Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
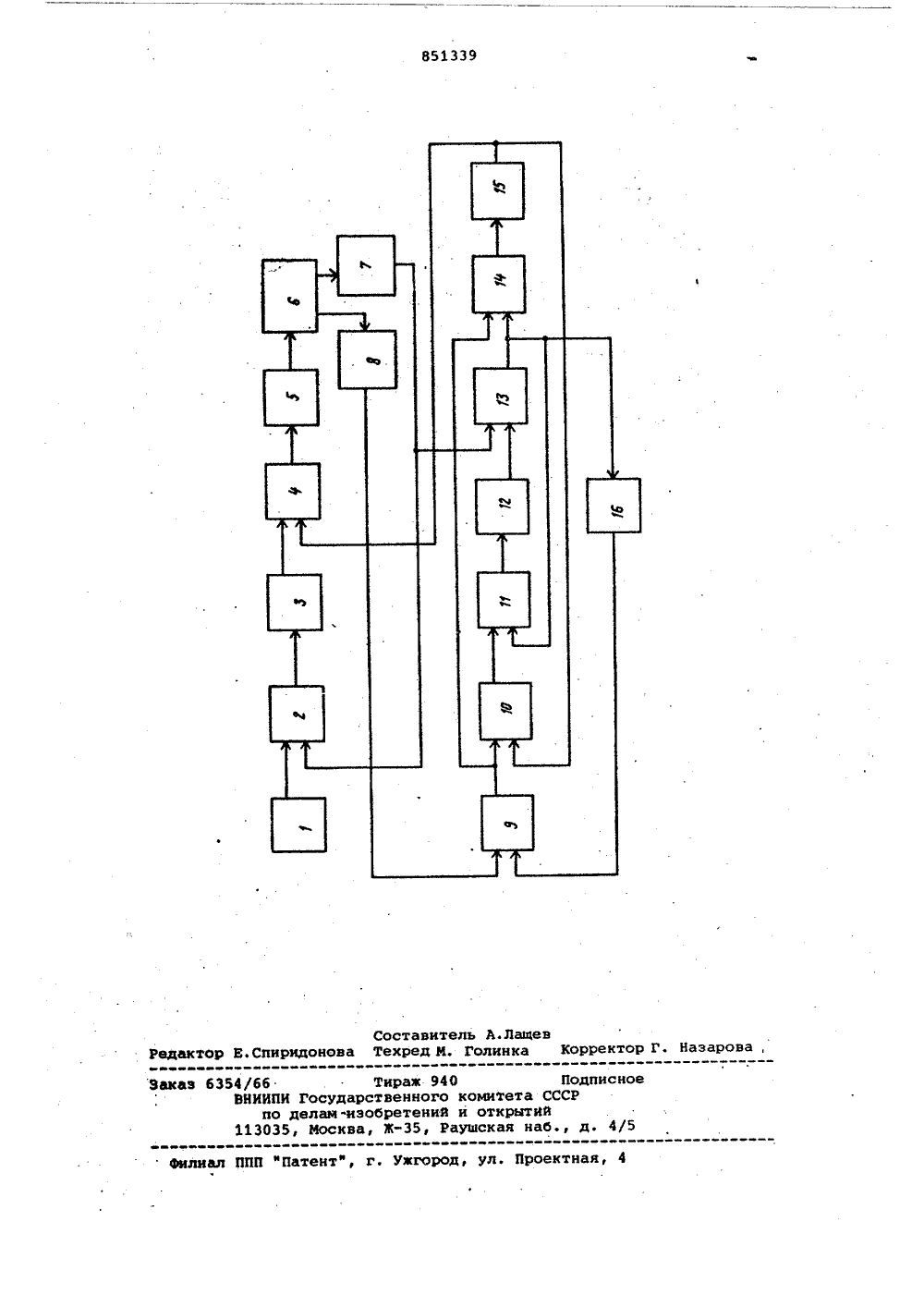
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКРМУ СВИ ЕТЕПЬСТВУ Союз Советских Социалистических Реснубаик(23) Приоритет осударствениый комитет ссср по аелам изобретений и открытий(088.8) ания 30,07.81 аопубликованняо 2) Авторыизобретен Ю.А. Борцов, В.Б. Второв, Н.Д. Поляхов, В,В. Путови Э.А. Лигкин и ордена Ленина эле технический институт Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами, в которых в процессе работы имеет место изменение контурного коэффициента усиления за счет регудирования потока возбуждения двигателя и изменения приведенного момента инерции, например, в роботостроении в системах автоматического управления приводами рабочих органов манипуляционных роботов, в станкостроении в системах автоматического управления приводами главного движения металлорежущих станков, в металлургии в системах автоматического управления приводами моталок непрерывных прокатных станов.1Известна самонастраивающаяся система управления, содержащая последовательно соединенные настраиваемый регулятор и объект, выход которого соединен со входом регулятора; а так же устройство идентификации переменных параметров объекта, выходы которого воздействуют на настраиваемые входы регулятора 1).Однако данная самонастраивающаяся система обеспечивает стабилизацию динамических свойств при управлении электродвигателем с переменным моментом инерции и регулируемым потоком возбуждения только при отсутствии момента нагрузки двигателя, поскольку используемое в ней устройство идентификации рассчитано только на объекты с одним входом. Это также ограничивает область применения данной системы.Наиболее близкая к предлагаемойсамонастраивающаяся система, содержа.щая последовательно соединенные блок задающего сигнала, сумматор, регулятор, блок деления, усилитель мощности и электродвигатель постоянного то" ка, соединенный со входами датчиков тока и скорости, приводящий в движение рабочий орган робота. При этом с целью стабилизации контурного ко эффициента усиления системы при изменении момента инерции механизма система дополнительно снабжена устройством идентификации, выход которого подается на второй вход блока деления.Устройство идентификации, вырабатывающее сигнал, обратно пропорциональный величине момента инерции, состо,ит из последовательно соединенных второго сумматора, один вход которого 30 подключен к датчику тока, а на другой вход извне подается сигнал, пропорциональный постоянному моменту сопротивления (нагрузки), блока умножения,третьего сумматора, интегратора, четвертого сумматора, второго блока умножения и второго интегратора,выход которого является выходом устрой 1 ства идентификации и подключен ко эторому входу блока деления. Выход еторого интегратора подается также навторой вход первого блока умножения, выход второго сумматора соединен со вторым входом второго блока умножения, выход датчика скорости подключен ко второму входу первого сумматора и ко второму входу четвертого сумматора, выход которого соединен со вторым входом третьего сумматора 2.Эта самонастраивающаяся система оказывается неработоспособной при переменном моменте нагрузки, так как она принципиально рассчитана лишь на работу электропривода с постоянным моментом нагрузки, когда на устройство идентификации подается извне постоянный сигнал, учитывающий наличие постоянного тока нагрузки. Кроме того, система оказывается неработоспособной при регулировании потока возбуждения двигателя, так как при этом ток нагрузки будет изменяться даже при постоянном нагрузочном моменте.