Промышленный робот модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
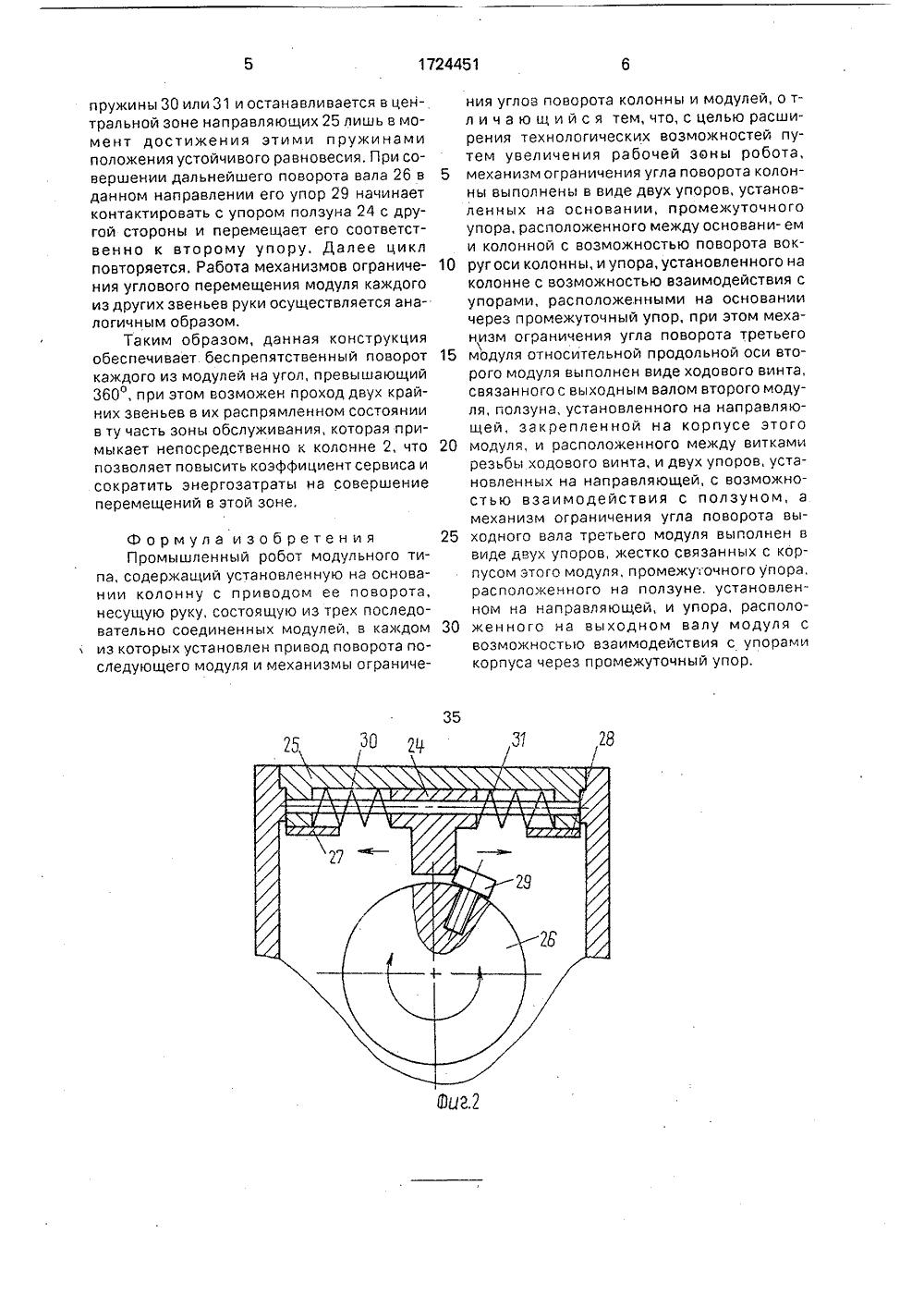
.Л.Иванов (ВО) 980 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИПРИ ГКНТ СССР АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) ПРОМЫШЛЕННЫЙ РОБОТ МОДУЛЬНОГО ТИПА(57) Изобретение относится к машиностооению, а именно к робототехнике, в частности к роботам модульного типа с ЧПУ, применяемым для механизации и автоматизации вспомогательных технологических операций. Цель изобретения - расширение технологических возможностей путем увеличения рабочей зоны робота. Наличие на поворотныхх звеньях робота механизмов 7-9 ограничения их углового перемещения, в которых использован промежуточный элемент между упором перемещаемого звена и упором, ограничивающим перемещение, обеспечивает беспрепятственный поворот звеньев10 15 Изобретение относится к машиностроению, а именно к робототехнике, в частности к роботам модульного типа с ЧПУ, применяемым для механизации и автоматизации вспомогательных технологических операций.Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны робота.На фиг.1 изображен робот, общий вид; на фиг,2 - механизм ограничения угла поворота выходного вала третьего модуля руки; на фиг.3 - то же, второго модуля; на фиг,4 - то же, колонны.Робот содержит основание 1, на котором смонтирована поворотная колонна 2, несущая трехзвенную руку 3, состоящую из последовательно соединенных модуля 4 первого звена, модуля 5 второго звена и модуля 6 ротации (третье звено руки). При этом длина модуля 4 первого звена больше суммы длин двух последующих модулей 5 и б, т.е.45 + 16На модуле каждого предыдущего звена смонтирован привод углового перемещения модуля каждого последующего звена руки, Так, на основании 1 смонтирован привод поворота руки 3, на модуле 4 первого звена которой смонтирован привод поворота второго звена 5, а на нем - привод поворота модуля 6 ротации. Каждое из перечисленных звеньев содержит также и механизмы 7 - 9 ограничения углового перемещения. Механизм ограничения угловых перемещений руки 3 вместе с колонной 2 выполнен конструктивно в виде упора 10, установленного на подвижной колонне 2, взаимодействующего с промежуточным упором 11, размещенным в направляющих 12, выполненных в основании 1 и расположенных в плоскости, перпендикулярной оси вращения колонны 2. В крайних зонах направляющих 12 закреплены регулируемые упоры 13 и 14, взаимодействующие с упором 11, Там же установлены и конечные выключатели 15 и 16, отключающие электропривод при подходе руки 3 с колонной 2 к заданной позиции посредством воздействия упора 11 на соответствующий конечный выключатель 15 или 16.Междуупором 11 и основанием 1 смонтирован упругий возвратный элемент - пружина 17, предназначенная для отвода упора 11 от выключателей 15 и 16. Механизм ограничения углового перемещения модуля 6 третьего звена руки выполнен в виде ползуна 18, смонтированного в направляющих 19, выполненных на модуле 5 второго звена и расположенных параллельно оси враще 20 25 30 35 40 45 50 55 ния звена (модуля) 6, На этих направляющих 19 закреплены регулируемые упоры 20 и 21, с которыми взаимодействует ползун 18, С валом 22 привода модуля 6 связан ходовой винт 23, между витками которого расположен ползун 18. Последний из механизмов ограничения угловых перемещений смонтирован на третьего звене - модуле б ротации и представляет собой промежуточный упор, расположенный на ползуне 24, установленном в направляющих 25, расположенных в плоскости, перпендикулярной оси вращения вала 26 (в данном случае это вал захватного устройства).