Устройство для идентификации параметров систем управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
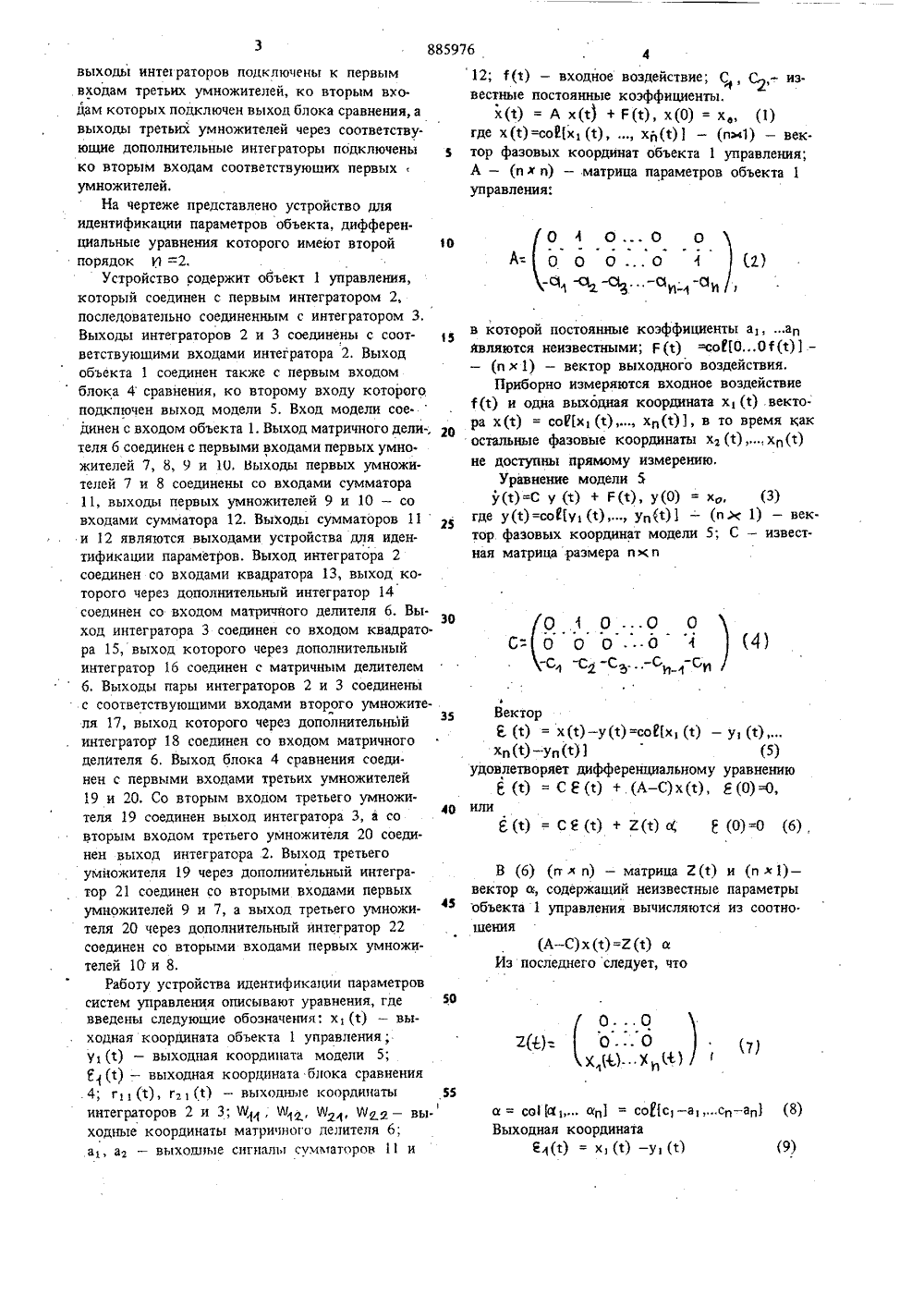
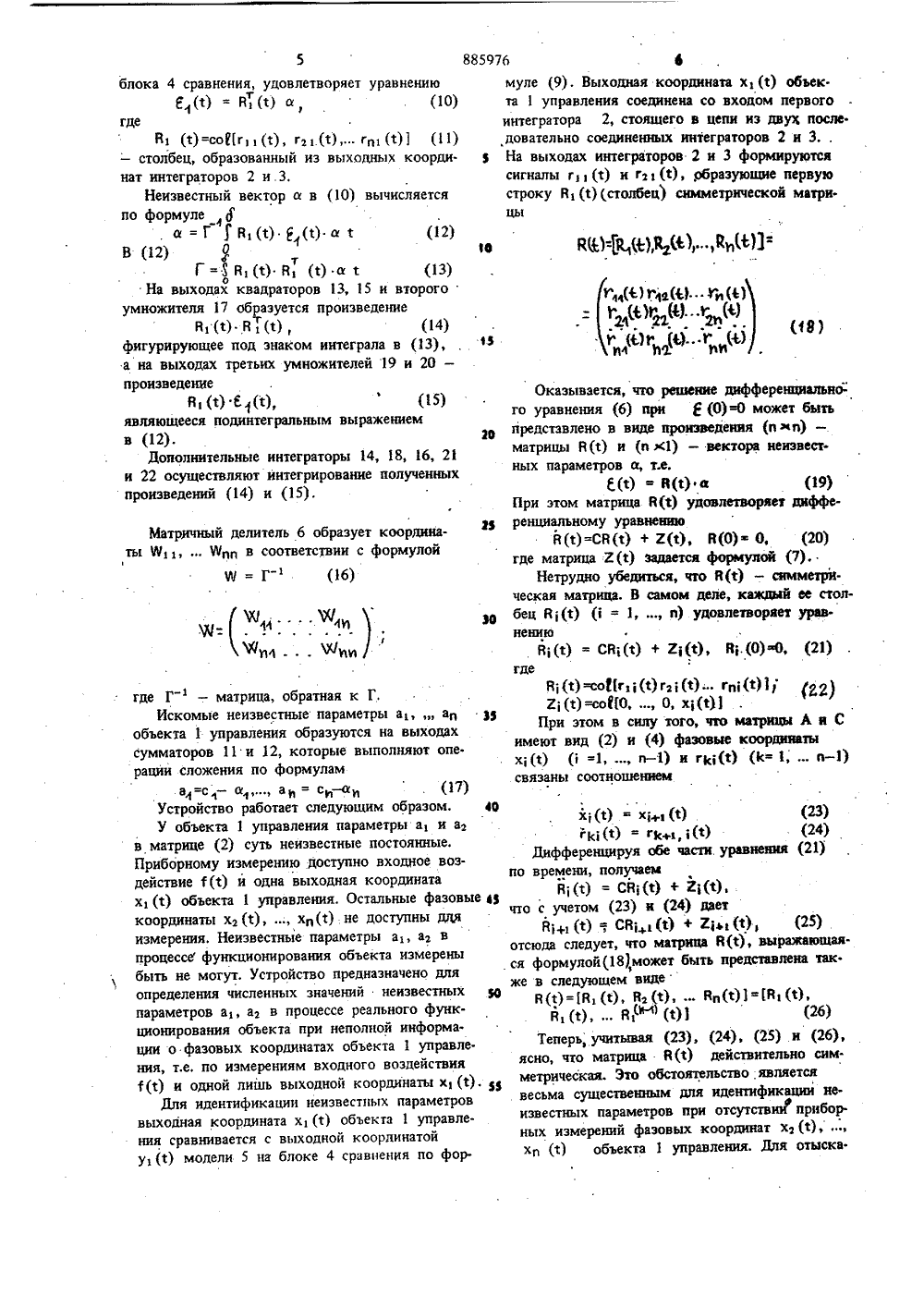
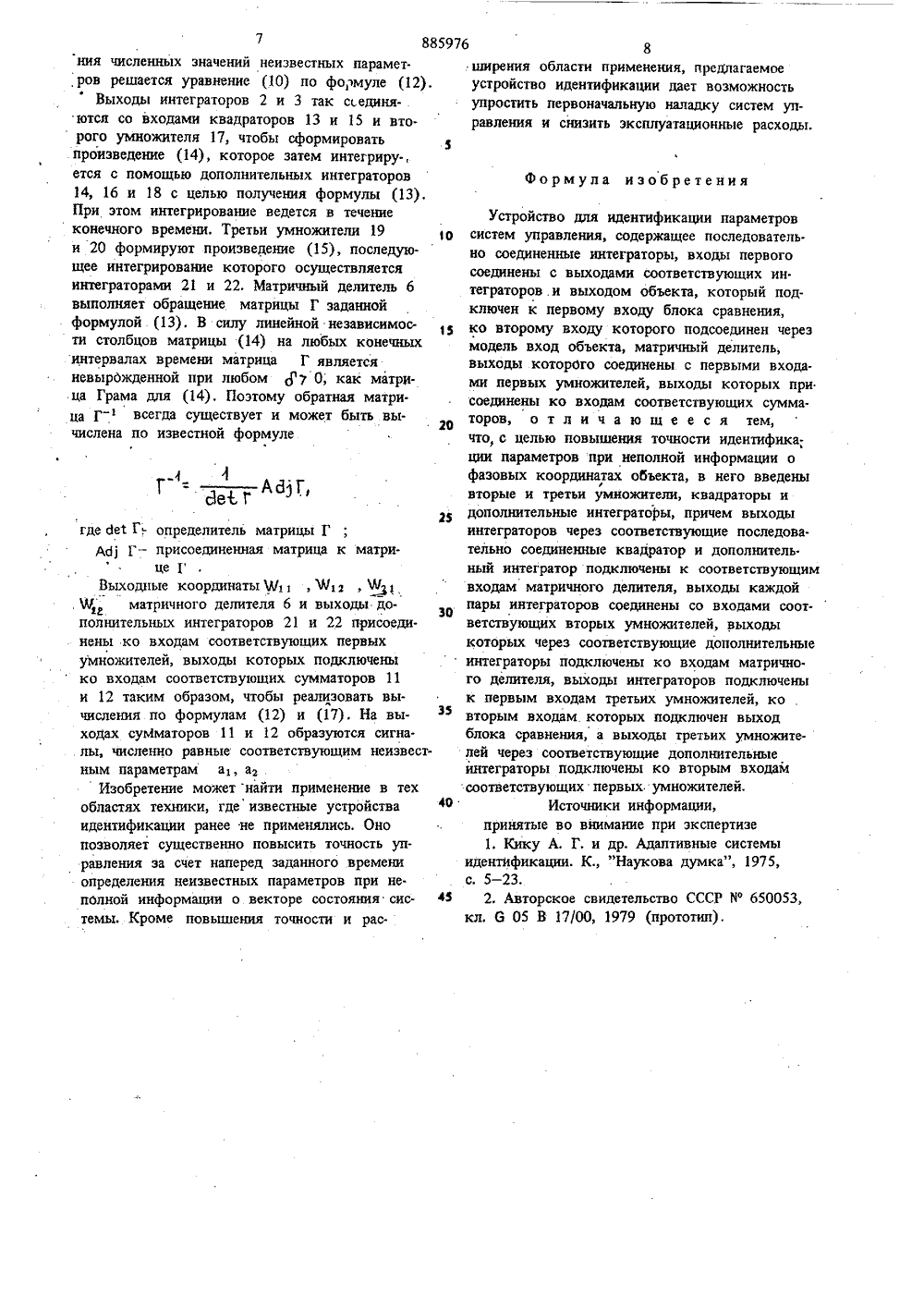
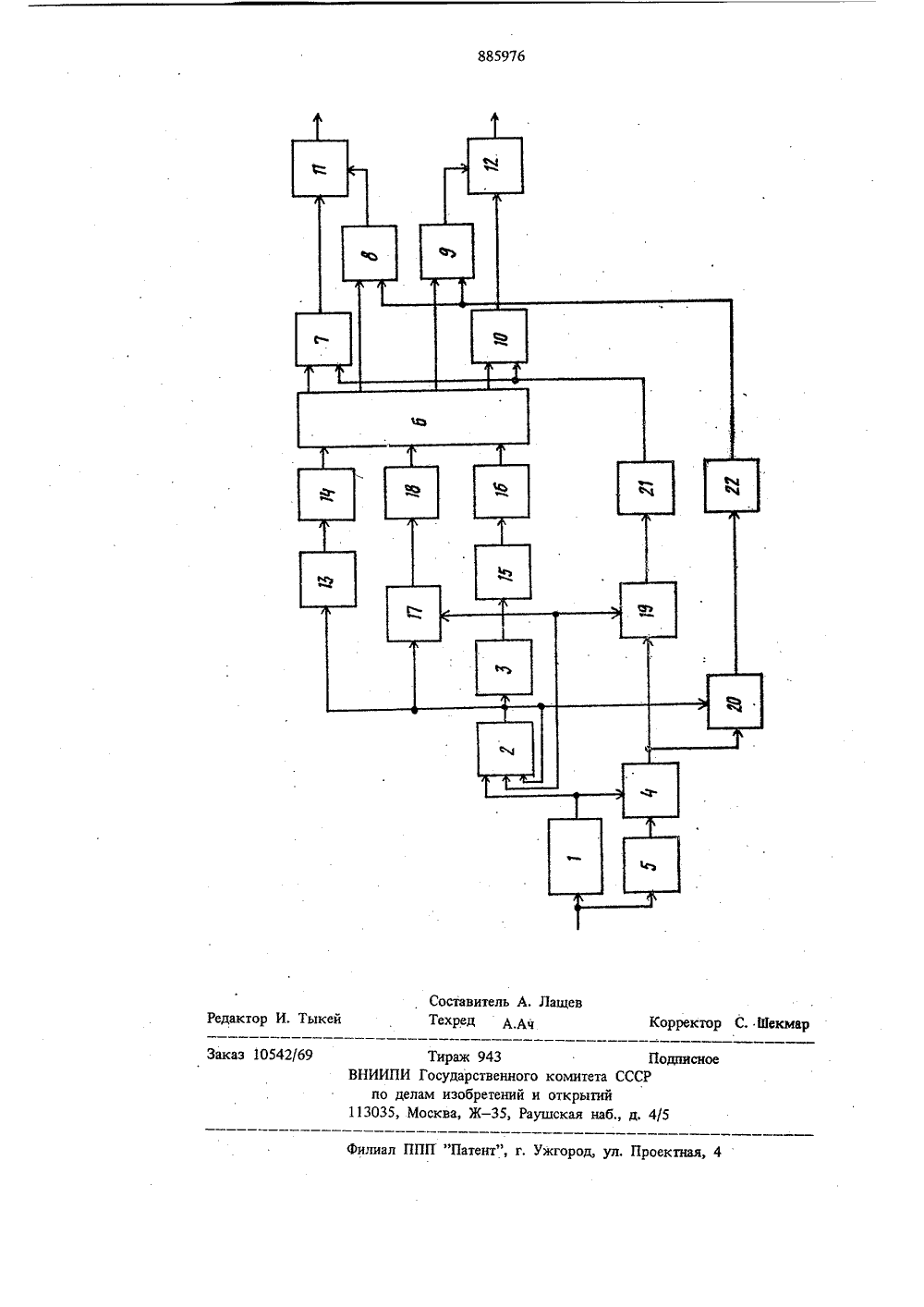
Союз СоветсииаСоциалнстнческнкРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(28) Приоритет -Опубликовано 30.11,81, Бюллетень Ме 44Дата опубликования описания 30,11.81 ле делам изобретеиий и еткрытий(088.8), О. Ю. Копысов н Б, И, Прокопов(72) Авторы изобретеиия Московский институт электронного мащиностроения(54) УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ СИСТЕМ УПРАВЛЕНИЯФИзобретение относится к автоматическомууправлению и регулированию и предназначенодля .идентификации неизвестных параметровэлектромеханическнх, электрических и радиотехнических систем различного назначенияИзвестны устройства идентификации парамет.ров систем управления, содержащие. модель,.блоки сравнения, сумматоры, интеграторы иумножителн 1).Известные устройства идентификации обладают недостаточно высокой точностью вычисления1 Онеизвестных параметров при изменении вида(амплитуды и формы) управляющего воздействия в условиях неполной информации о фазовых координатах объекта управления (т,е, когданекоторые фазовые координаты недоступныприборному измерению),Наиболее близким к предлагаемому является устройство, содержащее последовательно соединенные интеграторы, входы первого соедине 20ны с выходами соответствующих интеграторови выходом объекта, который подключен кпервому входу блока сравнения, ко второмувходу которого подсоединен через модель вход объекта, матричный делитель, выходы которогосоединены с первыми входами первых умножи.телей, выходы которых присоединены ко вхо.дам соответствующих сумматоров 2) .Недостатком известного устройства является невысокая точность идентификации парамет.ров при неполной информации о фазовых ко.ординатах объекта,Цель изобретения - повыщение точностиидентификации параметров при неполной информации о фазовых координатах объекта,Поставленная цель достигается тем, что вустройство для идентификации параметров систем управления введены вторые н третьи умно.