Цель изобретения - расширение области применения самонастраивающейся системы управления путем обьпечения работоспособности системы в условиях, когда момент нагрузки является переменным, а также когда регулируется поток возбуждения. Укаэанная цель достигается тем, что в известную самонастраивающуюся систему управления, содержащую последовательно соединенные блок задающего сигнала, первый сумматор, регуля,тор, блок деления, усилитель мощности и электродвигатель, соединенный со входами датчикаскорости и датчика тока, причем выход датчика тока через последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый суьматор, второй блок умножения и второй интегратор подключен ко второму входу блока деления, выход датчика скорости соединен со вторым входом первого сумматора и со вторым входом четвертого сумматора, выход которого соединен со вторым входом третьего сумматора, выход второго сумматора соединен со вторым входом второго блока умножения, а выход второго интегратора соединен со вторым входом первого блока умножения, дополнительно введен третий .интегратор, вход которого соединен с выходом четвертого аумматора, а выход - сь вторым входом второго сумматора. Сущность предлагаемого изобретения заключается в том, что вновь введенный блок обеспечивает автоматическую оценку тока нагрузки двигателя,благодаря чему устройство идентификации, а с ним и вся самонастраивающаяся система управления в целом становится работоспособной не только припостоянном, но и при переменном моменте нагрузки, а также регулированиипотока возбуждения двигателя, чем и 10 достигается цель изобретения.В самом деле, поскольку устройство идентификации по существу представляет собой настраиваемую модельдвигателя. для его нормального функ ционирования необходимо подавать наего вход ту же величину, что и реально действующая на двигатель, т.единамический ток. Формирование сигна"ла, пропорционального динамическому щ току двигателя, как раз и осуществляется совместно датчиком тока и вновьвведенным третьим интегратором.На чертеже изображена функциональная схема предлагаемой самонастраивающейся системы управления.В соответствии с функциональнойсхемой предлагаемая самонастраивающаяся система управления содержит последовательно соединенные блок 1 задающего сигнала, сумматор 2, регуляЗо тор 3, блок 4 деления, усилитель 5мощности и электродвигатель 6, к которому подключены датчик 7 скоростии датчик 8 тока. Выход датчика токачерЕз последовательно соединенные З 5 сумматор 9, блок 10 умножения, сумматор 11, интегратор 12, сумматор 13,блок 14 умножения и интегратор 15подключен ко второму входу блока 4деления. Выход датчика 7 скорости щ соединен со вторыми входами суммато"ров 2 и 13. Выход сумматора 13 соединен со вторым входом сумматора 11,а также через интегратор 16 - со вторым входом сумматора 9, выход которого подключен ко второму входу блока14 умножения. Второй вход блока 10,умножения соединен с выходом интегратора 15.Предлагаемая самонастраивающаясясистема управления, например электродвигатель с переменным моментом инерции и регулируемым потоком возбуждения, работает следующим образом.