Способ определения параметров инерционности датчиков физических величин и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1656325
Автор: Дубовский

Текст
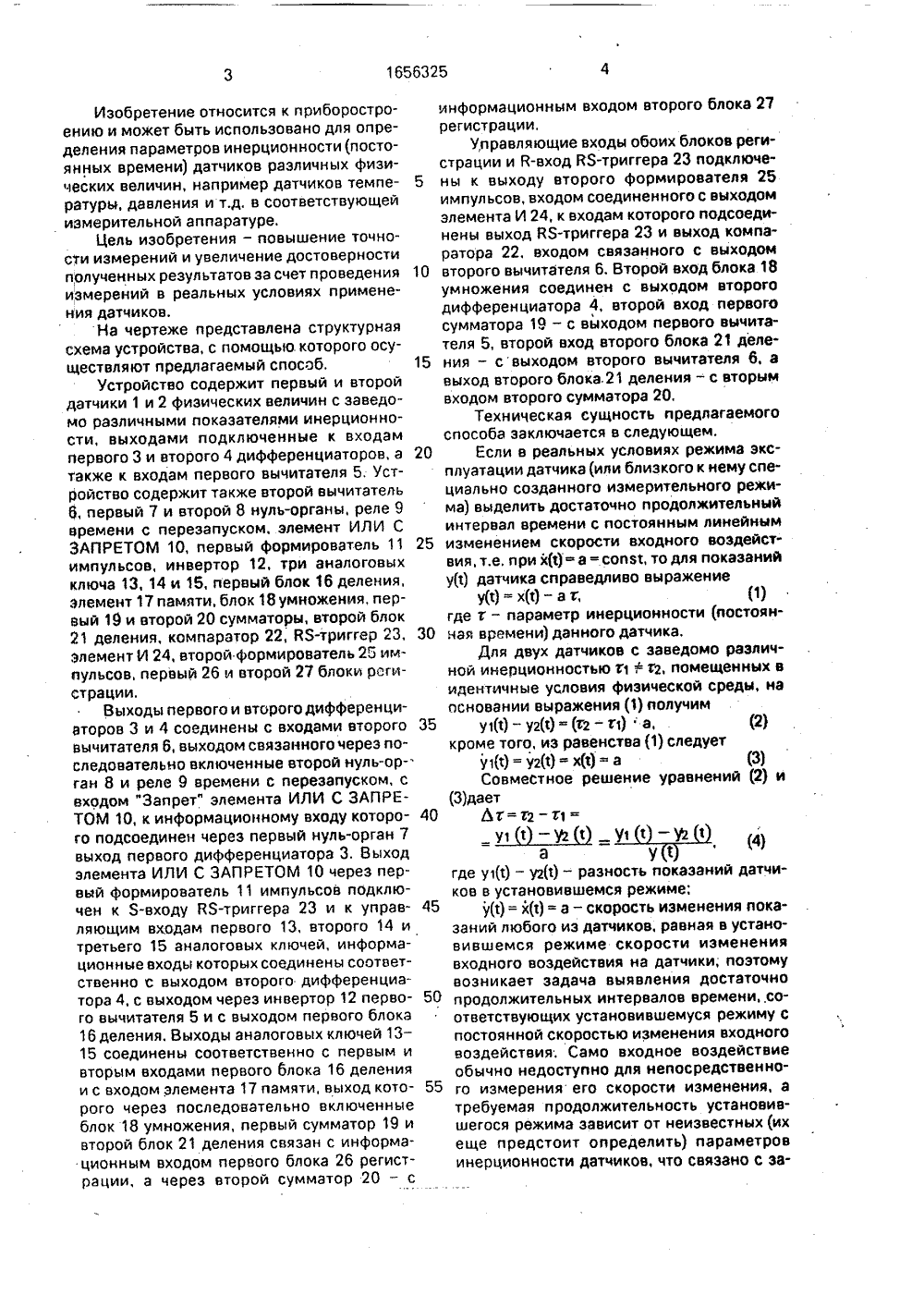
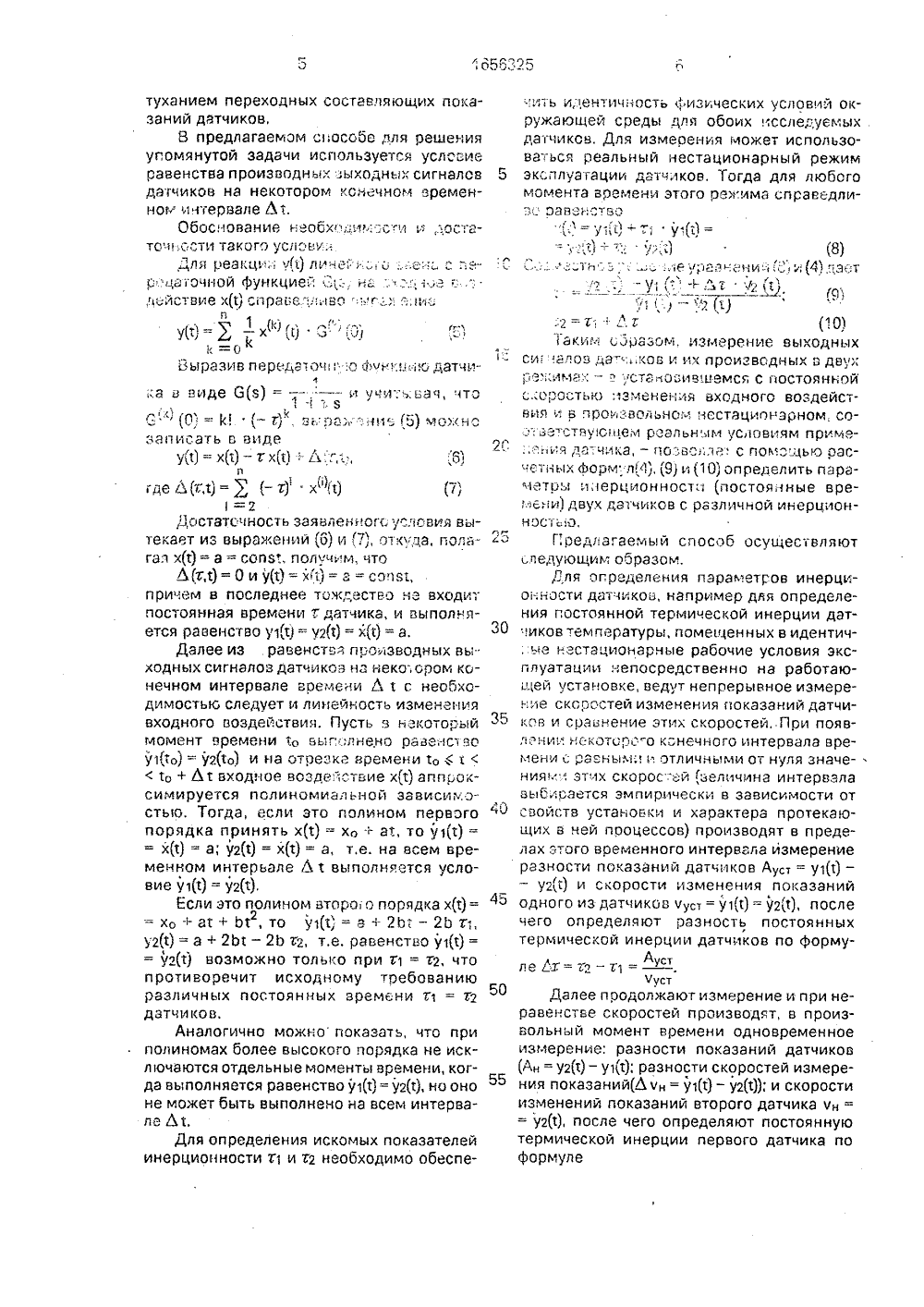
)325 А я)5 6 01 О 21 00 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИЯ 8 ТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ИНЕРЦИОННОСТИ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН И УСТРОЙСТВОДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к и риборостроению и может быть использовано для определения параметров инерционности(постоянных времени) датчиков различных физических величин, например температуры,давления и т.д. На первом временном интервале дифференциаторы 3 и 4 производятнепрерывное измерение скоростей изменения показаний датчиков 1 и 2, помещенныхв идентичные условия физической среды,ввычитателе 6 осуществляется их сравнение.Если на выбранном временном интервалесохраняется равенство этих скоростей (установившийся режим с постоянной скоростью изменения входного воздействия)через нуль-орган 8, реле 9 времени с перезапуском и элемент ИЛИ с запретом 10 запускается формирователь 11 импульсов, от которого срабатывают аналоговые ключи 13 - 15, ЯЯ-триггер 23, и начинает работать схема измерений, Первым блоком 16 деления определяется разность Ьг параметров инерционности обоих датчиков, которая запоминается в элементе 17 памяти. При этом умножитель 18, сумматор 19 и второй блок 21 деления формируют сигнал, пропорциональный постоянной времени г 1 первого датчика, а второй сумматор 20-сигнал, пропорциональный постоянной времени т 2 второго датчика. На втором временном интервале сравнения скоростей изменения показаний датчиков осуществляет компаратор 22. При их неравенстве, когда разность ско-ростей превышает установленный порог, через элемент И 24 и формирователь 25 дается разрешение на запись полученных результатов в блоки 26 и 27 регистрации, после чего срабатывает ВЗ-триггер 23 и схема измерений возвращается в исходное состояние. Точность измерений и достоверность полученных результатов повышаются за счет того, что измеренйе параметров имер- О ционности датчиков прбводят непосредст- (Я венно в процессе реальной работы датчиков 0 в заданных условиях. 2 с,вф-лы, 1 ил. Сд(4) Изобретение относится к приборостроению и может быть использовано для определения параметров инерционности (постоянных времени) датчиков различных физических величин, например датчиков температуры, давления и т,д, в соответствующей измерительной аппаратуре.Цель изобретения - повышение точности измерений и увеличение достоверности полученных результатов за счет проведения измерений в реальных условиях применения датчиков.На чертеже представлена структурная схема устройства, с помощью которого осуществляют предлагаемый способ.