жители, квадраторы и дополнительные интеграторы, причем выходы интеграторов через соот.ветствующие последовательно соединенныеквадратор и дополнительный интегратор подключены к соответствующим входам матричного делителя, выходы каждой пары интеграторов соединены со входами соответствующихвторых умножителей, выходы которых черезсоответствующие дополнительные интеграторыподключены ко входам матричного делителя,885976 412; 1(с) - входное воздействие; С, С,- известные постоянные коэффициенты.х(с) = А х(с) + Е(с), х(0) = х(1)где х(с) =соЕх (с) хй(с)1 - (пм 1) - век 5 тор фазовых координат объекта 1 управления;А - (их и) - матрица параметров объекта 1управления: Ф З 5 Вектор(с) = х(с)-у(с)-соЕ., (с) у, (с),. хп (С) - Уп (с) 1 (5) удовлетворяет дифференциальному уравнению Е (с) = С Я (с) + (А - С) х (с), Я (О) 4),40 или Я (с) = С(с) + Е (с) а,(О) =0 (6), выходы инте раторов подключены к первымвходам третьих умножителей, ко вторым вхоСдам которых подключен выход блока сравнения, авыходы третьих умножителей через соответствующие дополнительные интеграторы подключеныко вторым входам соответствуюших первыхумножителей,На чертеже представлено устройство дляидентификации параметров объекта, дифферен.циальные уравнения которого имеют второй 0порядок И =2.Устройство содержит объект 1 управления,который соединен с первым интегратором 2,последовательно соединенным с интегратором 3.Выходы интеграторов 2 и 3 соединены с соответствуюшими входами интегратора 2. Выходобъекта 1 соединен также с первым входомблока 4 сравнения, ко второму входу которого,подключен выход модели 5. Вход модели соединен с входом объекта 1, Выход матричного дели; р 0теля б соединен с первыми входами первых умно.