Блок 1 задающего сигнала вырабатывает задающий сигнал, который через 35 сумматор 2, регулятор 3, блок 4 деления и усилитель 5 мощности передается на электродвигатель б, развивающий скорость вращения, соответствую"щую задающему сигналу. указанное сор ответствие обеспечивается совместнымдействием регулятора 3 и отрицательной обратной связи с выхода датчика7 скорости на вход сумматора,2, Настроечные параметры регулятора выбраны таким образом, что при номиналь8513ном приведенном моменте инерции дви" гателя и номинальном потоке возбуждения динамические свойства системы (быстродействие и динамические ошибки по управлению и возмущению) удовлетворяют техническим требованиям и считаются оптимальными.Предположим, что момент нагрузки двигателя постоянен, а коэффициент передачи уменьшился, например, вследствие увеличения приведенного момента инерции. В этом случае во время .переходного процесса, например, по 1 управлению (задающий сигнал увеличился) выходной сигнал датчика 8 тока, проходя через блоки 9, 10, 11 и 12, вызовет изменение выходного сигнала 15 интегратора 12, который вычитается в сумматоре 13 из сигнала датчика скорости, и на выходе сумматора 13 появится отрицательный сигнал ошибки. Будучи умножен в блоке 14 на положи тельный выходной сигнал сумматора 9, он вызывает уменьшение выходного сигнала интегратора 15, вследствие чего коэффициент передачи блока 10 умножения по первому входу уменьшается до .тех 25 пор, пока ошибка на выходе сумматора13 не станет равной нулю, а коэффи" циент передачи по первому входу блока 10 умножения (т.е. выход интегратора 15) не станет равным коэффици- р 0 енту передачи двигателя. Аналогичный процесс будет происходить, если задающий сигнал уменьшится.При изменении момента нагрузки, например при его увеличении, скорость З 5 двигателя начнет уменьшаться, а токвозрастать. Поскольку величина сигнала на выходе интегратора 16 соответствует прежнему (меньшему) значению момента нагрузки, то на первый вход блока .10 умножения поступает сигнал, 40 уже не.соответствующий динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 12 увели- . чивается (так как ток возрастает),в то время как выход датчика 7 скорос- ти уменьшается. Под действием появившегося на выходе сумматора 13 отрицательного сигнала рассогласования выходной сигнал интегратора 16 (его знак отрицателен) начнет увеличивать ся до тех пор, пока не придет в соответствие с увеличившимся моментом нагрузки двигателя.При одновременном изменении коэффициента передачи и.момента нагрузкидвигателя (этому случаю соответствует также режим регулирования потока при постоянном моменте нагрузки,так как при этом меняется и коэффициент 39 6передачи, и ток нагрузки) работа сис. темы происходит подобно тому, как описано выше При этом согласованная работа и правильное взаимодействие контура оценки коэффициента передачи, образованного блоками 9-15 и контура оценки тока нагрузки, включающего блоки 9, 10, 11, 12, 13 и 16, обеспечивается соответствующим выбором их контурных коэффициентов усиления,Таким образом, предлагаемая система при введении интегратора 16 меж ду выходом сумматора 13 и вторым вхд дом сумматора 9 обеспечивает идентификацию коэффициента передачи двига" теля при изменении момента нагрузки и благодаря этому осуществляет автоматическую стабилизацию контурного коэффициента усиления.формула изобретенияСамонастраивающаяся система управления, содержащая .последовательносоединенные блок задающего сигнала,первый сумматор, регулятор, блок деления, усилитель мощности и электроайдвигатель, соединенный со входамидатчика скорости и датчика тока,причем выход датчика тока через последовательно соединенные второй сумматор,первый блок умножения, третий сумматор, первый интегратор, четвертыйсумматор, второй блок умножения ивторой интегратор подключен ко второму входу блока деления, выход датчика скорости соединен со вторым входом первого сумматора и со вторымвходом четвертого сумматора, выходкоторого соединен со вторым входомтретьего сумматора, выход второго ссумматора соединен со вторым входомвторого блока умножения, а выход второго интегратора соединен со вторымвходом первого блока умножения, о тл и ч а ю щ а я с я тем, что, сцелью расширения области примененияпутем обеспечения работоспособностисистемы при переменном моменте нагрузки, в .