Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
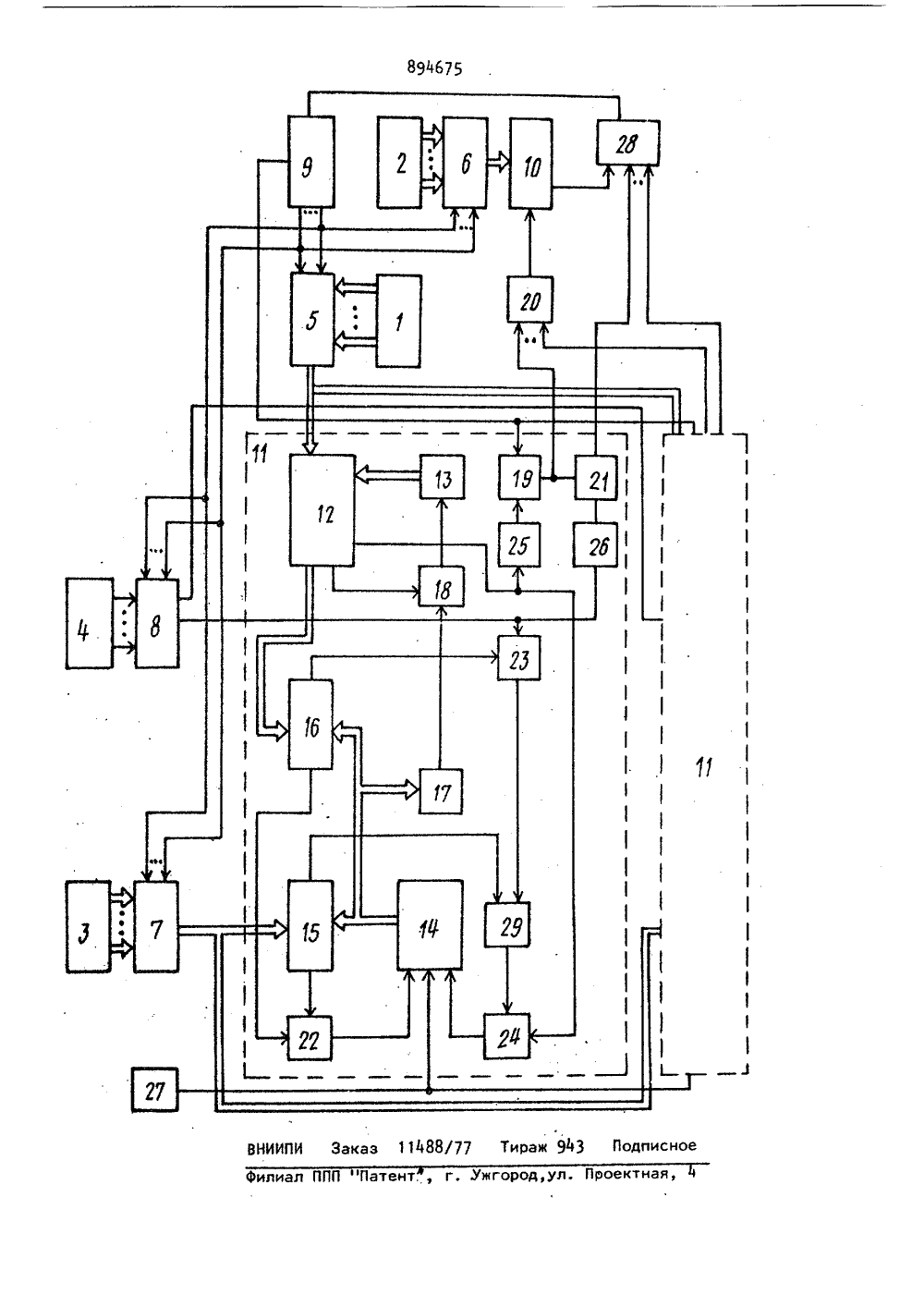
Оп ИСАНИЕ Союз СоветскикСоциалистическихРеспублик К ОаеС КОМУ СВИДЕТЕЛЬСТВУ 6 ) Дополнительное к авт, сеид-ву -22) Заявлено 06,02. 80 (21) 2879468/18-24 3)М. Кл. Ь 05 В 19/00 В 25 у 9/00 ением заявки М -сп ис ударстекииый комитет СССР делам иэобретеиий и открытий(71) Заявител енинградскии институт авиационного при 54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ Изобретение относится к робототехнике и может быть использовано присоздании устройств для программногоуправления промышленным роботом,Известно устройство для программного управления промышленным роботом, содержашее блок памяти, нульорган, блок управления и аналоговыесервосистемы 111.Недостаток этого устройства - низкая точность позиционирования,Наиболее близким к предлагаемомуявляется устройство, содержащеепервый блок памяти, соединенный выходами с первыми входами первого блока считывания, последовательно соединенные второй блок памяти, второйблок считывания и блок задержки, второй вход которого подключен к выходупервого элемента И, блок управления,первыми выходами соединенный со,вторыми входами первого и второго блоков считывания, а также по каждойрегулируемой координате последова- . тельна соединенные сумматор, первый элемент НЕ и триггер, второй выход сумматора подключен к первому входу привода, вторым входом соединенного с выходом цифро-аналогового преобра" зователя, а валом связанного с датчиком положения, выход которого подключен к первому входу сумматора, второй вход каждого из которых сое" динен с выходом первого блока считывания, второй выход блока управления подключен ко второму входу каждо" го триггера, выходами соединенных со входами первого элемента И.Недостатки известного устройства- невозможность программного изменения скорости движения манипулятора, а также необходимость обязательной остановки манипулятора для получения нового кадра, что приводит к невозможности плавного прохождения проме" жуточных точек позиционированияЦель изобретения - расширение функ циональных возможностей устройства, 8946Поставленная цель достигается тем,что устройство содержит генератор так.товых импульсов, первый элемент ИЛИ,последовательно соединенные третьиблок памяти и блок считывания посВледовательно подключенные четвертыеблок памяти и блок считывания и покаждой регулируемой координате вто"рой элемент НЕ, второй элеме т И ипоследовательно соединенные первыйблок сравнения, третий элемент И, реверсивный счетчик второй блок сравнения, четвертый элемент И, второйэлемент ИЛИ и пятый элемент И, вторым входом подключенный к первому выходу сумматора, а выходом - ко второму входу реверсивного счетчика, выход которого соединен со входом циФро"аналогового преобразователя и спервым входом первого блока сравнения,вторым выходом подключенного ко второму входу второго элемента ИЛИ, второй вход второго блока сравнения соединен с третьим входом сумматора, авторой выход - со вторым входом тре 2тьего элемента И, первые выходы блока управления подключены ко вторымвходам третьего и четвертого блоковсчитывания, выход генератора тактовыхимпульсов соединен с третьими входамизореверсивных счетчиков, выход третьего блока считывания подключен ко вторым входам первых блоков сравнения,выход четвертого блока считываниясоединен непосредственно со вторымивходами четвертых элементов И и через вторые элементы НЕ - с первым входом второго элемента И, второй входкаждого из которых подключен к выходу триггера, а выход - к первымвходам первого элемента ИЛИ, второйвход которого соединен с выходом блока задержки, а выход - со входом блока управления,На чертеже представлено устройство, Функциональная схема,Устройство содержит первый, вто"рой, третий и четвертый блоки 1-4 памяти соответственно, первый, второй. третий и четвертый блоки 5-8 считывания соответственно, блок 9 управления, блок 10 задержки, регулируемые координаты 11, сумматор 12, дат-чик 13.