Система идентификации параметров объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
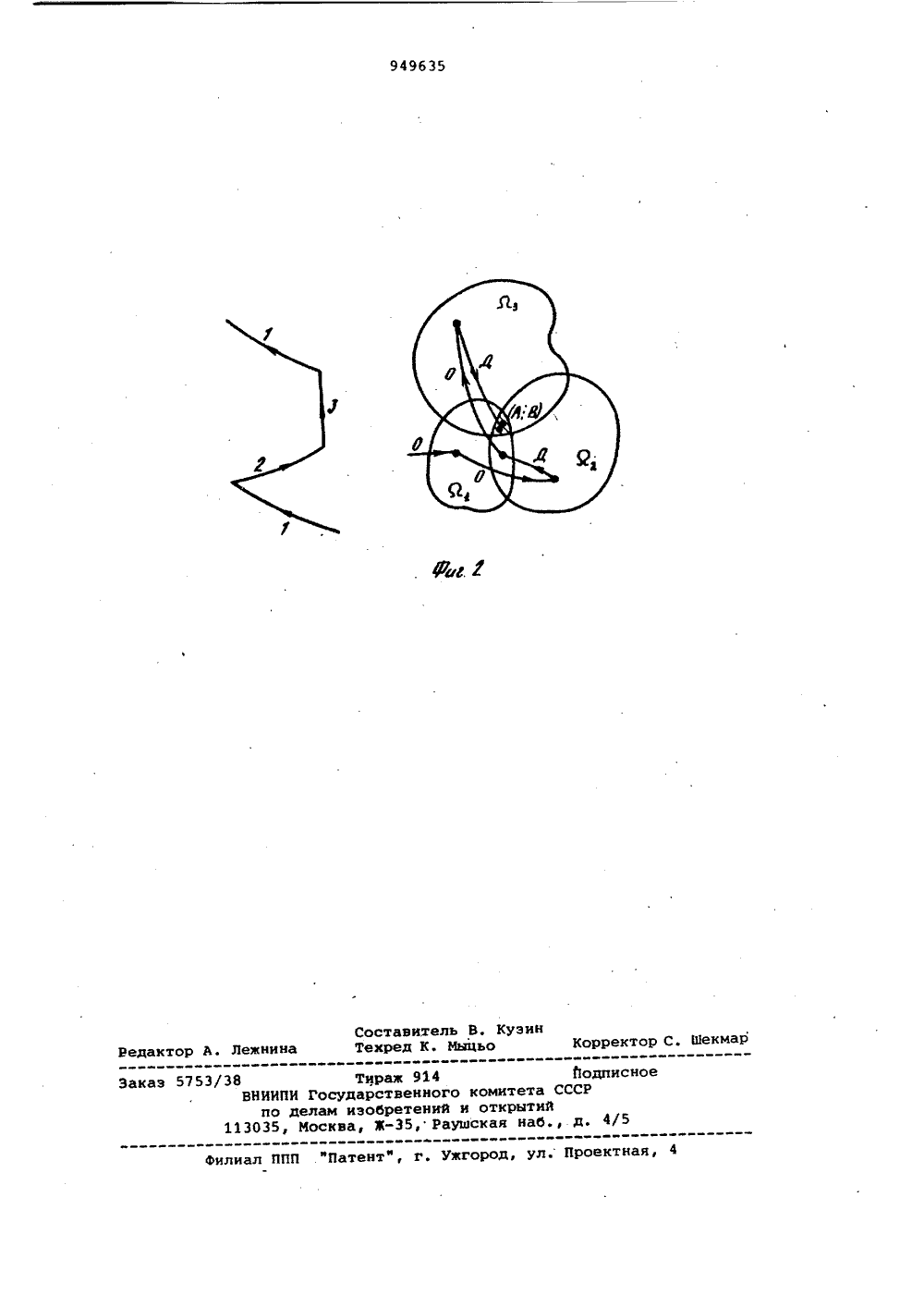
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СфеетскнхСецналнстнческнхРеспублик 949635(22) Заявлено 28.10.80 (2) 2998655/18-24с присоединением заявки Йо(23) ПриоритетОпубликовано 07,08,82,Бюллетень Й 9 29Дата опубликования описания 07.08,82 1511 М. Кп.з С 05 В 13/02 Государственный комитет СССР по делам изобретений и открытий(71) Заявитель Ленинградский ордена Ленина электротехйФтееиий., институт им, В.И.Ульянова (Ленина)(54) СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ОБЬЕКТА Х =АХ+ ВБ(1)Ц -ЬХ э (2) 15(4) Изобретение относится к автоматическому управлению, в частности адаптивных систем управления подвижными объектами.Известна система идентификации параметров объекта, в которой подстраивается под объект его динамическая модель с целью минимизации сигнала, характеризующего степень несовпадения их выходных переменных 1 .Наиболее близкой к предлагаемой по технической сущности является система идентификации параметров объекта, содержащая первый блок реализации алгоритмов идентификации, модель, последовательно соединенные объект идентификации и блок сравнения, вход модели подключен к входу объекта идентификации, а выход - к второму входу блока сравнения Ь 2 . Ограниченные функциональные возможности этой системы обусловлены тем, что она не может удовлетворительно справляться с вырожденными задачами параметрической идентификации, которые достаточно часто встречаются при построении адаптивных систем управления подвижными объектами,Особенности таких задач состоятв том, что из-за недостатка информации об идентифицируемом объекте су ществует целое множество моделейобъекта, одинаково хорошо позволяющих минимизировать сигнал невязки реакций модели и объекта.Рассмотрим в качестве примера ли нейную динамическую систему, замкнутую линейным законом управления: где Хе К - вектор состояния объекта;О е Кп - вектор управления;А и В ввещественные матрйцы соот ветствующих размерностей,характеризующих объект;Ь - вещественная матрицакоэффициентов линейногозакона управления.Ясно, чтб во всем фазовом пространстве К любое решение можно получить как решение однородной системыаналоговой техники, через вход коррекции происходит настройка ее пара метров. После этого вектор невязки на первом участке минимиэируется, коммутатор, переключает вход коррекции модели на канал долговременной 5 идентификации, а блок . запрета не пропускает на входы каналов оперативной и долговременной идентификации выборки исходных данных, уже не несущие информации. Поскольку в блоке памяти 10 ранее ничего не хранилось, то в результате работы канала долговременной идентификации оценка Сэ ничем на этом этапе не отличается от оценки Ср. Так продолжается до тех пор,пока система не выйдет на второй участок движения. Поскольку старая модель не в состоянии верно отобразить характер этого движения, то вектор невязки резко возрастает. Блок запрета пропускает новую