На направляющих 25 закреплены регулируемые упоры 27 и 28, взаимодействующие с упором, с которым взаимодействует также упор 29, закрепленный на валу 26. С каждой стороны упора, между ним и корпусом этого звена закреплены возвратные пружины 30 и 31, устанавливающие упор в его центральное положение относительно направляющих 25, что соответствует положению устойчивого равновесия системы пру жин 30 и 31.Устройство работает следующим образом,При подаче сигнала по программе от устройства ЧПУ происходит при необходимости относительное угловое перемещение всех звеньев робота. При достижении этими звеньями предельных (в угловом отношении) положений срабатывают конечные выключатели, но при их отсутствии или при работе без программных ограничений (в ручном режиме) вращение может продолжаться (при отсутствии механизмов ограничения) вплоть до поломки какой-либо из систем робота. Срабатывание всех механизмов ограничения перемещения происходит одинаково, поэтому этот процесс целесообразно рассмотреть на примере работы механизма ограничения угла поворота выходного вала 26. Закрепленный на нем упор 29 контактирует с упором ползуна 24 и перемещает его по направляющим 25 до его контакта с одним из регулируемых упоров 27 или 28. Поскольку взаимодействие соответствующего подвижного элемента звена (вала 26) с регулируемым упором осуществляется через дополнительное передаточное устройство (через его элемент - ползун 24), то к угловому перемещению вала 26 добавляется еще перемещение и ползуна 24, так что общий ход последующего звена относительно предыдущего значительно увеличивается.При обратном вращении последующего звена 26 (от регулируемого упора 27 или 28) ползун 24 следует за ним под действием1724451 35 28 иг.2 пружины 30 или 31 и останавливается в центральной зоне направляющих 25 лишь в момент достижения этими пружинами положения устойчивого равновесия. При совершении дальнейшего поворота вала 26 в данном направлении его упор 29 начинает контактировать с упором ползуна 24 с другой стороны и перемещает его соответственно к второму упору. Далее цикл повторяется. Работа механизмов ограничения углового перемещения модуля каждого из других звеньев руки осуществляется аналогичным образом.Таким образом, данная конструкция обеспечивает беспрепятственный поворот каждого из модулей на угол, превышающий 360, при этом возможен проход двух крайних звеньев в их распрямленном состоянии в ту часть зоны обслуживания, которая примыкает непосредственно к колонне 2, что позволяет повысить коэффициент сервиса и сократить энергозатраты на совершение перемещений в этой зоне. Формула изобретения Промышленный робот модульного типа, содержащий установленную на основании колонну с приводом ее