Устройство содержит первый и второй датчики 1 и 2 физических величин с заведомо различными показателями инерционности, выходами подключенные к входам первого 3 и второго 4 дифференциаторов, а также к входам первого вычитателя 5. Устройство содержит также второй вычитатель 6, первый 7 и второй 8 нуль-органы, реле 9 времени с перезапуском, элемент ИЛИ С ЗАПРЕТОМ 10, первый формирователь 11 импульсов, инвертор 12, три аналоговых ключа 13, 14 и 15, первый блок 16 деления, элемент 17 памяти, блок 18 умножения, первый 19 и второй 20 сумматоры, второй блок 21 деления, компаратор 22, ВЗ-триггер 23, элемент И 24, второй формирователь 25 импульсов, первый 26 и второй 27 блоки регистрации.Выходы первого и второгодифференциаторов 3 и 4 соединены с входами второго вычитателя 6, выходом связанного через последовательно включенные второй нуль-ор-. ган 8 и реле 9 времени с перезапуском, с входом "Запрет" элемента ИЛИ С ЗАПРЕТОМ 10, к информационному входу которого подсоединен через первый нуль-орган 7 выход первого дифференциатора 3. Выход элемента ИЛИ С ЗАПРЕТОМ 10 через первый формирователь 11 импульсов подключен к Я-входу ВЗ-триггера 23 и к управ ляющим входам первого 13, второго 14 и третьего 15 аналоговых ключей, информационные входы которых соединены соответственно с выходом второго дифференциатора 4, с выходом через инвертор 12 перво го вычитателя 5 и с выходом первого блока 16 деления. Выходы аналоговых ключей 13 - 15 соединены соответственно с первым и вторым входами первого блока 16 деления и с входом элемента 17 памяти, выход кото рого через последовательно включенные блок 18 умножения, первый сумматор 19 и второй блок 21 деления связан с информационным входом первого блока 26 регистрации, а через второй сумматор 20 - с информационным входом второго блока 27 регистрации.Управляющие входы обоих блоков регистрации и В-вход КЗ-триггера 23 подключены к выходу второго формирователя 25 импульсов, входом соединенного с выходом элемента И 24, к входам которого подсоединены выход ВЯ-триггера 23 и выход компаратора 22, входом связанного с выходом второго вычитателя 6, Второй вход блока 18 умножения соединен с выходом второго дифференциатора 4, второй вход первого сумматора 19 - с выходом первого вычитателя 5, второй вход второго блока 21 деления - свыходом второго вычитателя 6, а выход второго блока.21 деления - с вторым входом второго сумматора 20.Техническая сущность предлагаемого способа заключается в следующем.Если в реальных условиях режима эксплуатации датчика (или близкого к нему специально созданного измерительного режима) выделить достаточно продолжительный интервал времени с постоянным линейным изменением скорости входного воздействия, т.е, при х(1) - а = сопзт, то для показаний у(т) датчика справедливо выражениеу(т) = х(т)- а г, (1) где т - параметр инерционности (постоянная времени) данного датчика,Для двух датчиков с заведомо различной инерционностью х 1тг, помещенных в идентичные условия физической среды, на основании выражения (1) получимуФ) - уг(1) = (Гг - т 1) а, (2) кроме того, из равенства (1) следуетУ 1(т) = уг(т) = х(1) = а (3)Совместное решение уравнений (2) и (3)даетЬт=а-ц= где у 1(т) - уг(т) - разность показаний датчиков в установившемся