Манипулирующее устройство
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(56) Авторское свидетельство СССР1057238, кл, В 25 Л 11/00, 1982, (54) МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО (57) Изобретение относится к области машиностроения, в частности к конструкциям манипуляторов промышленных роботов, Целью изобретения является расширение технологических возможностей и повышение точности переналадки эа счет переналадки схвата во всем его диапазоне захвата иэделий как за наружную, так и эа внутреннюю поверх 2 зуб йс ще6,2 я, св ривод ри пе типор колесо 8 сэлементомпри этом ев кол ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ности. Это достигается тем, чточатые колеса привода схвата устро тва образуют планетарную передачу,на сателлитах которой закрепленыгубки 17 схвата, а сателлиты сцеплены с зубчатым колесом 14, закрепленным в корпусе 1, на котором установлено второе центральное колесо 8с возможностью его осевого перемеязанное с зубчатым колесом имым в движение двигателем реналадке схвата на раэлич азмер детали, центральное тыкуется с исполнительным18 механизма переналадки, происходит расцепление зус 8 и 6. 5 ил,Изобретение относится к машиностроению, в частно=ти к конструкциям манипуляторов промышленных роботов,Цель изобретения - расширение технологических возможностей за счет регулировки схвата в широком диапазоне диаметров изделий и повышениеточности переналадки,На фиг. 1 изображено предлагаемое устройство, разрез; на фиг. 2разрезе А-А,на фиг, 1; на фиг, 3вид Б на фиг. 1; на фиг. 4 - то же,после переналадки схвата на другойдиаметральный типоразмер изделия сзахватом его за внутреннюю поверхность; на фиг. 5 - схват устройствапри зажиме детали за наружную поверхность, разрез.Манипулирующее устройство содержит механическую руку с корпусомна которой установлен схват с привоФдом, включающим двигатель 2 линейнога перемещения с рейкой 3, поршнем4 и пружиной 5, зубчатое колесо 6,подшипники 7,Кроме того, привод содержит планетарный механизм с центральным колесом 8, имеющим дополнительный зубчатый венец, возвратной пружиной 9,сателлитами 10, кольцами 11, подшипниками 12 и водилам 13. Другое центральное колесо 14 этого механизма припомощи колец 15 и 16 закреплено накорпусе 1. Губки 17 схвата эксцентрично закреплены на сателлитах 10.Для обеспечения работы с различными, деталями манипулирующее устройствоимеет механизм переналадки губоксхвата на определенный типоразмердеталей, включающий установленный наосновании с возможностью поворота исполнительный элемент 18, приводимыйчерез редуктор 19 двигателем 20. На нижнем торце центрального колеса 8 выполнена прорезь 21, в которой может размещаться выступ исполнительного элемента 18 при осуществлении переналадки схвата на другой типоразмер детали,Манипулирующее устройство работает следующим образом.