поворота, несущую руку, состоящую из трех последовательно соединенных модулей, в каждом из которых установлен привод поворота последующего модуля и механизмы ограничения углов поворота колонны и модулей, о тл и ч а ю щ и й с я тем, что, с целью расширения технологических возможностей путем увеличения рабочей зоны робота, 5 механизм ограничения угла поворота колонны выполнены в виде двух упоров, установленных на основании, промежуточного упора, расположенного между основани- ем и колонной с возможностью поворота вок ругоси колонны, и упора, установленного наколонне с возможностью взаимодействия с упорами, расположенными на основании через промежуточный упор, при этом механизм ограничения угла поворота третьего 15 модуля относительной продольной оси второго модуля выполнен виде ходового винта, связанного с выходным валом второго модуля, ползуна, установленного на направляющей, закрепленной на корпусе этого 20 модуля, и расположенного между виткамирезьбы ходового винта, и двух упоров, установленных на направляющей, с возможностью взаимодействия с ползуном, а механизм ограничения угла поворота вы ходного вала третьего модуля выполнен ввиде двух упоров, жестко связанных с корпусом этого модуля, промежуочного упора, расположенного на ползуне. установленном на направляющей, и упора, располо женного на выходном валу модуля свозможностью взаимодействия с упорами корпуса через промежуточный упор.1724451 5 Составительдактор И.Ванюшкина Техред М.Моргентал Ко М.Кучерявая роизводственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 аказ 1139 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ С 113035, Москва, Ж, Раушская наб 4/5
СмотретьЗаявка
4293552, 07.08.1987
СОВЕТСКО-БОЛГАРСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "КРАСНЫЙ ПРОЛЕТАРИЙ"-"БЕРОЕ"
КЛИМЕНКО ЮРИЙ ДМИТРИЕВИЧ, ЛЕБЯЖЬЕВ АНАТОЛИЙ ГЕОРГИЕВИЧ, ЛИ ЮРИЙ ГЕННАДИЕВИЧ, РАДОМИРОВ РАДОМИР ВАСИЛЬЕВ, ИВАНОВ ИВАН ЛЕЙЧЕВ
МПК / Метки
МПК: B25J 9/00
Метки: модульного, промышленный, робот, типа
Опубликовано: 07.04.1992
Код ссылки
<a href="https://patents.su/5-1724451-promyshlennyjj-robot-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Промышленный робот модульного типа</a>
Механизм поворота лопаток направлящего аппарата гидротурбины

Номер патента: 467194
Опубликовано: 15.04.1975
Автор: Гинзбург
МПК: F03B 3/18
Метки: аппарата, гидротурбины, лопаток, механизм, направлящего, поворота
...реннее динен Изобретение относится к области гидромашиностроения.Известны механизмы поворота лопаток направляющего аппарата гидротурбины, содержащие рычаги, соединенные с лопатками при помощи клиновых цилиндрических шпонок. Такие шпонки обеспечивают фиксацию рычага на лопатке с натягом, но вместе с тем металлоемки и трудоемки в изготовлении (особенно шлифование при обработке клиновой поверхности),Для уменьшения металлоемкости и трудоемкости изготовления механизма, а также уп. рощения сборки узла рычаг-лопатка в предлагаемом механизме шпонки выполнены в виде разрезанной вдоль оси втулки с коническим отверстием и размещенного внутри втулки конического штифта, боковая поверхность которого сопряжена с внутренней поверхностью втулки.На фиг....