жителей 7, 8, 9 и 10, Выходы первых умножителей 7 и 8 соединены со входами сумматора11, выходы первых умножителей 9 и 10 - совходами сумматора 12. Выходы сумматоров 115и 12 являются выходами устройства для идентификации параметров, Выход интегратора 2соединен со входами квадратора 13, выход которого через дополнительный интегратор 14соединен со входом матричного делителя б. Выход интегратора 3 соединен со входом квадратора 15, выход которого через дополнительныйинтегратор 16 соединен с матричным делителемб, Выходы пары интеграторов 2 и 3 соединеныс соответствующими входами второго умножите- .ля 17, выход которого через дополнителыщйинтегратор 18 соединен со входом матричногоделителя 6. Выход блока 4 сравнения соединен с первыми входами третьих умножителей19 и 20. Со вторым входом третьего умножителя 19 соединен выход интегратора 3, а совторым входом третьего умножителя 20 соединен выход интегратора 2. Выход третьегоумножителя 19 через дополнительный интегратор 21 соединен со вторыми входами первыхумножителей 9 и 7, а выход третьего умножителя 20 через дополнительный интегратор 22соединен со вторыми входами первых умножителей 10 и 8.Работу устройства идентификации параметровсистем управления описывают уравнения, где 50введены следующие обозначения; х, (с) - выходная координата объекта 1 управления;у (с) - выходная координата модели 5;ЯЛ(с) - выходная координата блока сравнения4; г (с), г(с) - выходные координаты 55интеграторов 2 и 3; ЗЛЛ, В,2, В ууходные координаты матричного делителя 6:а а 2 - выходные сигналы сумматоров И и 0 Л ОО О0 0 0 О Л (2) -4-С-О-аИ-Л -С 1 И в которой постоянные коэффициенты а а являются неизвестными; Р(с) =соЕООФ(с)1 -- (пх 1) - вектор выходного воздействия.Приборно измеряются входное воздействие Х(с) и одна выходная координата х, (с) вектора х(с) = соЕх, (с) хи(с) 3, в то время как остальные фазовые координаты х (с), хп(с) не доступны прямому измерению.Уравнение модели 5у(с)=С у (с) + Р(с), у(0) = хо, (3) где у(С)=соЕу, (С) уп(С - (пс 1) - вектор фазовых координат модели 5; С - известная матрица размера и к и 0О 0 0 С= О ООО Л (4)-С-С -С-С-С,В (6) (и х п) - матрица Е(с) и (и х 1) -вектор а, содержаший неизвестные параметры объекта 1 управления вычисляются из соотно шения885976 Фмуле (9). Выходная координата х, (с) объек.