выборку исходных данных на входы каналов оперативной и долговременной идентификации. Коммутатор снова переключается на канал оперативной идентификации, где быстро вырабатывается новая оценка С = (А . В+ ) После этого вектор невязкиуменьша-. ется и коммутатор снова переключается на канал долговременной идентификации. Канал долговременной идентификации работает параллельно оперативному, но к нему уже не предъявляется столь жестких требований относительно времени работы, поэтому во втором блоке реализаций алгоритмов идентификации может применяться более точный и сложный алгоритм параметрической идентификации.Блок б памяти организуется по принципу стековой памяти и может быть выполнен с помошью любого оперативного запоминающего устройства. Это означает что по мере поступления в него выборок старые выборки сдвигаютя в памяти, освобождая место новым, и по истечении конечного числа тактов,определяемого размерами памяти 1, старые выборки. вообще вытесняются иэ памяти. Такая структура позволяет адаптироваться к нестационарности параметров объекта идентификации за счет "обновления" памяти. С поступлением каждой . новой выборки Х и 0 в память включается смеситель 7. Функции этого блока несложны, он имеет доступ к каждой ячейке памяти, составляет обобщенную выборку из поступивших и хранящихся ранее в памяти выборок исходных. данных -5 и активизирует второй блок реализации алгоритмов идентификации. Эти функции можно реализовать с помощью устройства налогических элементах или с помощью цифрового вычислительного усг 60 ройства. В нашем случае в памяти хранится уже две выборки, принадлежащие первому и второму участку идентификации, поэтому второй блок реалиэации алгоритмов идентификации по обобщен ной выборке получает оценку С(Л", В )з,принадлежащую пересечению множествЯ и Я. Через коммутатор эта оценка поступает на вход коррекции модели 2. Таким образом работает система и при большем числе разнотипныхучастков движений,Повторяющиеся участки движения содинаковым множеством возможных моделей не вызывают уже рост вектораневязки, так как оценка принадлежитпересечению всех пройденных множест:,Это позволяет адаптироваться к избыточной информации и существенно экономить память.По получении наиболее общей оценки процессы идентификации в системемогут быть остановлены, так как блокзапрета блокирует доступ в память ненужной информации, канал долговременной идентификации уже переработал всюхранящуюся в памяти информацию, аканал оперативной идентификации выключен коммутатором. Это позволяетзначительно экономить вычислительныемощности (они могут быть освобождены для выполнения операций другогохарактера).Реализовать все указанные блокив системе можно с использованиемустройств самого разнообразного характера, в том числе и на базе цифровых вычислительных машин илимикропроцессоров совместно с аналоговой техникой.Таким образом, предлагаемая система имеет более широкую область применения за счет того, что может использоваться в случае вырожденных задач идентификации, которые часто встречаются при построении адаптивных систем управления подвижными объектами.