Переналадка схвата манипулирующего устройства на другой типоразмер детали с захватом его за внутреннюю поверхность может осуществляться в следующей последовательности,5 10 15 20 25 30 35 40 45 50 55 Системой управления падается управляющий сигнал на подачу давления в полость корпуса двигателя 2 (силовога цилиндра), что приводит к перемещению поршня 4, рейки 3 и сжатию пружины 5, обеспечивающей необходимое усилие при захвате детали. Рейка 3, сцепленная с зубчатым колесом 6, поворачивает его на угол, определяемый ходом рейки 3Поворот зубчатога колеса 6 через зубья передается на центральное колесо 8, которое поворачивает сателлиты 10, При этом последние, опираясь на зубчатый венец колеса 14, жестко закрепленного на корпусе 1, участвуют в двух взаимосвязанных перемещениях: повороте вместе с водилам 13, в котором они установлены на подшипниках 12, вокруг оси центрального колеса и повороте вокруг собственных осей, который приводит к повороту вокруг этих же осей губок 17, жестко скрепленных с сателлитами, что обеспечивает разжатие губок схвата и освобождение изделия.По сигналу системы управления манипулирующего устройства его рука осуществляет вертикальное перемещение схвата вверх, обеспечивая выход губок 17 из зоны расположения детали. По сигналу системы управления манипулятора сжатый воздух выпускаетсяиэ полости корпуса двигателя 2 силовога цилиндра, при этом под действием усилия сжатой пружины 5 рейка 3 ипоршень 4 возвращаются в исходное положение, осуществляя поворот губок17 в обратном направлении,Далее по сигналу системы управления рука со схватом перемещается взону расположения механизма переналадки и устанавливается в положении,когда ось центрального колеса 8 схвата совпадает с осью исполнительногоэлемента 18 (фиг. 1), а последнийимеет такое угловое положение относительно своей оси, что его выступ параллелен прорези на торце колеса 8,Это угловое положение, исполнительного элемента обеспечивается соответствующей предварительной настройкойпосредством подачи управляющих сигналов на шаговый двигатель 20 от системы управления автоматизированнойтехнологической ячейкой, Затем по сигналу системы управления рука соточности переналадк, привод пере.ещения.,губок схвата выполнен в видустановленного на корпусе руки зубчатого колеса, кинематичеки сязанного с двигателем охвата, и планетарного механизма, одно центральное Околесо которого имеет зубчатый венецвнутреннего зацепления и закрепленона корпусе руки, а другое выполненос дополнительным зубчатым венцом иустановлено в корпусе руки с возможностью вращения и осевого перемещения, причем губки схвата эксцентрично закреплены на сателлитах планетарного механизма, а центральное колесо с дополнительным зубчатым венцом подпружинено в осевом направлении относительно корпуса руки и расположено с возможностью зацеплениясвоим дополнительным зубчатым венцом с зубчатым колесом привода перемещения, при этом на торце центрального колеса с дополнительным зубчатым венцом выполнена прорезь, предназначенная для размещения в ней припереналадке соответствующего выступа, выполненного на исполните.ьном 40элементе механизма переналадки,са,схватом осуществляет вертикальн)перемещение вниз, обеспечивая размещение выступа исполнительного элемента 18 в прорези колеса 8 и выходего зубьев из зацепления с зубьямизубчатого колеса 6, При этом сжимается возвратная пружина 9.