та 1 управления соединена со входом первого интегратора 2, стоящего в цепи из двух последовательно соединенных интеграторов 2 и 3 На выходах интеграторов 2 и 3 формируются сигналы г (с) и гз 1(с), рбразующие первую строку В, (с) (столбец) симметрической матри- ЦЫ О 8) 20 З= % М, сй -. си где Г- матрица, обратная к Г.Искомые неизвестные параметры а, ап И объекта 1 управления образуются на выходах сумматоров 11 и 12, которые выполняют опе. рации сложения по формулама=с - а а = сй - а 1(17)Устройство работает следующим образом. 4 оУ объекта 1 управления параметры а, и а в матрице (2) суть неизвестные постоянные. Приборному измерению доступно входное воздействие 1(с) и одна выходная координата х, (с) объекта 1 управления. Остальные фазовые 4 у координаты х,(с), хп(с) не доступны для измерения, Неизвестные параметры а а в процессе функционирования объекта измерены быть не могут, Устройство предназначено для определения численных значений неизвестных йййй параметров а а в процессе реального функционирования объекта при неполной информации о фазовых координатах объекта 1 управле. ния, т,е, по измерениям входного воздействия г(с) и одной лишь выходной координаты х, (с),Для идентификации неизвестных параметров выходная координата х, (с) объекта 1 управления сравнивается с выходной координатой у,(с) модели 5 на блоке 4 сравнения по форблока 4 сравнения, удовлетворяет уравнениюЯ (с) = В 1(с) а,. (10)гдеВ 1 (с) =соРг, 1 (с), г, (с), г, (с)(1 1)- столбец, образованный из выходных координат интеграторов 2 и 3.Неизвестный вектор а в (10) вычисляетсяпо формулеа =ГВ,(с) Я(с) а с (12)В (12) УГ=3 В,(с) В, (с) а с (13)На выходах квадраторов 13, 15 и второгоумножителя 17 образуется произведениеВ (с) В (с) (14)фигурирующее под знаком интеграла в (13),а на выходах третьих умножителей 19 и 20 -произведенией, (с) Е .(с), (15)являющееся подинтегральным выражениемв (12),Дополнительные интеграторы 14, 18, 16, 21и 22 осуществляют интегрирование полученныхпроизведений (14) и (15),Матричный делитель 6 образует координаты В,Впд в соответствии с формулой 116 = Г(16) Оказывается, что решение дифференциального уравнения (6) при Е (0)=0 может быть представлено в вцце произведения (пфп) - матрицы В(с) и (и к 1) - вектора неизвестных параметров а, т.