 8-кратном изменении коэффицинта передачи двигателя обеспечивает повышение точности стабилизации скорости в 5,3 раза, что позволяет получить более высокую чистоту обработки дета лей. Однако главное состоит в тем, что при уменьшении коэффициента передачи двигателя более чем в 5 раз резко уменьшается запас устойчивости системы (например, для широко рас пространенной настройки на симметричный оптимум - с 37 до 13 именее), что приводит к появлению в системе недопустимых колебаний. Это заставляет снижать быстродействие 15 систеьи, отводя от рекомендованных для стационарной системы настроек, ,что приводит к дополнительному снижению точности по сравнению с предлагаемой системой.В наибольшей степени параметрическая нестационариость в контуре регулирования скорости оказывает влияние на процессы по управлению. Если в приводе главного движения станков эти процессы играют второстепенную роль, то в приводах рабочих органов роботов или моталок прокатных станов они являются определяющими. для рекомендуемого типа настройки уже при 4-кратном уменьшении потока двигателя время регулирования возрастает в 11 раз, а для настройки на сюфеетричный оптимум- более чем в 30 раз, что приводит к существенному снижению производительности оборудования.1071997 Составитель В. НеФедовЕгорова Техред М. Гергель Корректор Г. Рваетник дактор краж 8 Заказ 123/39к дф илиал ППП "Патент", г. Ужгород, Ул. Проектная,ВНИИПИ Государств ло делам изобр13035, Москва, Жного комит ений и отк Рауша как н одписноеСССР
СмотретьЗаявка
3496508, 04.10.1982
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ВТОРОВ ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 07.02.1984
Код ссылки
<a href="https://patents.su/6-1071997-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Самонастраивающаяся система управления
Номер патента: 851339
Опубликовано: 30.07.1981
Авторы: Борцов, Второв, Ливкин, Поляхов, Путов
МПК: G05B 13/00
Метки: самонастраивающаяся
...сигна"ла, пропорционального динамическому щ току двигателя, как раз и осуществляется совместно датчиком тока и вновьвведенным третьим интегратором.На чертеже изображена функциональная схема предлагаемой самонастраивающейся системы управления.В соответствии с функциональнойсхемой предлагаемая самонастраивающаяся система управления содержит последовательно соединенные блок 1 задающего сигнала, сумматор 2, регуляЗо тор 3, блок 4 деления, усилитель 5мощности и электродвигатель 6, к которому подключены датчик 7 скоростии датчик 8 тока. Выход датчика токачерЕз последовательно соединенные З 5 сумматор 9, блок 10 умножения, сумматор 11, интегратор 12, сумматор 13,блок 14 умножения и интегратор 15подключен ко второму входу блока 4деления....
Устройство управления силовой установкой самолета с вертикальным взлетом и посадкой
Номер патента: 1144311
Опубликовано: 10.08.2004
Авторы: Новиков, Шиянов, Шолохов
МПК: B64D 31/06
Метки: вертикальным, взлетом, посадкой, самолета, силовой, установкой
Устройство управления силовой установкой самолета с вертикальным взлетом и посадкой, включающей подъемные и подъемно-маршевые двигатели, содержащее ручку управления двигателями, связанную с задатчиком скоростей вращения, первый выход которого связан с первым входом первого сумматора, а второй выход - с первым входом второго сумматора, датчик скорости вращения подъемного двигателя, выход которого соединен с вторым входом первого сумматора, датчик скорости вращения подъемно-маршевого двигателя, выход которого соединен с вторым входом второго сумматора, выход первого сумматора соединен с входом топливодозирующего блока подъемного двигателя, а выход второго сумматора - с входом...
Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором

Номер патента: 1010564
Опубликовано: 07.04.1983
Авторы: Калашников, Назаренко, Савченко, Сокотнюк, Шолтыш
МПК: G01P 3/46
Метки: асинхронного, вращения, двигателя, ротором, скорости, фазным
...служит для выде пения си гнала пропорционального произведению выпрямленного тока на скольжение 5.Коэффициент усиления сумматора по каждому входу вычисляется согласно выражению (1) .При подключении асинхронного двигателя 1 к сети напряжение ротора измеряется датчиком 4 напряжения ротора и подается на преобразователь 7 среднеквадратичных значений, кото рый обеспечивает эффективное выделение постоянной составляюцей. выпрямленного напряжения ротора О в гюлном диапазоне изменения его частоты. Свыхода преобразователя 7 среднеквадратичных значений сигнал, пропорциональный выпрямленному напряжению ротора О,поступает на второй вход втоаРрого сумматора 8. На первый вход второго сумматора 8 поступает сигнал,пропорциональный выпрямленному...
Сумматор-интегратор
Номер патента: 406207
Опубликовано: 01.01.1973
Авторы: Евдокимов, Казакевич, Крыжный, Огир, Пухов, Тимошенко
Метки: сумматор-интегратор
...иинтегрируемых первом шаге. При 1 = 1 на вхо поступают векторы .напряжений соответствующие значениям вхций на втором шаге интегрирования, которые, складываясь с вектором Го -- Г+ Гз+ Гз, поступающим на входы сумматоров 4 - 4 в начале второго такта из линий задержки 6 - б, образуют вектор напряжений СО = = Го+ И+Рз+ СРз Умножение векторами/" на ,дает приближенное значение интеграла суммы функций,на первом и втором шагах интегрирования. Таким образом, интеграл суммы трех функций на т шагах интегрирования определяется выражением где т - количество шагов интегрирования;11 - шаг интегрирования, который в общем случае может быть многоразрядным. 20Выбор числа разряда шага интегрировая определяется, с оджой стороны, разрядностью представления...
Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором

Номер патента: 758453
Опубликовано: 23.08.1980
Авторы: Алехин, Геродес, Копернак, Эллис
МПК: H02P 5/28
Метки: асинхронного, двигателя, ротором, скорости, трехфазного, фазным
...напряжении 0 =0 двигатель будет разбогать на реостатной характеристике, определяемой резисторами 2, 3 и 4. Система импульснофазового управления в этом случае будет подавать на управляющие электроды симисторовлишь тактовые импульсы, которые вырабатыва.ются при переходе напряжений ротора черезнуль. В течение каждого полупериода симисто.ры заГерты и в цепи ротора находится полноедобавочное сопротивление.Для работы на заданной скорости в блокезадания 18 устанавливают определенную величину задающего напряжения. Это наиряжениепоступает в сумматор 19, а разность двух на.пряжений Оз - О поступает в усилитель 17,осгде О - задающее напряжение, соответствующее выбранной скорости; О - напряжениеобратной связи по скорости, снимаемое с датчика...
Предыдущий патент: Адаптивная система управления
Следующий патент: Устройство для программного управления
Случайный патент: Противопригарное покрытие для литейных форм и стержней