режиме;у(т) = х(т) = а - скорость изменения показаний любого из датчиков, равная в установившемся режиме скорости изменения входного воздействия на датчики; поэтому возникает задача выявления достаточно продолжительных интервалов временисоответствующих установившемуся режиму с постоянной скоростью изменения входного воздействия. Само входное воздействие обычно недоступно для непосредственного измерения его скорости изменения, а требуемая продолжительность установившегося режима зависит от неизвестных (их еще предстоит определить) параметров инерционности датчиков, что связано с за туханием переходных составляющих показаний датчиков,Б предлагаемом сОсобе для решенияупомянутой задачи используется условиеравенства производных Выходных сигналовдатчиков на некотором конечном Временном интервале Лт.Сбосование необх, - :.и;:сси и,,ОстгточОсти такого условя(7)= гДОСтаточнОСть ЗаявленнОГО услОВИЯ ВЫтекает из выражений б) и,7), Отж:да, голаГая ХТ) = Э = СОПЗт, ПОЛУЧИМ., ЧТОЛтд) = О и у(д = хс) = а = соВ,причем в последнее тождество не входитпостоянная времени тдатчика, и Выполняется равенство уФ =- у 2(т) = х(т) = а.Далее из . равенства производных вь 1 ходных сигналоз датчиков на неко-, Ором конечном интервале Времени Л 1 с необходимостью следует и линейность измене.иявходного Воздействия, Пусть В некоторыйМОМЕНТ ВРЕМЕНИ То БЫГ".:ЛНЕНО РВВЕНСТВОу 1(то) = уело) и на Отрезка времени то (1(( 1 о + Л 1 ВХОДНОЕ ВОЗДЕСТВИЕ Х 1) аППРОКсимируется полиномиальной зависимостьо. Тогда, если зто полином первогопорядка принять х(1) == хо + ат, то уф) == х = а; уф) = х(1) = а, т,е. на всем временном интерьале Ьвыполняется условие уф) = уф).если это полином Второ О порядка х(1) ==. хо + а 1+ Ь, то уф, = а + 2 Ь: - 2 Ь ту 21) = а + 2 Ь - 2 Ь 72, т.е, равенство уф) =уЯЦ возможно только при т 1 = т 2, чтопротиворечит исходному тоебованиюразличных постоянных Времени т 1 = г 2датчи ко В.Аналогично можно показать, что приполиномах более высокого порядка не исключаются отдельные моменты времени, когда выполняется равенство уф) = у 2 но ононе может быть выполнено на всем интервале Ь 1.Для определения искомых показателейинерционности т 1 и т 2 необходимо обеспе. ить идентичность физических условий окружающей среды для обоих исследуемых да.чиков, Для измерения может использова;.ься реальный нестационарный режим 5 зксплуатации датчиков, Тогда для любогомомента Времени этого рея;има справедлиОав. = уи)уИ =т) -:- - т,) . Ф) л /2=Г, " ,т (", 0) 1 аким соразоь 1, измерение выходныхси:.алов даков и их производных В двух ре.:.иа:, -ста Овившемся с постоянной с.;Оростью:".з енения входного воздейстВия :, В произвольно 4 нестаципнзрном, со ;.:Ветствус ем реальньм ус,ювиям приме- О 1а ч ка - пОЗВО;ле С пм О цьЮ Расчетных форм л), 9) и ,10) Определить парагчетры ,:ерционност;: постоя;Ные вре;.Вни) двух датчиков с различной инерцион- НОСЬЮ,5 Предлагаемьй способ Осуществляют.ледующим образом.