Далее происходит поворот вала шагового двигателя 20, который черезредуктор 19 передается на исполнительный элемент 18, который своимвыступом, вставленным в прорезь колеса 8, осуществляет его поворот, авместе с ним и сателлита 10. Колесом8 зубчатое колесо 6 не поворачивается, так как их зубья разведены. Уголповорота вала шагового двигателя 20такой, что в конце поворота губки 17устанавливаются с некоторым небольшим зазором диаметра описанной окружности поверхности контакта губок17 относительно поверхности захватадетали, а зубья центрального колеса8 и зубчатого колеса 6 устанавливаются один против другого так, чтопри обратном осевом перемещении центрального колеса они входят в нормальное сцепление. Для улучшения сцепления торцы зубьев, входящих в контакт,могут быть закруглены,Затем по сигналу системы управления рука осуществляет вертикальноеперемещение схвата вверх. При этомцентральное колесо 8 выходит из контакта с исполнительным элементом 18и возвратная пружина 9 осуществляетосевое перемещение центрального колеса вниз до упора, обеспечивая сцепление с зубьями дополнительного коле)р м ), л а;) ) ,)с ИанУлирук)ще ут) 1 н) - жаще установлен)ы н н нянин м - ханческую руку охн,т)м и мх). - ниэм переналадки губ)о) хвата на определенный типоразмер детали, включающий в себя двигате.ьиполните:ьным элементом длятьковки с) схватом, о т л и ч а ю щ е с с я тем, что, с целью расширения технологических возможностей и повып)ен)я1342722 Составитель Е. ЕрмолаевТехред М.Ходанич Корректор Л. Пилипенко Редактор И, Горная Тираж 951 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д, 4/5
СмотретьЗаявка
3838685, 09.01.1985
ПРЕДПРИЯТИЕ ПЯ В-8451
ЛИ ВАЛЕРИЙ АЛЕКСЕЕВИЧ, МОЛЧАНОВ СТАНИСЛАВ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: манипулирующее
Опубликовано: 07.10.1987
Код ссылки
<a href="https://patents.su/5-1342722-manipuliruyushhee-ustrojjstvo.html" target="_blank" rel="follow" title="База патентов СССР">Манипулирующее устройство</a>
Механизм управления задним колесом плуга
Номер патента: 1007570
Опубликовано: 30.03.1983
Авторы: Кангро, Нугис, Тамметс, Якобсон
МПК: A01B 63/16
Метки: задним, колесом, механизм, плуга
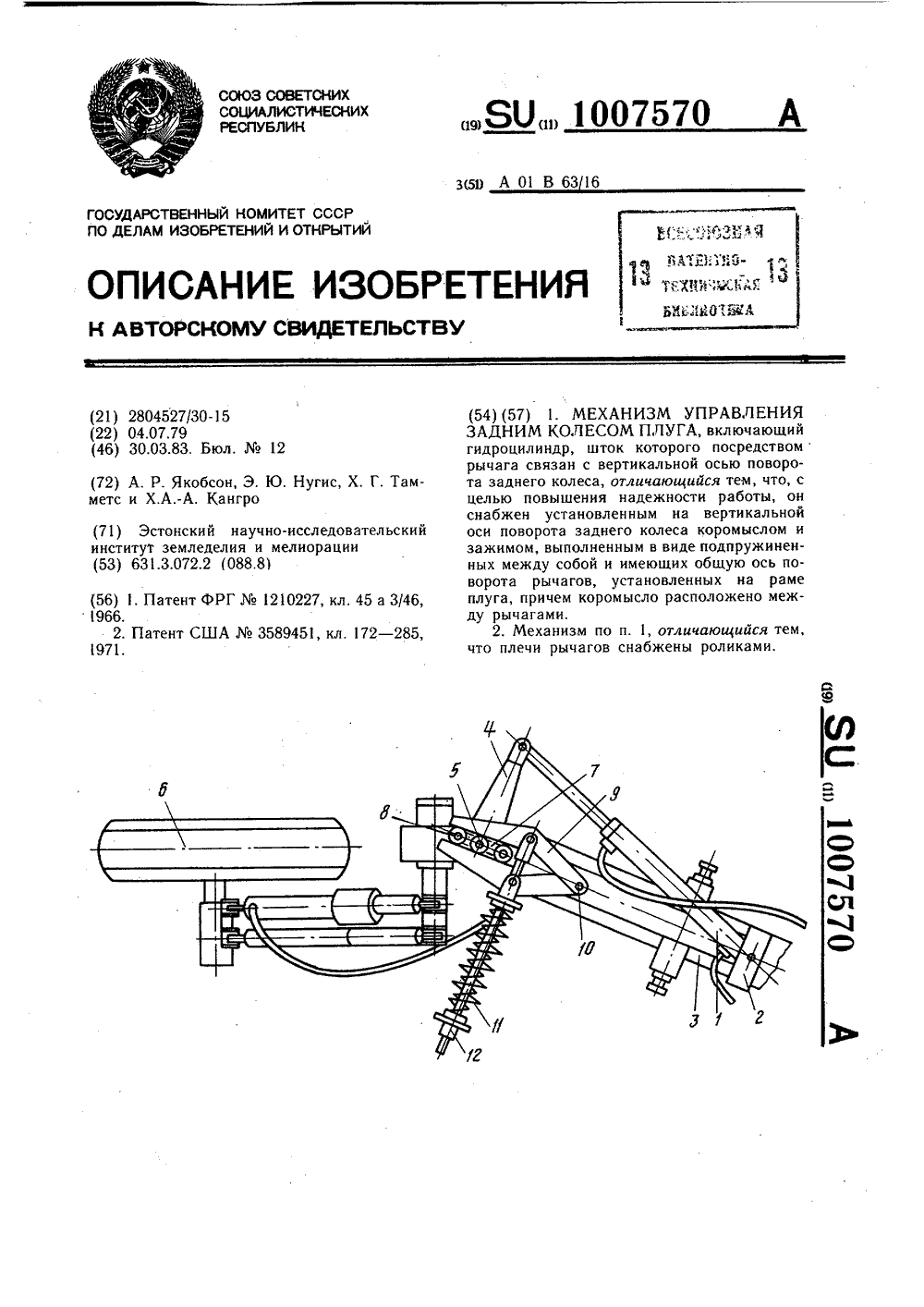
...поворота рычагов, установленных на раме плуга, причем коромысло расположено между рычагами.Плечи рычагов снабжены роликами.На чертеже изображен механизм управления задним колесом плуга, общий вид. Механизм управления задним колесом плуга включает гидроцилиндр 1, корпус которого посредством кронштейна 2 связан с рамой 3 плуга, а шток соединен с одним концом рычага 4, другой конец которого жестко прикреплен к оси 5 поворота заднего колеса 6 плуга. На верхнем конце вертикальной оси 5 поворота жестко прикреплено коромысло 7, на обоих концах которого имеются поворотные ролики 8. Коромысло 7 установлено в горизонтальной плоскости и по всей длине охвачено зажимом 9, установленным также в горизонтальной плоскости. Оба рычага зажима 9 при...