Формула изобретенияСистема идентификации параметров объекта, содержащая первый блок реализации алгоритмов идентификации, модель, последовательно соединенные объект идентификации и блок сравнения, вход модели подключен к входу объекта идентификации, а выход - к второму входу блока сравнения, о т - л и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей, она содержит последовательно соединенные блок запрета, блок памяти, смеситель, второй блок реализации алгоритмов идентификации,коммутатор, вход и выход объекта идентификации подключены соответственно к первому и второму входам блока запрета, первый и второй выходы которого соединены соответственно с первым и вторым входами первого блокареализации алгоритмов идентификации,подключенного выходом к второмувходу коммутатора, второй, выход блока запрета через блок памяти и смеситель подключен к второму входу второго блока реализации алгоритмов 5идентификации, выход блока сравнениясоединен с управляквцими вкодами блока запрета и коммутатора, выход которого подключен к входу коррекциимодели.Источники информации,принятые во внимание при экспертизе1Авторское свидетельство СССР9 693342, кл. 6 05 В 23/02, 1979.2. Авторское свидетельство СССРЯ 703779, кл. С 05 В 13/02, 1980949635 Фи 8,едактор А. Лежни Заказ 5753/ атент", г. Уж л. Проектная,ал ВНИИПИ Го по делам13035, Мос оставитель В. Кузинехред К. Мыцьо Корректор С. Шекма Тираж 914 Йодписноарственного комитета СССРзобретений и открытиЯМ, Раушская наб , д, 4/5
СмотретьЗаявка
2998655, 28.10.1980
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БАЛОНИН НИКОЛАЙ АЛЕКСЕЕВИЧ, ЛЕОНТЬЕВ ОЛЕГ АЛЕКСАНДРОВИЧ, ПОПОВ ОРЕСТ СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: идентификации, объекта, параметров
Опубликовано: 07.08.1982
Код ссылки
<a href="https://patents.su/5-949635-sistema-identifikacii-parametrov-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Система идентификации параметров объекта</a>
Вычислительный блок к устройствам для измерения геометрических размеров объектов

Номер патента: 765641
Опубликовано: 23.09.1980
Авторы: Костенко, Суздальцев
МПК: G01B 7/02
Метки: блок, вычислительный, геометрических, объектов, размеров, устройствам
...и на его первой выходной шине появляется сигнал, в результате чего происходит опрос первого конъ.онктора блока 5 конъюнкторов.Если фотодатчик ФД 1 ( на чертеже не показан) находится в сработанном состоянии (поверхность измеряемой фигуры не находится в зоне действия этого датчика), то срабатывает первый конъюнктор блока 5 конъюнкторов,и на выходе дизъюнктора появляется сигнал, который через инвертор 9 закрывает конъюнкторО.Второй импульс с распределителя 8 поступает по шине Г 1 на вход конъюнктора 10, но не проходит на вход счетчика 7.Третий импульс с распределителя 8 поступает по шине 1 на вход коммутатора 3, от чего с шины 1 снимается, а по шине 11 появляется сигнал, и все повторяется сначала.Если в зоне действия фотодатчиков (ФД - ФДп)...