ДЛЯ ОГРаделениЯ параметов инеРцианности даЧиков, например для определения гостаянной термической инерции датЗО чиков температуры, помещенных в идентич: ые нестационарные рабочие условия зксплуатации непосредственно на работающей установке, ведут непрерывное измерение сксоостей изменения показаний датчиЗ 5 ков и сравнение зтих скоростей. При появлении нс.которо"о к-нечного интервала времени с равным ": Отличньми От нуля значения," зтих скорое "ей Вел 1 чина интервалаВыбирается змпирически в зависимости От л.10 свойств установки и характера протекающих В чей пооцессов) производят в пределах етого временного интервала измерение разности показаний датчиков Ауст = у 1(1) -- у 2 и скорости изменения показаний 45 ОДНОГО ИЗ датЧИКОВ Чуст = у 1) .= у 2), ПОСЛЕчего определяют разность постоянных термической инерции датчиков по формуле = о - г 1 =АустчустДалее поодолжают измерение и при неравенстве скоростей производят, в произвольный момент времени одновременное измерение; разности показаний датчиков(Аи = уЯТ) - у(т); разности скоростей измерения показанийА ч, = у 1(Т) - у 2(1; и скорости изменений показаний второго датчика чн = = уг(т), после чего определяют постоянную термической инерции первого датчика по формулеАн + Ь чнТ 1Ьчни второго датчика по формулеа 2 =т 1+ ЬкУстройство, с помощью которого осуществляют предлагаемый способ, работает следующим образом,На первом этапе с помощью первого и второго дифференциаторов 3 и 4 и второго вычитателя 6 осуществляют непрерывное измерение и сопоставление скоростей изменения показаний датчиков 1 и 2, При равенстве этих скоростей срабатывает второй нуль-орган 8 и запускает реле 9 времени с перезапуском, Если в пределах установленной выдержки времени этого реле равенство скоростей нарушается, то элементы 8 и 9 возвращаются в исходное состояние. Если равенство скоростей сохраняется в течение заданного интервала времени (которое выбирается эмпирически, с учетом свойств входного воздействия на датчики), установленного в реле 9 времени, последнее срабатывает и сигнал поступает на информационный вход элемента ИЛИ С ЗАПРЕТОМ 10, Если при этом скорости изменения показаний датчиков отличны ат нуля, на выходе первого нуль-органа 7 отсутствует сигнал запрета длл элемента 10, сигнал с выхода реле 9 времени проходит через элемент 10 и запускает первый формирователь "," импульсов, от которого срабатывает ВЯ-триггер и все три аналоговых ключа 13, 14 и 5. В первом блоке 16 деления при этом апре" деляется разность показателей инерционности датчиков в соответствии с формулой (4), которая запоминается в элементе 17 памяти,На втором этапе сопоставление скоростей изменения показаний датчиков выполняет кампаратар 22, Как только разность скоростей превысит установленный порог, выходной сигнал компаратара 22 через элемент И 24 запускает второй Формирователь 25 импульсов, выходной импульс которого возвращает в исходною состояние ВЯ-триггер 23 и дает разрешение на регистрацию сигналов с информационных входов первого и второго блоков 26 и 27 регистрации. На входе блока 26 при этом присутствует сигнал, пропорциональный показателю инерционности (постоянной времени) первого датчика 1, сформированный в соответствли с ФЬрмулой (9) элементами 18, 19 и 21. На входе второго блока 27 регистрации сигнал пропорционален постоянной времени второго датчика 2, этот сигнал формируется вторым сумматором 20 в соответствии с формулой (10), После завершения измере 20 25 30 35 40 50 бс ний устройство находится в исходном состоянии.