положения, реверсивный счетчик 14, первый и второй блоки 15 и16 сравнения соответстренно, цифро- уаналоговый преобразователь 17, привод18, триггер 19, первый, второй, третий, четвертый и пятый элементы И 2075424 соответственно, первый и второй элементы НЕ 25 и 26 соответственно, генератор 27 тактовых импульсов, первый и второй элементы ИЛИ 28 и 29 соответственно.Устройство работает следующим образом.Программа управления движением манипулятора содержит информацию о последовательности прохождения манипулятором точек позиционирования и хранится в блоке 9 управления. Информация о самих точках позиционирования хранится в соответствующих блоках 1-4 памяти и выдается для отработки на регулируемые координаты 11 и блок 10 выдержки в виде кадра по команде блока 9 управления. Текущая скорость движения каждой сте" пени подвижности манипулятора определяется кодом на выходе реверсивного счетчика 14. Этот код преобразуется цифро-аналоговым преобразователем 17 в аналоговый сигнал и передается на привод 18, Увеличение скорости определяется сигналом разрешения сложения на соответствующем входе реверсивного счетчика 14, а уменьшение сигналом разрешения вычитания тактовых импульсов, поступающих на счетный вход счетчика 4, Ускорение движения степени подвижности определяется частотой следования тактовых импульсов с выхода генератора 27. При необходимости возможно программное управление частотой этих импульсов, Прохождение точки позиционирования без остановки в ней организуется блоком 4 памяти признаков разрешения торможения и соответствующим блоком 8 считывания.Рассмотрим последовательность выполнения указанных операций.Блок 3 управления организует выдачу нового кадра при приходе соответствующей команды на его пусковой вход. При получении пускового сигнала блок 9 управления Формирует на втором выходе сигнал начальной установки, посылаемый на входы триггеров 19 для их сброса в исходное состояние. Кроме того, блок 9 формирует командные сигналы, посылаемые на управляющие входы блоков 5-8 считывания для выдачи информации из бло" ков 1-4 памяти соответственно данно" му кадру программы. При этом на второй вход первого блока .15 сравнения894675 поступает код программной скорости,на второй вход сумматора 12 поступает код программного положения соответствующей степени подвижности,на вход блока 10 задержки поступаеткод выдержки манипулятора в точкепозиционированИя и на входы элементов И 23 непосредственно и на входыэлемента И 21 через элементы НЕ 26лоступают с соответствующего выходаблока 8 считывания признаков разрешения торможения сигналы о наличии или сутствии признаков разрешения торможения по каждой степени, При этомпрограмма работы манипулятора формируется таким образом, что отсутствие признака торможения в кадре допускается толькопри одной степениподвижности,текущим значением скорости движениякаждой степени подвижности, програмным ее значением и значением рассогласования между программным значением положения степени подвижности,поступающим с выхода блока 5 считывания точек позиционирования на вторые входы сумматоров 12, и текущим чаются три режима работы устройства:разгон, движение с постоянной скоростью и торможениечто значение текущеи скорости некоторой степени, подаваемой с выходареверсивного счетчика 14 на первыевходы блоков 15 и 16 сравнения меньше программного значения скорости,подаваемого на второй вход блока 15сравнения и меньше значения рассогласования по этой степениподаваемого на второй вход блока 16 сравнения с выхода сумматора 12, При этомна первых выходах блоков 15 и 16 сравнения образуются сигналы, поступаю"щие через элемент И 22 на вход разрешения сложения реверсивного счетной степени. Режим торможения организуется при ненулевом рассогласовании на соответствующем сумматоре 12в двух случаях. В первом случае при дачу управляющих сигналов