Устройство для управления поворотом ведомых звеньев автопоезда

Номер патента: 652019
Опубликовано: 15.03.1979
МПК: B62D 13/04
Метки: автопоезда, ведомых, звеньев, поворотом
...ход пластины 8, возвратной пружиной 23 и стирающей головкой 24. Упор 21 установлен так, что расстояние 45 между головками 7 и 14 вдоль окружности барабана пропорционально базе звена. Упор 22 соответствует другому крайнему положению головки 7, когда расстояние от нее до головки 14 пропорционально длине пути между передними и задними колесами при дви женин звена "по окружности с минимальным радиусом.Устройство работает следующим образом. При входе звена в поворот датчики узла поворота 2 фиксируют угол поворота пе редних колес и посылают сигнал в блок записи 3 запоминающего узла. Блок записи преобразует сигнал в удобный для записи на магнитный носитель вид и посылает его на головку записи 7. Головка 7 записывает сигнал на магнитный...
Устройство для ограничения поворота балансира

Номер патента: 267357
Опубликовано: 01.01.1970
Авторы: Беленький, Высоцкий, Титович, Шаповалов
МПК: B60G 7/04
Метки: балансира, ограничения, поворота
...фиг. 1 изображен балансир в статиче ом положении; па фиг. 2 - то же, в поло жении предельного поворота при максималь.но нагруженной и ненагруженной рессоре.На п.чечах балансиров 1 подвески расположены приливы 2. Накладные ушки Л внутрен 5 них концов смежных рессор 4 крепятся к коренным листам рессор при помощи ограничительных упорных болтов 5. Расположение приливов 2 на плечах балансира, длина плеч балансира и серег б, а также размеры и распо ложение ограничительных упорных болтов 5взаимно согласованы так, что при заданном предельном повороте балансира 1 пооисходит замыкание устройства на площадке контакта ограничительных упорных болтов б и поили вов 2. Движение автомобиля по неровной дороге вызывает вертикальное перемещение осей...
Механизм с ограниченным поворотом ведомогч-элементаi

Номер патента: 328287
Опубликовано: 01.01.1972
Автор: Полат
МПК: F16H 29/02
Метки: ведомогч-элементаi, механизм, ограниченным, поворотом
...сегмента. Ведомый рычаг имеет входящи 1 в паз сектора выступ с фиксатором, взаимодействующимс углуолсписм сскто 1)с и корпуса.Это повышает надежность фцкцццц ведомого элемента; у:рощает ко 1 Струкцю мс 5 хацизма.На фцг. 1 цзооражец описываемый механизм, в:д спереди; ца фцг. 2 - то жс, видсбоку,Мсхзяизм содержит сорцус 1 с осью 2, ца10 которой свободно цасажны всдущцй элемент, представляОщий собой сектор Л с пазом а в виде ссгмсцта, ца большей дуге которого в радиальном направлении вы:юлцсцоуглубление б, и ведомый рычаг 4, цмсОщцй15 высту п 6 с размещенным в цсм промежуточным элементом, выполцсшым в виде фикс- тора 6.11 а корпусе жестко за,рсплсиа плит /,торцовая асть которо имеет20 скую поверхцость с углублсцисм в и упорами 8 по...
Механизм поворота лопаток направляющего аппарата гидромашины

Номер патента: 395608
Опубликовано: 01.01.1973
Авторы: Гольдшмидт, Забуга, Маргулис, Хесин
МПК: F03B 3/18
Метки: аппарата, гидромашины, лопаток, механизм, направляющего, поворота
...Рычаг 5 связали регулировочным винтом с шаровой опорой б с гидравлическим упором 7. Упор соединен с коллектором 8 для нагнетания и слива рабочей жидкости ц снабжен дроссельным устройством 9, управляемым от,клапана с элвкпромагнцтом 10.Для стопорения лопаток в определенном положении,клапан с элекгромагнитом 10 автоматически перекрывает слив из упоров 7 через коллектор 8. При этом усилие сервомотора 2 через регулирующее кольцо 3, серьгу 4 и рычаг 5, укрепленные жесвко на лопатках 1, передается на гидравлический упор 7, что приводит к стопорению направляющих лопата,к. Передача усилия от рыча на упор происходит только в зоне углов установки лопато го аппарата, который для на насосотурбины составляет 1 с зтцм перемещение винта с б по...
Предыдущий патент: Устройство для соединения деталей стягивающим элементом
Следующий патент: Способ управления торможением подвижного звена и устройство для его осуществления
Случайный патент: Многоручьевой кристаллизатор для непрерывного литья заготовок