Предлагаемый способ, осуществляемый с помощью описанного выше реализующего устройства, позволяет повысить точность определения параметров инерционности датчиков различных физических величин, а также увеличить достоверность полученных результатов за счет проведения измерений параметров инерционности датчиков непосредственно в процессе работы этих датчиков в реальных Физлческих условиях их применения,Формула изобретения 1. Способ определения параметров инерционности датчиков физических ва; ичин, при котором два датчика с заведамб различной инерционностью помещают в идентичные уславя Физической среды, измеряют разность их показаний и скорость изменения этих показаний л па расчетным формулам вычисляют параметры лнерционности аболх датчиков, а . л и ч а ю щ и й с я тем, чта, с целью повышения точности измерений и увеличения достоверности полученных результатов, датчики помещают в реальную физическую среду, в процессе измерения выделяют первь:й временной интервал с постоянной, отличной ат нуля и Одинаковой для обоих даиа скоро- СТЬЮ Чуст ИЗМЕНЕНИЯ ИХ ПОКаэаНИй, В ТЕЧЕНИЕ этога временного интервала измеряют скорас ь чуст и разность Ауст показаний первого и второго датчиков, вычлсллют разность Ьг параметров инерционности первого т 1 и второго:2 датчиков па формуле Ь к = т 2 - ц = = Аус/чуст, после чего, продолжая процесс измерений, выделяют второй временной интервал с неравными одна другой скоростями изменения показаний обоих датчиков, в произвольный момент времени второго временного интервала одновременно измеряют разность Ан показаний второго и первого датчиков, разность Ьчн скоростей изменения показаний первого и второго датчиков, а также скорость чизменения показаний второго датчика, после чего определяют параметры инерционности обоих датчиков по ФормуламАн+Ьт чнТ 1 =ЬчнТ 2=т 1+ Ьт,2, Устройство для определения параметров инерционности датчиков физических величин, содержащее клеммы подключения двух датчиков с заведома различной инерционностью, подключенные к входам первого и второго дифференциатарав, выходами связанных с входами первого вычиЗаказ 2044 Тираж 326 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул,Гагарина, 101 тателя,отл ича ю щеес ятем,что, с целью повышения точности измерений и увеличения достоверности полученных результатов, в него введены второй вычитатель, два нуль-органа, реле времени с перезапуском, элемент ИЛИ С ЗАПРЕТОМ; два формирователя импульсов, инвертор, три аналоговых, ключа, элемент памяти, два блока деления, компаратор, блок умножения, два сумматора, ВЗ-триггер, элемент И и два блока регистрации, выход первого дифференциатора связан через первый нуль-орган с входом "Запрет" элемента ИЛИ С ЗАПРЕТОМ к информационному входу которого подсоединен через последовательно включенные второй нуль-орган и реле времени с перезапуском выход второго вычитателя, к первому и второму входам которого подключены соответственно выходы первого и второго дифференциаторов, выход элемента ИЛИ С ЗАПРЕТОМ через первый формирователь импульсов соединен с 8-входом ВЗ-триггера и с управляющими входами первого, второго и третьего аналоговых ключей, информационные входы которых . соединены соответственно с выходом второго дифференциатора, с выходом через инвертор первого вычитателя и с выходом первого блока деления, а выходы этих ключей соединены соответственно с первым и вто рым входами первого блока деления и свходом элемента памяти, выход которого через последовательно включенные блок умножения, первый сумматор и второй блок деления подлючен к информационному вхо ду первого блока регистрации, а через второй сумматор - к информационному входу второго блока регистрации, при этом управляющие входы обоих блоков регистрации и Й-вход ЙЗ-триггера подключены к выходу 15 второго формирователя импульсов, вход которого соединен с выходом элемента И, к входам которого подсоединены выход ЙЗ.риггера и выход компаратора, входом связанного с выходом второго вычитателя, к 20 вторым входам блока умножения, первогосумматора, второго блока деления и второго сумматора подключены выходы соответственно второго дифференциатора, первого вычитателя, второго вычитателя и второго 25 блока деления.
СмотретьЗаявка
4670974, 29.12.1988
ПРЕДПРИЯТИЕ ПЯ Р-6788
ДУБОВСКИЙ ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G01D 21/00
Метки: величин, датчиков, инерционности, параметров, физических
Опубликовано: 15.06.1991
Код ссылки
<a href="https://patents.su/5-1656325-sposob-opredeleniya-parametrov-inercionnosti-datchikov-fizicheskikh-velichin-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения параметров инерционности датчиков физических величин и устройство для его осуществления</a>
Приемник к устройству для передачи на расстояние показаний об изменениях уровня жидкости

Номер патента: 72994
Опубликовано: 01.01.1948
Автор: Бутурлинский
МПК: G01F 23/18
Метки: жидкости, изменениях, передачи, показаний, приемник, расстояние, уровня, устройству
...автоматическая электромагнитная кнопка 15, совмещенная с корректирующей кнопкой 10, При помощи корректирующей кнопки, которая фрикционно соединяет колесо кнопки со шкалой прбора, О 5 кно, поворачивая кнопку, перемещать шкалу прибора вправо или влево.Параллельно обмоткам звонка и ко.денсаторам С 1 и С 2 присоединена для ВодянОГО сиГнала неоновая лампа Н;. ЗВОнОк питается От местной сухой батареи 15.При разборе воды из бака подв 15 кно контакт К, установленный на зубчатой рейке 3 датчика, опускается, размыкая звонковую цепь. При дальнейшем расходе воды из оака зубчатая рейка вместе с сильфоном опускается вниз и периодически замыкает контакты в и г группы 5. При этом направление тока, идущего из батареи б, изменяется на обратное. Под...