на вход разрешения вычитания реверсивного счетзначении текущей скорости, подаваемой на первый вход блока 16, неменьшем значения рассогласования поданной степени, подаваемого с выхода3 сумматора 12 на второй вход блока 16,при условии существования на входеэлемента И 23 сигнала разрешения торможения по этой степени. При этом напервом выходе блока 16 сравнения фор 16мируется сигнал, поступающий на входразрешения вычитания реверсивногосчетчика 14 через элементы И 23, ИЛИ 2 отсутствии признаков разрешения или от- и И 24 Во второмо втором случае режим торможения организуется, если значение1 текущей скорости подаваемой на первыйвход блока 15 сравнения, больше, чемзначение программной скорости, подаваемой на второй вход блока 15, Приэтом на втором выходе блока 15 форми 20 руется сигнал, поступающий на вход разВ зависимости от соотношения между решения вычитания реверсивного счетчика 14 через элементы ИЛИ 29 и 24,Содержимое реверсивного счетчика 14начинает уменьшаться с частотой генеИ ратора тактовых имупльсов 27, чтоприводит к снижению скорости движения данной степени подвижности мани"пулятора.При движении с постояннойскоростью на реверсивном счетчике 14 значением положения степеней, поступа- зв отсутствуют сигналы разрешения слоющим на первые входы сумматоров 12 с жения и вычитания, что определяет от" выходов датчиков 13 положения, разли- сутствие изменения содержимого реверсивного счетчика 14, В режиме движенив с постоянной скоростью возможу но прохождение некоторой степеньюРежим разгона характеризуется тем, промежуточной точки позиционирования.В этом случае сигнал с соответствующего выхода блока 8 считывания признаков разрешения торможения отсутств вует, что определяет запрет прохождения сигнала с первого выхода блока16 сравнения на вход разрешения вычитания реверсивного счетчикаСигнал на выдачу нового кадра Форми руется в двух случаях.Во-первых, при достижении всемистепенями заданного кадром положенияи отработке выдержки в точке позиционирования при наличии сигналовразрешения торможения в данном кадчика 14, При этом реверсивный счетчик ре для всех степеней подвижности ма начинает складывать поступающие нипулятора. При этом в момент досна его счетный вход тактовые импуль- тижения нулевого рассогласования по сы от генератора 27, тем самым уве- некоторой степени подвижности на выличивая текущую скорость движения дан- ходе нуля сумматора 12 этой степениФормируется сигнал, подаваемый навход элемента И 24 и запрещающий посо входами первого элемента И, о т "л и ч а ю щ е е с я тем, что, сцелью расширения функциональных возможностей устройства, оно содержитгенератор тактовых импульсов, первый элемент ИЛИ, последовательно соединенные третьи блок памяти и блоксчитывания, последовательно подключенные четвертые блок памяти и блоксчитывания, и по каждой регулируемойкоординате второй элемент НЕ, второйэлемент И и последовательно соединенные первый блок сравнения, третийэлемент И, реверсивный счетчик, второй блок сравнения, четвертый элемент И, второй элемент ИЛИ и пятыйэлемент И, вторым входом подключенныйк первому выходу сумматора, а выходомко второму входу реверсивного счетчика, выход которого соединен со входом цифро-аналогового преобразователяи с первым входом первого блока сравнения, вторым выходом подключенногоко второму входу второго элемента ИЛИвторой вход второго блока сравнениясоединен с третьим входом сумматора,а второй выход - со вторым входомтретьего элемента И, первые выходыблока управления подключены ко вторымвходам третьего и четвертого блокасчитывания, выход генератора тактовых импульсов соединен с третьимивходами реверсивных счетчиков, выход третьего блока считывания подключен ко вторым входам первых блоков сравнения, выход четвертого блока считывания соединен непосредственно со вторыми входами четвертых элементов И и через вторые элементы НЕс первым входом второго элемента И,второй вход каждого из которых подключен к выходу триггера, а выходк первым входам первого элемента ИЛИ,второй вход которого. соединен с выходом блока задержки, а выход - совходом блока управления.