е.Цс) = Й(с) а (19) При этом матрица Й(С) удовлетворяет дифференциальному уравнениюВ(г) =СВ(с) + 2(с), В(0)- О, (20) где матрица 2(с) задается формулой (7).Нетрудно убедиться, что Й(с) - сямметри. ческая матрица. В самом деле, каждый ее столбец В;(с) (й = 1, , и) удовлетворяет урав. нениюВ;(с) = СВ;(с) + гй(с), В;.(0)-О, (21) гдеВ(с) сог,г 11(с) гзй(с)- гпй(с) й р 2)2;(с) =сос 0, , О, хй(с)При этом в силу того, что матрицы А а С имеют вид (2) и (4) фазовые координаты х;(с) (й 1, , и - 1) и гйсй(с) (йс= 1,и - 1) связаны соотношением х;(с) = хй+,(с) (23)гйсй(с) = гйс+в, й(с) (24)дифференцируя обе части. уравнения (21)по времени, получаемВ;(с) = СВ;(с) + 21(с),что с учетом (23) и (24) даетВй+1 (с) = Сйй,л(с) + 2 йн(с)у (25)отсюда следует, что матрица Й(с), выражающаяся формулой(18),может быль представлена так.же в следующем видеВ(с)=В,(с), В,(с),В(с)=В,(с),В,Ом) (с)Теперь,учитывая (23), (24), (25) и (26),ясно, что матрица В(с) действительно симметрическая. Это обстоятельство являетсявесьма существенным для идентификации неизвестных параметров при отсутствиифприбор.ных измерений фазовых координат х(с) .,хп (с) объекта 1 управления. Для отыска885976 8ширения области применения, предлагаемоеустройство идентификации дает возможностьупростить первоначальную наладку систем управления и снизить эксплуатационные расходы.5 ния численных значений неизвестных параметров решается уравнение (10) по формуле (12)Выходы интеграторов 2 и 3 так соединя-. ются со входами квадраторов 13 и 15 и второго умножителя 17, чтобы сформировать произведение (14), которое затем интегриру-, ется с помощью дополнительных интеграторов 14, 16 и 18 с целью получения формулы (13). При этом интегрирование ведется в течение конечного времени. Третьи умножители 19 и 20 формируют произведение (15), последующее интегрирование которого осуществляется интеграторами 21 и 22. Матричный делитель 6 выполняет обращение матрицы Г заданной формулой (13). В силу линейной независимое. ти