Способ производства готовых к употребле1ю первых и вторых обеденных блюд

Номер патента: 318386
Опубликовано: 01.01.1971
Авторы: Всесоюзный, Ершова, Ефимов, Котович, Кузнецова, Мииеев, Овощесушильиой, Пупынина
МПК: A23B 7/005, A23L 1/40
Метки: блюд, вторых, готовых, обеденных, первых, производства, употребле1ю
...компонентами, подвергая всю массу термической обработке при температуре 85 - 90 С под вакуумом. В подготовленную смесь при тщательном перемешивании вводят готовый бе лый соус, который соединяет имеющиеся тонкоизмельченные частицы с жидкой фазой.Однородную смесь борща быстро расфасовывают на тубонаполнительной машине в алюминиевые тубы.10 Наполненные и герметически закупоренныетубы направляют на стерилизацию в авто.клавы,Полученная готовая консервная продукция15 представляет собой однородную, нерасслаивающуюся массу, пригодную одновременно дляее разжевывания, что особенно важно при питании в условиях невесомости.С целью получения однородной, нерасслаи 20 вающейся смеси с мелкоизмельченными частицами составных компонентов по...
Устройство для тепловой защиты электродвигателя

Номер патента: 1372448
Опубликовано: 07.02.1988
Метки: защиты, тепловой, электродвигателя
...эоны нечувствительности, а ключ 22 переключает на вход регулятора положения цепь управления,.Так как управляющее воздействие на входе регулятора положения является стационарным случайным процессом, близким к нормальному, то необходимо это учитывать при формировании зоны нечувствительности регуля 1 О 30 где 1 - номинальный ток двигателя;1, - эквивалентный ток двигателя;1 - перегрузочная способность двига 35 теля по току; У, - начальная зона нечувствительности регулятора положения Н - скорректированная зона неф гчувствительности регулятора положеЧЗ,ния К = К - третий центь 4 зральный момент управляющего воздействия; Й - среднеквадратическое отклонение управляющего воздействия; К ь = 1/6 - постоянный коэффициент.45 Зависимость...
Устройство для контроля канала связи

Номер патента: 1598188
Опубликовано: 07.10.1990
Авторы: Давыденко, Коничев, Разгуляев, Черненко
МПК: H04B 17/00
...задержанных в и элементах 9 задержки на время выполнения вычислений в сумматоре 8При выполнении условия-1 В - " (г) 1 М Ии;-И;., И;+соответствующего области регистрации недоуплотненных следов, на выходе 1-го блока 10 сравнения Формируется логическая единица, Если условие (2) не выполняется, что соответствует области регистрации переуплотненных следов, на выходе соответствующего блока 1 О сравнения Формируется логический ноль. Выходные сигналы и блоков 10 сравнения управляют работой коммутаторов 13, переключая выходы и элементов 9 задержки к входам первого дополнительного сумматора 14 или второго дополнительного сумматора 15 в зависимости от поступающих сигналов на управляющие входы и коммутаторов 13. На входы каждого,исумматора 11 по...
Тренажер для обучения операторов бортовых приборов

Номер патента: 505018
Опубликовано: 28.02.1976
Авторы: Башкиров, Маркин, Минаев, Мольков, Семенов, Сенько, Чемоданов
МПК: G09B 9/08
Метки: бортовых, обучения, операторов, приборов, тренажер
...имитаторе пульта управления прибора и системы управления 1. Включает тумблеры управления питанием прибора, управления имитацией работы вспомогательных устройств (арретиров, шзорок и т, д,), управления питанием системы управления. При этом информация о работе вспомогательных устройств и положении тумблеров выдается на световые табло на лицевой панели имитатора пульта управления прибора и системы управления 1 с блока имитации ответных сигналов 4 по сигналам с имитатора пульта управления прибора и системы управления 1,Затем оператор переводит переключатель режимов работы на лицевой панели в положение, соответствующее полуавтоматическому режиму работы. В этом случае блок изменения структуры 5 коммутирует в машине 6 программу,...
Предыдущий патент: Устройство для измерения пробега
Следующий патент: Способ контроля работоспособности двухроторного турбинного расходомера
Случайный патент: Устройство для отделения полосового материала из стопы и выдачи его в подающий механизл