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРН 489627, кл. В 25,1 11/00 19752. Автбрское свидетельство СССРйф 620368, кл, В 25 1 9/00, 1978 (прототип). Формула изобретения 7 89 чика 14. Кроме того, этот сигнал через элемент НЕ 25 поступает на установочный вход триггера 19, который срабатывает и выдает сигнал на соответствующий вход элемента И 20. При срабатывании триггеров 19 всех степеней подвижности на выходе элемен"та И 20 Формируется сигнал, поступающий на управляющий вход блока 10выдержки, По отработке выдержки блок10 вырабатывает команду на выдачу следующего кадра,проходящую на пусковой вход блока 9 управления черезэлемент ИЛИ 2). Во втором случае сигнал на выдачу нового кадра формируется триггером 19 той степени под" вижности манипулятора, по которой отсутствует признак разрешения тормо. жения в данном кадре.В этом случае на втором входе элемента И 21 существует сигнал, поступающии с выхода блока 8 считывания признаков разрешения торможения через элемент НЕ 26 и сигнал от триггера 19 поступает на пусковой вход блока управления через соответствующий элемент И 21и элемент ИЛИ 28, При поступлении . пускового сигнала в блок 9 управления начинается новый цикл работы устройства управления,Применение изобретения позволит расширить функциональные возможности устройства за сцет обеспечения программного регулирования скорости перемещения координат. Устройство для программного управления промышленным роботом, содержащее первый блок памяти, соединенный выходами с первыми входами первого блока считывания, последовательно соединенные второй блок памяти, второй блок считывания и блок задержки второй вход которого подключен к выходу первого элемента И, блок управления, первыми выходами соединенный .со вторыми входами первого и второго блоков считывания, а также по каждой регулируемой координате последовательно соединенные сумматор, первый элемент НЕ и триггер, второй выход сумматора подключен к первому входу привода, вторым входом соединенного с выходом цифро-аналогового преобразователя, а валом связанного с датчиком положения, выход кото 10 15 20 25 30 35 40 45 50 55 рого подключен к первому входу сумматора, второй вход каждого из которых соединен с выходом первого блокасчитывания, второй выход блока управления подключен ко второму входу каждого триггера, выходами соединенных
СмотретьЗаявка
2879468, 06.02.1980
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
ЗАХАРОВ МАРК МИХАЙЛОВИЧ, КРИВУЛЕВ ВИКТОР АРКАДЬЕВИЧ, САКУН ЛЮДМИЛА ИВАНОВНА
МПК / Метки
МПК: G05B 19/00
Метки: программного, промышленным, роботом
Опубликовано: 30.12.1981
Код ссылки
<a href="https://patents.su/5-894675-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Многоканальное устройство для контроля блоков оперативной памяти

Номер патента: 960960
Опубликовано: 23.09.1982
Авторы: Бецков, Бороденко, Выпирайло, Пономаренко, Пшеничный, Стеценко, Черныш
МПК: G11C 29/00
Метки: блоков, многоканальное, оперативной, памяти
...выходах схем 11 и 12сравнения сигнал появляется при несовпадении записываемой и считаннойинформации относительно столбца (одного адреса) блоков 7 и 8, а на втоТехнико-экономическое преимущество предложенного устройства заключается в его более высокой, по сравнению с известным, надежности, а также в возможности одновременного контроля нескольких блоков оперативной памяти1 формула изобретения рых выходах - сигнал появляется при несовпадении записываемой и считанной информации относительно соответствующего цикла контроля.Сигналы с первых выходов схем 11 и 12 сравнения поступают на вторые 5 входы коммутаторов 15 и 16, с выхода которых в накопитель 36 передается адрес (номер столбца) блоков 7 и 8Сигналы со вторых выходов схем 11 и 12...