столбцов матрицы (14) на любых конечных интервалах времени матрица Г является невырджденной при любом Д 7 О, как матрица Грама для (14). Поэтому обратная матри. ца Г- всегда существует и может быть вычислена по известной формуле г = - д;г,де 1 Ггде дет Г; определитель матрицы Гдд Г - присоединенная матрица к матрице ГВыходные координаты %11, %1 з , Ф матричного делителя 6 и выходы до 1 гполнительных интеграторов 21 и 22 присоеди иены ко входам соответствующих первых умножителей, выходы которых подключены ко входам соответствующих сумматоров 11 и 12 таким образом, чтобы реализовать вы числения по формулам (12) и (17), На выходах суМматоров 11 и 12 образуются сигна. лы, численно равные соответствующим неизвестным параметрам аа 2Изобретение можетнайти применение в тех областях техники, где известные устройства идентификации ранее не применялись, Оно позволяет существенно повысить точность управления за счет наперед заданного времени определения неизвестных параметров при не. полной информации о векторе состояния системы. Кроме повышения точности и расФормула изобретения Устройство для идентификации параметров1 О систем управления, содержащее последовательно соединенные интеграторы, входы первогосоединены с выходами соответствующих ин.теграторов.и выходом объекта, который подключен к первому входу блока сравнения,1 ко второму входу которого подсоединен черезмодель вход объекта, матричный делитель,выходы которого соединены с первыми входами первых умножителей, выходы которых присоединены ко входам соответствующих сумматоров, отличающееся тем,что, с целью повышения точности идентификации параметров при неполной информации офазовых координатах объекта, в него введеныФвторые и третьи умножители, квадраторы идополнительные интеграторы, причем выходыинтеграторов через соответствующие последовательно соединенные квадратор и дополнитель.ный интегратор подключены к соответствующимвходам матричного делителя, выходы каждойпары интеграторов соединены со входами соответствующих вторых умножителей, выходыкоторых через соответствующие дополнительныеинтеграторы подключены ко входам матрично.