Механизм управления задним колесом плуга

Номер патента: 210511
Опубликовано: 01.01.1968
Авторы: Ашаев, Гогунский, Калюжный, Ким, Кудерский, Медведев, Параев, Циммерман, Ярош
МПК: A01B 3/46
Метки: задним, колесом, механизм, плуга
...при работе на пересеченной местности. 10В описываемом механизме управления заднего колеса плуга такая стабилизация обеспечивается,Достигается это тем, что шарнирно-рычажная система выполнена в виде штанги, соеди ненной вертикальным шарниром с кронштейном оси навески и входящей в телескопическую муфту, Последняя посредством горизонтального шарнира связана с поворотным кулаком, установленным в вертикальном под шипнике и другим концом соединенным с регулируемой тягой.На чертеке схематически изображен описываемый механизм управления заднего колеса плуга в двух проекциях. 25Механизм содержит кронштейн 1, жестко связанный с вертикальной осью навески плуга 2. С кронштейном вертикальным шарниром 3 соединена штанга 4, другим концом входящая...
Механизм управления задним колесом полунавесного плуга

Номер патента: 459174
Опубликовано: 05.02.1975
Авторы: Ашаев, Захаров, Ким, Кирюхин, Циммерман, Чирков, Ярош
МПК: A01B 3/46
Метки: задним, колесом, механизм, плуга, полунавесного
...схематически изображен предлагаемый механизм, Он содержит вертикаль ную ось 1, закрепленную на навесной системе трактора, к которой шарнирно присоединена рама плуга и жестко насажен шкив 2. На оси 3 заднего управляемого колеса 4 плуга установлен шкив 5. Шкивы 2 и 5 связаны пере крестной гибкой тягой 6, например в виде троса. Элементы гибкой тяги закреплены на шкивах с целью исключения проскальзывания. Гибкая тяга имеет регулировочные устройства в виде планок 7 с регулировочными отверстия с навеской ством гибугол в обним и коом радиусе ора. В реротной по- ость агреедмет изобретени судерственный комитет (32) П, Ярош и Г, Н. Чирково Красного Знамени научнокохозяйственного машиностроГорячкина ми (грубая регулировка)(тонкая...
Механизм управления задним колесом плуга

Номер патента: 676196
Опубликовано: 30.07.1979
Авторы: Боль, Бондарев, Вилисов, Горбов, Гурвич, Ким, Овчинников
МПК: A01B 3/46
Метки: задним, колесом, механизм, плуга
...плуга и связанцог с траверсой 2 посредством(р:Вошцпа , трубопроводов 4 ця, цсзо, - .)Итсльного гцдропцлцндра б, связанного со стс".ой 7 заднего колеся 8, и)дроаккумулято 1 ОВ 9 поршневого типа, под:(лоченных к трубопроводам 4 и б,Работает механизм слсдующим обрт.3 О;1.Прц повсротс тря.-" рсы 2 через криво:;:11:; црц: одцтся в двжкение шток с порш:1,.:, Задатот."О ГПД 1 Гпцлцнд 11 Я 1. ЧЯСтьжидкости под действием поршня переметт:СТСЯ (т .т,(ътптОГ "т "хт 4 ц б В ;Вцс 1.10.ТЦ Ото Ц Р Я Г т)е)пт ПОВОРОТО ТРНОР(,2, в Гцдроякку(улятор 9, сжимая сго пртжину, я часть ее перемещается г гцдроццлцдр, ц Воздействует НЯ его поршень, бла.ОДЯРЯ ЧЕМ. ЗЯДЦЕС КОЛЕСО 8 ГОВОРЯЦВЯЕТ -ся. Г.р"-.(: м " О, ъоОрОтя меньше ула погоотя т 1 тявс.сы 2, П 1 ц...
Механизм поворота опорного колеса оборотного плуга

Номер патента: 753374
Опубликовано: 07.08.1980
Авторы: Бахтадзе, Карцивадзе, Цхакая
МПК: A01B 3/46
Метки: колеса, механизм, оборотного, опорного, плуга, поворота
...поводка, шарнирно закрепленного на раме и криволинейной направляющей с упорами, а для регулирования глубины обработки по О водок выполнен телескопическим 11 .Известен также механизм поворота опорного колеса оборотного плуга, включающий поводок с закрепленным на нем колесом, поворотный груз ус тановленный на раме плуга посредством кронштейна и упоры для удержания ,колеса в рабочем положенииРЗ.Общими недостатками известных механизмов является сложность конструкО ции и недостаточная надежность иэ-за ;наличия в механизмах телескопических соединений звеньев.Целью изобретения является упрощение конструкции и повышение надеж ности.Цель достигается тем, что поводок выполнен в виде двуплечего рычага, одно из плеч которого взаимодействует с...
Предыдущий патент: Промышленный робот
Следующий патент: Промышленный робот
Случайный патент: Следящая система синхронизации скорости электродвигателей