Осциллографическое устройство с электрическим считыванием информации

Номер патента: 728093
Опубликовано: 15.04.1980
Авторы: Авдеев, Богородский, Гендель
МПК: G01R 29/02
Метки: информации, осциллографическое, считыванием, электрическим
...блокирует генераторы 6 и 7 кадровой и строчнойразвертки считывания соответственнои усилитель считывания 9,При поступлении на вход устройства исследуемого сигнала.запускается генератор 3 и исследуемый сигналзаписывается и запоминается на мише"ййЗЭЛТ 2 в виде потенциальной до-рожки,Импульсом конца развертки записипоступающим в блок 5 управления,осуществляется перевод устройотвав режим построчного считывания,Приэтом блок 5 блокируетгенератор 3развертки записи, подключает выходгенератора 7 строчной разверткисчитывания через коммутатор 1 квертикально отклоняющим пластинамЗЭЛТ 2 и обеспечивает функционирование генераторов 6 и 7 строчнойи кадровой развертки считывания иблока 10 кодирования,Мишень ЗЭЛТ 2 сканируется растром со...
Электронный ключ

Номер патента: 1219772
Опубликовано: 23.03.1986
МПК: E05B 47/00, H03M 7/00
Метки: ключ, электронный
...на которые разбиваются коды соответствия и ключа, Маскирование данных кодов осуществляется в перемешивании этих элементов в зависимости от кода маскирования. Таким образом, установив на переключателях код коммутации, соответствующий коду маскирования, на выходе блока 13 декодирования получают истинные коды соответствия и ключа. Кроме установки кода коммутации осуществляется запись замаскированных кодов соответствия и ключа, а также кода количества использований ключа в блок 4 памяти. После этого ключ готов к работе.При состыковке ключа с замком на вход блока 1 управления поступают тактовые импульсы и он осуществляет считывание из олока 4 памяти кода количества использований ключа в счетчик 5. В счетчике 5 происходит вычитание единицы...
Оперативное запоминающее устройство

Номер патента: 1236551
Опубликовано: 07.06.1986
Автор: Невский
МПК: G11C 11/00
Метки: запоминающее, оперативное
...второму адресу, поступают на входы формирователя 3 адресных сигналов для возбуждения координатных обмоток накопителя 4. В результате на соответствующих координатных обмотках накопителя 4 выбраны запоминающие элементы, и на входы усилителя 5 считывания поступает второе слово, считанное в соответствии с адресом, пришедшим на вход 4.2. Второе слово с усилителя 5 считывания поступает на первый вход второго коммутатора 6.2, а с его выхода на второй регистр .2 слова, с выхода которого второе слово, считанное из накопителя 4, поступает на второй информационный выход 15,2 устройства.Установка исходного состояния регистров 1.1 и 1.2 осуществляется в начале каждого такта.При совпадении адресов (это соответствует и исходному состоянию,...
Информационно-вычислительная система

Номер патента: 506870
Опубликовано: 15.03.1976
Авторы: Днепровский, Караченцева, Кулинец, Лесневский, Семенков, Ярмош
МПК: G06F 17/30
Метки: информационно-вычислительная
...кайалов (так как одновременно в системе могут работать несколько пользователей с разных устройств оперативного ввода - вывода 10) передается по телефонным каналам связи 9 через блок связи 8 в блок управления 3, откуда через блок сопряжения 2 поступает в ЭВМ 1. В случае ввода алфавитно-цифровой информации код вводимого символа одновременно передается в знакогенератор 7, который начинает работать в режиме вывода алфавитно-цифровой информации, обеспечивая индикацию введенного символа на экране дисплея, входящего в состав устройств оперативного ввода - вывода 10. Обработав в соответствии с заложенным в нее комплексом 5 10 15 20 25 30 35 40 45 50 55 60 65 4программ введенную информацию ЭВМ 1 производит оперативный вывод пользователю...
Предыдущий патент: Следящая система поворота проектора кинотренажера
Следующий патент: Устройство для программного управления технологическими операциями
Случайный патент: Порошковый питатель