го делителя, выходы интеграторов подключенык первым входам третьих умножителей, ковторым входам. которых подключен выходблока сравнения, а выходы третьих умножителей через соответствующие дополнительныеинтеграторы подключены ко вторым входамсоответствующих первых. умножителей,40 Источники информации,принятые во внимание при экспертизе1, Кику А, Г, и др, Адаптивные системыидентификации, К "Наукова думка", 1975,с. 5 - 23,4 З 2, Авторское свидетельство СССР И 650053,кл. 6 05 В 17/00, 1979 (прототип)./5 лиал ППП "Патент", г, Ужгород, ул, Проектнал НИИ по 13035Тираж 943 Государственного ам изобретений и Москва, Ж - 35, Раушомитета ССткрытийскал наб д
СмотретьЗаявка
2861636, 29.12.1979
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
КОПЫСОВ ОЛЕГ ЮРЬЕВИЧ, ПРОКОПОВ БОРИС ИВАНОВИЧ
МПК / Метки
МПК: G05B 23/00
Метки: идентификации, параметров, систем
Опубликовано: 30.11.1981
Код ссылки
<a href="https://patents.su/5-885976-ustrojjstvo-dlya-identifikacii-parametrov-sistem-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для идентификации параметров систем управления</a>
Система идентификации параметров линейных объектов

Номер патента: 1534429
Опубликовано: 07.01.1990
Авторы: Параев, Цветницкая
МПК: G05B 13/02
Метки: идентификации, линейных, объектов, параметров
...через нормально эамк-.З 0утый контакт 60 реле 59, выход блоа 55 " с отдельным входом блока 56,выход которого соединен с одним иэвходов блока 57, вторым входом соединенного с выходом блока 6. С выходаблока 57 вектор параметров 6 черезключ поступает в блок 6 аналоговойпамяти. С выхода блока 57 вектор приращения параметров д 9 поступает влок задания начальных условий и блок 406 аналоговой памяти.Блок 8 формирования начальных условий (фиг, 5) состоит иэ матричного умножителя 61, на первый вход которогоподается У с выхода формирователя 5 45 Функций чувствительности, а на второй вход - 69 с отдельного выходавычислителя 4 параметров. Выход умно- жителя 61 соединен с одним из входовМатричного сумматора 62, другой входкоторого соединен с выходом...
