Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1234810
Авторы: Михальченок, Новиков, Сидорович, Суслов

Текст
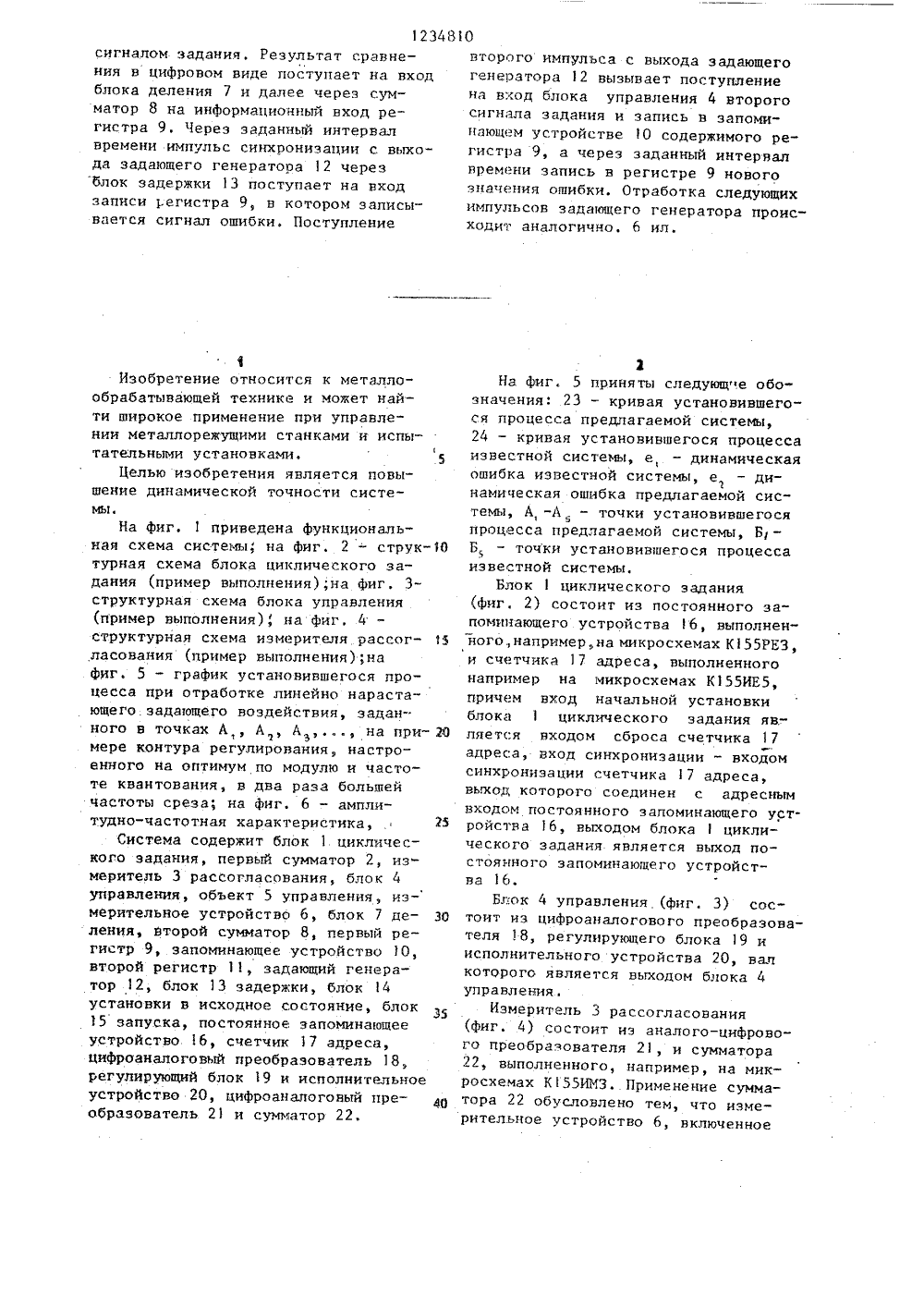
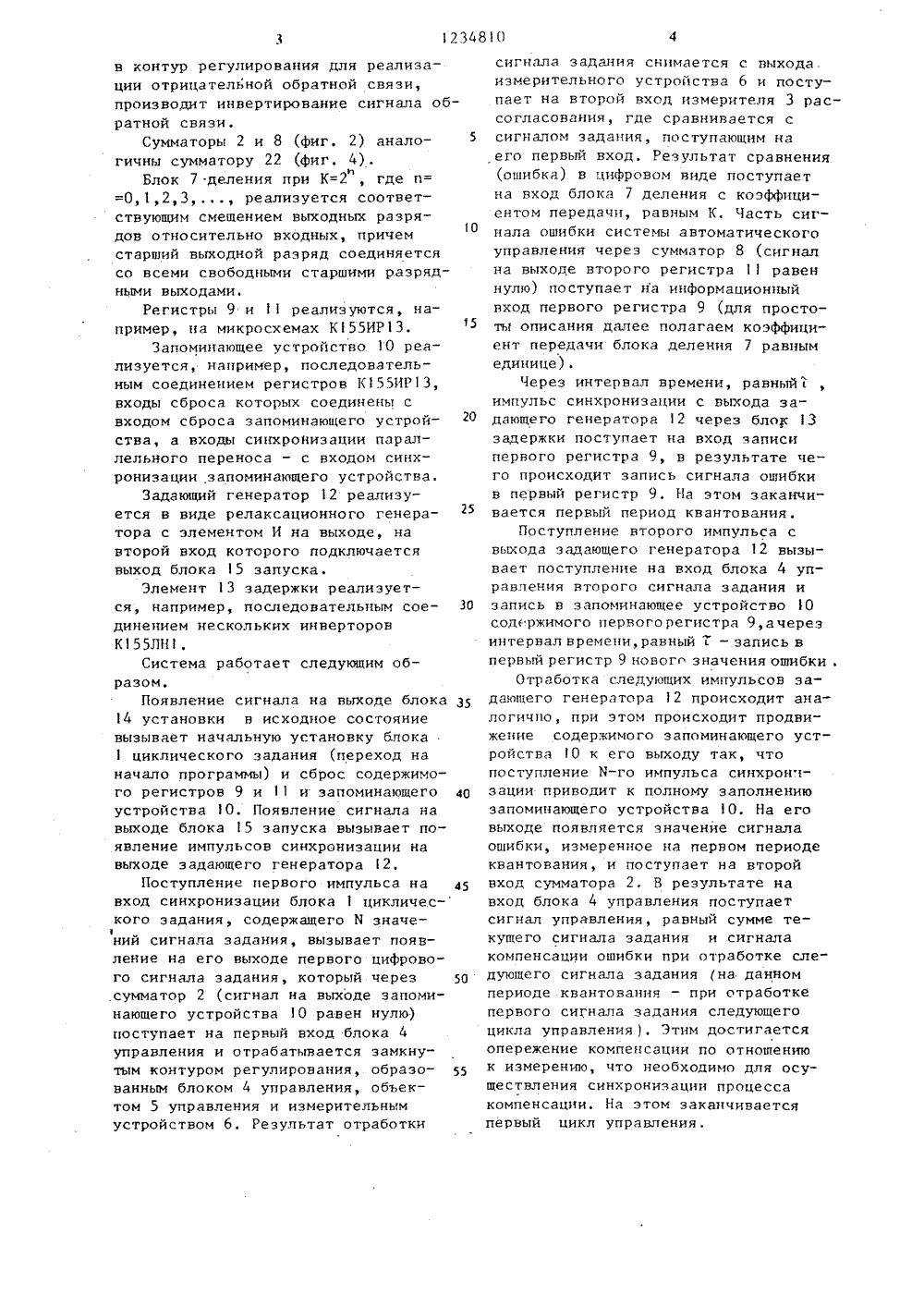
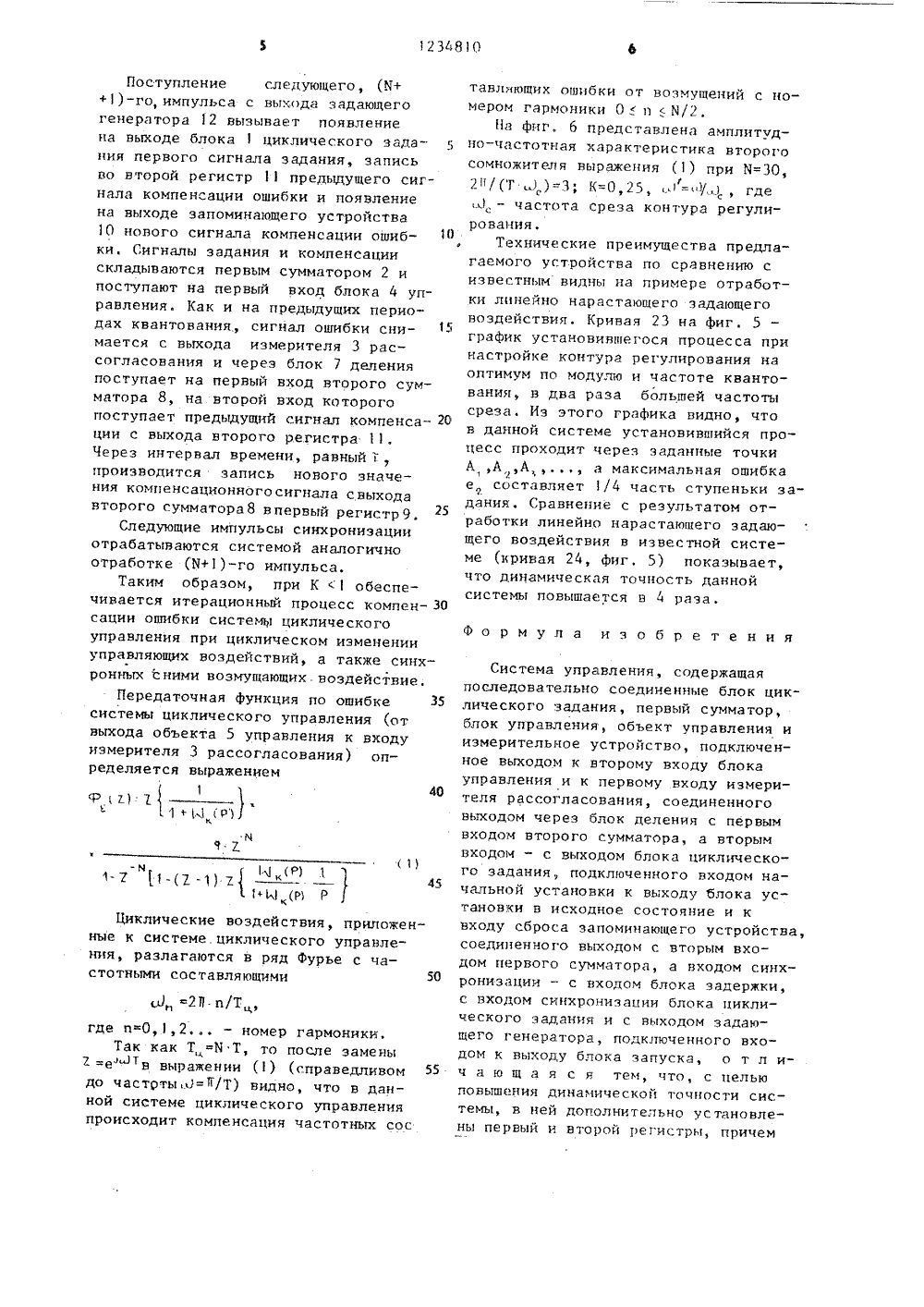
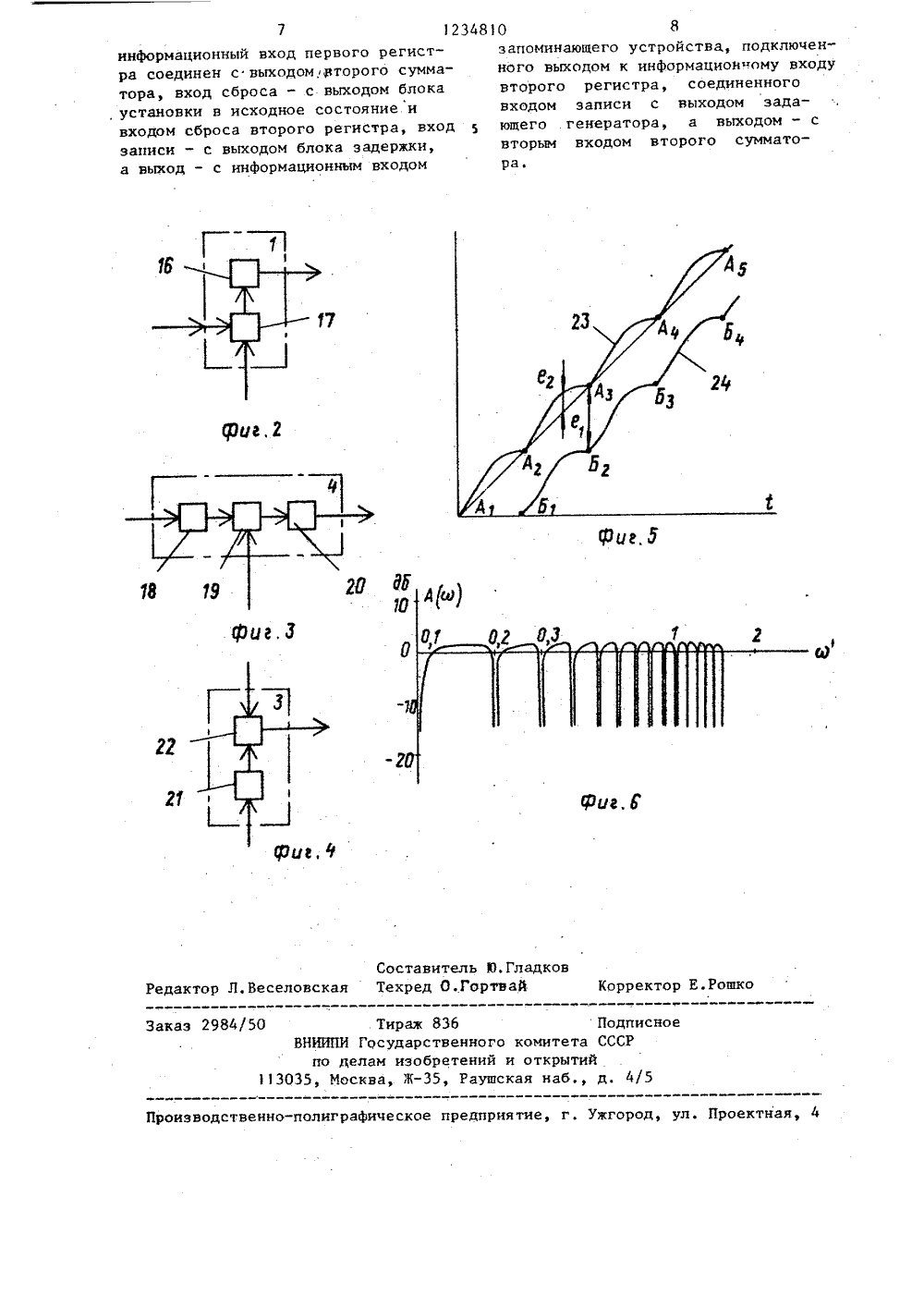
(54) СИСТЕМА У (57) Изобретен ти металлообра для работы в уменаощихся упр рх воздействий е относится к облзсоткн, предназначено ловиях циклически извляющих и возмущаю- и может быть испольСУДАРСТВЕКНЫЙ КОМИТЕТ ССС ПО ДЕЛ ".М ИЗОБРЕТЕНИЙ И ОТНРЬ 1 Т(56) Соломенцев 1 О.М. и дное управление технологицессами. - М.: Машинострс. 113-123.Патент Великобриткл. С 05 В 13/02, оп зовано при построении прециэчонныхсистем программного управления металлорежущими станками и испытательными установками. Повьппение динамической точности системы при отработке циклических управляющих воздействий достигается за счет настройкиконтура регулирования