Устройство для ввода информации о параметрах объекта в электронную вычислительную машину

Номер патента: 526882
Опубликовано: 30.08.1976
Автор: Хлоповских
МПК: G06F 3/05
Метки: ввода, вычислительную, информации, машину, объекта, параметрах, электронную
...входом 36 счетчика 31 и через одновибратор 37 и формирователь 38 с входом 20 Запуск АЦП 6. Выход 14 Конец измерения АЦП 6 через формирователь 39, одновибратор 40, элементов И 41, управляемый триггером 34 цикла, и элемент ИЛИ 35 также подсоединен к счетному входу 36 счетчика 31. К счетчику 31 подключен дешифратор 42. Его выходы 15 соединены с ключами коммутатора 2 каналов. Кроме того, выход 17 подключен через буферный регистр 8 к разряду 18 приемного регистра ЭВМ 9, а выход 43 - к входу 44 усгановки триггера цикла в нуль.Работает устройство следующим образом, На вход 1 коммутатора 2 каналов поступают сипналы с датчиков параметров объекта. При подаче на вход 10 блока 11 управления сипхроимпульса с объекта, блок управления подключает...
Система автоматического регулирования

Номер патента: 442459
Опубликовано: 05.09.1974
МПК: G05B 17/02
...выходным лом которой является нвобхо переходный процесс, и на пе442459 3вход объекта оптимизации. Первый выход обьекта Оптимизации подключен к анализатору чувствительности и третьему входу вычислителя основНОго приращения параметров К пер вому и второму входам вычислителя Ь подключены соответственно выход эталонной модели и выход анализатора чувствительности 5 е Выходной сигнал анализатора 5 представляет 1 О собой Функции чувствительности выходного сигнала объекта оптимизации к настраиваемым параметрам регулятора. Сигнал второго выхода обьекта оптимизации, соответствующий сигналу управлейия, сравнивается в устроистве 7 с сигналом блока задания управляющего воздействия, При презыиении сигналом уп О равления велчины заданного управляющего...
Система идентификации параметров многомерного нелинейного динамического объекта
Номер патента: 1385122
Опубликовано: 30.03.1988
Авторы: Иванов, Перфильев, Цуканов, Шустов
МПК: G05B 13/02
Метки: динамического, идентификации, многомерного, нелинейного, объекта, параметров
...параметров ао т- (а, а, ,а ) и выдача этого значения вектора параметров на выход блока. Это значение поступает на соответствующие параметрические входы всех моделей 1 и 2, в результате че" го во всех моделях устанавливаются начальные значения параметров а .Ц=о 1 =1,ш). Причем в каждой 1-й вспомогательной модели 2 значение параметра а устанавливается с малым приращекием Л а;, поступающим на соответствующий сумматор 15 отклонений. После выставки заданных значений параметров во всек моделях системы на первом выходе блока 12 команд появляется кратковременный управляющий сигнал 11, поступающий на стартовые входы блока 7 вычисления функционала, всех блоков 8 вычисления частных производных, блока 11 контроля сходимости и блока 5 памяти. По...
Система идентификации параметров линейных объектов

Номер патента: 1534429
Опубликовано: 07.01.1990
Авторы: Параев, Цветницкая
МПК: G05B 13/02
Метки: идентификации, линейных, объектов, параметров
...через нормально эамк-.З 0утый контакт 60 реле 59, выход блоа 55 " с отдельным входом блока 56,выход которого соединен с одним иэвходов блока 57, вторым входом соединенного с выходом блока 6. С выходаблока 57 вектор параметров 6 черезключ поступает в блок 6 аналоговойпамяти. С выхода блока 57 вектор приращения параметров д 9 поступает влок задания начальных условий и блок 406 аналоговой памяти.Блок 8 формирования начальных условий (фиг, 5) состоит иэ матричного умножителя 61, на первый вход которогоподается У с выхода формирователя 5 45 Функций чувствительности, а на второй вход - 69 с отдельного выходавычислителя 4 параметров. Выход умно- жителя 61 соединен с одним из входовМатричного сумматора 62, другой входкоторого соединен с выходом...
Предыдущий патент: Многоканальный автоматический оптимизатор
Следующий патент: Схема для определения заданных точек на траектории
Случайный патент: Установка для горячего литья под давлением