Адаптивное устройство для управления объектом с присоединенным упругим элементом

Номер патента: 1297020
Опубликовано: 15.03.1987
МПК: G05B 15/02
Метки: адаптивное, объектом, присоединенным, упругим, элементом
...терминального управления будет 1 з р". (7)Величина нагружающей силы на втором участке определяется выражением5 12970ц з ( , Ч ), (8)Ь оэ с 1По достижении упругим элементоммалой окрестности точки динамического равновесия алгоритм терминального управления вьцслючается и объектнагружается силой Б=ПАналогично можно рассмотреть этапразгружения. Необходимо только положить Б = - НмУт =О. Траектория движения фазовой точки в этомслучае показана на Фиг. 3 пунктиром,Объединяя оба этапа (нагружение иразгружение), можно представить алгоритм управления в следующем видеНИ)=О 8 Е ,3+8 И) (1-91 а-Д) 8 ГЫ,1+"ъ=1 Ч.ФЬ 0),Устройство работает следующим образом,Текущие значения обобщенной координаты колебаний упругого элемента с 1 снимаются с выхода...
Устройство для измерения угловых деформаций объекта

Номер патента: 1408206
Опубликовано: 07.07.1988
МПК: G01B 7/30
Метки: деформаций, объекта, угловых
...объекта.Устройство для измерения угловых деформаций объекта содержит три однокомпонентных измерителя 1 -3 напряженности магнитного поля, например три феррозонда с диапазоном измерения, соответствующим напряженности магнитного поля Земли, два умножителя 4 и 5, алгебраический сумматор 6 и интегратор 7. Выходы основного измерителя 1 и первого дополнительного измерителя 2 соединены с первыми двумя входами сумматора 6, выход второго дополнительного измерителя 3 соединен с первыми входами обоих умножителей 4 и 5, выход первого умножителя 4 соединен с третьнч входом сумматора 6, выход второго умцожителя 5 соединен с входом интегратора 7, выход интегратора 7 соединен с вторым входом первого умножителя 4, а выход сумматора 6 - с вторым входом...
Устройство для определения параметров движителей транспортного средства

Номер патента: 1735733
Опубликовано: 23.05.1992
Авторы: Ибрагимов, Таневицкий, Федотов
МПК: G01M 17/02
Метки: движителей, параметров, средства, транспортного
...одновременно с задатчиком угла увода задней оси транспортного средства подключен к дополнительному блоку деления, выход которого соединен с регистрирующей аппаратурой,На фиг.1 представлена расчетная схема движения двухосного транспортного средства; на фиг.2 - блок-схема устройства для определения коэффициентов сопротивления боковому уводу шин осей транспортного средства,Устройство для определения. коэффициентов сопротивления боковому уводу шин осей транспортногО средства содержит датчик 1 поперечного ускорения транспортного средства (фиг.2;г, установленный в центре тяжести транспортного средства и задатчик 2 массы транспортного средства, выходы которых соединены с основным блоком 3. перемножения. Выход блока 3 перемножения и выход...
Следящий умножитель частоты

Номер патента: 447721
Опубликовано: 25.10.1974
Авторы: Гутников, Недашковский, Толчинский
МПК: G06G 7/16
Метки: следящий, умножитель, частоты
...ФИЛИ 4 поступаетединичный разрешающий потенциал, ключ 2закрыт нулевым потенциалом с выходасхемы "ИЛИ 5, и последний триггер счетчика 3 находится в нулевом состоянии, аследовательно, опорное напряжение О неподается на вход интегратора 7. На выходе управляемого генератора 9 формируются импульсы выходной частоты, равной,например, величинеВходные импульсы частоты 1заполняют счетчик 3, и в некоторый моментвремени последний триггер счетчика устанавливается в единичное состояние, закрывая при этом ключ 1, Интегратор 7 через ключ-формирователь 6 начуйает интегрировать опорное напряжение 0 , чтоприводит к изменению выходйой частотыуправляема о генератора 9,Поступающие на вычитаюший вход счетчика 3 импульсы обратной связи. частотыкомпенсируют...
Предыдущий патент: Интерполятор
Следующий патент: Устройство для управления бесперекосным движением гидротехнического затвора
Случайный патент: Способ очистки природного газа от сероводорода