нее введен третий интегратор, вход которого соединен с выхо"дом четвертого сумматора, а выходсо вторым входом второго сумматора.Источники информации,принятые во внимание при экспертизе1. Куэовков Н.Т. Модальное управление и наблюдающие устройства.М.,фМашиностроение", 1976, рис. 6-6.2, Журнал фЗлектротехиическая про-уаааленность", сер, Электропривод,1977, 9 8(6,1), с. 23-25 (прототип).851339 Составитель А.Лащевтор Е.Спиридонова Техред М. Голинка Корректо заро бб . ТиражКИПК Государственпо делам-иэобрет3035, Москва, Жаэ 635 940 Подписноого комитета СССРний и открытийРаушская наб д. 4/54 елиал ППП фПатентф, г. ужгород, ул. Проектная,
СмотретьЗаявка
2858533, 25.12.1979
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРО-ТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. B. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ВТОРОВ ВИКТОР БОРИСОВИЧ, ПОЛЯХОВ НИКОЛАЙ ДМИТРИЕВИЧ, ПУТОВ ВИКТОР ВЛАДИМИРОВИЧ, ЛИВКИН ЭДУАРД АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 30.07.1981
Код ссылки
<a href="https://patents.su/4-851339-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Следящий электропривод

Номер патента: 1833828
Опубликовано: 15.08.1993
МПК: G05B 11/01
Метки: следящий, электропривод
...повышенного приборного редуктора, усложняющего конструкцию и ухудшающего динамические свойства привода,Цель изобретения - повышение точности слежения электропривода,Указанная цель достигается тем, что в следящий электропривод, содержащий первый сумматор и предварительный усилитель-модулятор, соединенные последовательно, датчик положения ротора, первый выход которого соединен со входом первого . фазочувствительного выпрямителя, выход которого подключен к первому входу второго сумматора, выход которого подключен к входу первого релейного усилителя мощности, выход которого связан с первой фазной обмоткой исполнительного двигателя, в качестве которого использована синхронная электрическая машина с независимым возбуждением, а также...
Устройство для включения блока параллельно соединенных цепей с последовательно включенными импульсными лампами накачки лазера с защитой

Номер патента: 988150
Опубликовано: 15.06.1983
Авторы: Гендель, Журавлев, Семашко
МПК: H02H 7/12
Метки: блока, включения, включенными, защитой, импульсными, лазера, лампами, накачки, параллельно, последовательно, соединенных, цепей
...), каждый из которыхподключен к выходу соответствующего порогового элемента 10 и с третьими входами 15 (информационныевходы ), каждый из которых соединенс выходом соответствующего третьего порогового элемента 11, с выходами 16 по числу входов 14, каждый иэ которых подключен к соответствующему управляющему нходу 7 блока поджига б и,с клеммой аварийнойсигнализации 17, и две группы разделительных конденсаторов 18, общее количество которых соответствует числу параллельных цепей ИЛНблбка 5.Блок контроля (см. фиг. 2), вырабатывающий команды на запуск блока поджига до включения всех цепейна предупреждение аварийных ситуаций, содержит группу первых элементов И 19, выход каждого из которых является соответствующимвыходом 16 блока контроля,...
Устройство для функционального технического диагностирования блока последовательно соединенных тиристоров

Номер патента: 1365235
Опубликовано: 07.01.1988
Авторы: Вейцман, Илькенс, Лаужа, Лейманис, Узарс, Феоктистов, Храмцов
МПК: H02H 7/10
Метки: блока, диагностирования, последовательно, соединенных, технического, тиристоров, функционального
...Н, - выходной сигнал элемента 8 временной задержки; 0 з,0 - выходные сигналы триггера 7 и3 1365триггера 6; П П - выходные сигналыэлементов И 9 и 10, появляющиеся принеконтролируемых переключениях отдельных тиристоров силового тиристор- .5ного блока 1,Устройство работает следующим образом.Диагностируемый силовой блокс последовательно соединенными тиристорами управляется блоком 2 управления, сигнал от одного из выходов которого поступает на формировательрасширитель 5 импульсов устройства.По переднему фронту выходного сигнала 15формирователя-расширителя 5 импульсаориентируется триггер 7, а по заднему - триггер 6, При приложении к блоку 1 обратного напряжения в процессекоммутации блок 4 выдает сигнал, обусловленный неодновременностью...
Устройство для регулирования мощности в трехсекционной нагрузке с последовательно соединенными секциями

Номер патента: 1427523
Опубликовано: 30.09.1988
Авторы: Заборня, Камышев, Кохан
МПК: G05F 1/66, H02M 5/257
Метки: мощности, нагрузке, последовательно, секциями, соединенными, трехсекционной
...включены ключи 17, к нагревателям подводится сетевое напряжение Пн, 11 ц, Бн) на Фиг.2. Время подключения нагревателей 1 " 3 к сети так же, как и квадратора 7 к сумматору 14, пропорционально ве " личине напряжения на выходе, интеграторов 15 Щ- Бв Ов- на Фиг.2). Поэтому дальнейшее увеличение напря женин на интеграторах 15 за счет входного напряжения компенсировано напряжением с квадратора 7, поступаю щим на интеграторы 15 через суммато ры 14 и ключи 13.Аналогично работает устройство при изменении сетевого напряжения, Например. при уменьшении амплитудысетевого напряжения напряжение е квадратора 7 не полностью компенсиру ет напряжение на выходе интеграторв 15, которое увеличивается до тех пор пока уменьшение амплитуды сетевого напряжения...
Система регулирования нагрузки энергетического блока

Номер патента: 732561
Опубликовано: 05.05.1980
Авторы: Кулаков, Литвинец, Молев, Писарчик
МПК: F01K 3/02
Метки: блока, нагрузки, энергетического
...отклонения давления пара перед турбиной обеспечивается форсированное изменение732561 Формула изобретения Составитель В. НазаровТехред К. Шуфрич КорТираж 583 ПоГосударственного комитета СССРлам изобретений и открытийква, Ж - 35, Раушская наб., д. 4/5Патент г. Ужгород, ул, Проектная, 4 ректор Н. Сдписное Редактор М. ВасильеваЗаказ691/25ЦНИИПИло д13035, МоФилиал ППП активной мощности блока. Поскольку датчик 1 отклонения вырабатываемой мощности от заданного значения подключен к главному регулятору 2 непосредственно, для регулятора 4 давления пара как элемента системы регулирования нагрузки энергетичес кого блока сигнал производной по активной мощности является гибкой отрицательной обратной связью, что позволяет повысить устойчивость...
Предыдущий патент: Самонастраивающийся привод
Следующий патент: Способ электроэрозионных испыта-ний kohtaktob и устройство дляосуществления этого способа
Случайный патент: Приспособление для смазки реборд колес железнодорожного подвижного состава