на оптимум помодулю и частоте квантования. Поступление первого импульса на входсинхронизации блока циклическогозадания 1 вызывает появление на еговыходе первого цифрового сигнала задания, который через сумматор 2 поступает на первый вход блока управления 4 и отрабатывается замкнутымконтуром регулирования, образованнымблоком управления 4, объектом управления 5 и измерительным устройством6, Выходной сигнал последнего поступает на второй вход измерителя рассогласования 3, где сравнивается с1234810 сигналом задания. Результат сравнения в цифровом виде поступает на входблока деления 7 и далее через сумматор 8 на информационный вход регистра 9. Через заданный интервалвремени импульс синхронизации с выхода задающего генератора 12 черезблок задержки 13 поступает на входзаписи 1.егистра 9, в котором записывается сигнал ошибки, Поступление Изобретение относится к металлообрабатывающей технике и может найти широкое применение при управлении металлорежущими станками и испытательными установками, 5Целью изобретения является повышение динамической точности системы вНа фиг. 1 приведена функциональная схема системы; на фиг. 2 - структурная схема блока циклического задания (пример выполнения);на фиг. 3- структурная схема блока управления (пример выполнения), на фиг. 4 структурная схема измерителя рассог ласования (пример выполнения);на фиг, 5 - график установившегося процесса при отработке линейно нарастающего.задающего воздействия, заданного в точках А А Ана при Э мере контура регулирования, настроенного на оптимум по модулю и частоте квантования, в два раза большей частоты среза; на фиг. 6 - амплитудно-частотная характеристика 25Система содержит блок 1 циклического задания, первый сумматор 2, измеритель 3 рассогласования, блок управления, объект 5 управления, из- мерительное устройство 6, блок 7 де- Зо ления, второй сумматор 8, первый регистр 9, запоминающее устройство 10, второй регистр 11, задающий генератор 12, блок 13 задержки, блок 14 установки в исходное состояние, блок 15 запуска, постоянное запоминающее устройство 16, счетчик 17 адреса, цифроаналоговый преобразователь 18 регулирующий блок 19 и исполнительное устройство 20, цифроаналоговый преобразователь 21 и сумматор 22. второго импульса с выхода задающегогенератора 12 вызывает поступлениена вход блока управления 4 второгосигнала задания и запись в запоминающем устройстве О содержимого регистра 9, а через заданный интервалвремени запись в регистре 9 новогозначения ошибки. Отработка следующихимпульсов задающего генератора происходит аналогично. 6 ил. аНа фиг. 5 приняты следующ 1 е обозначения: 23 - кривая установившегося процесса предлагаемой системы, 24 - кривая установившегося процесса известной систем, е, - динамическая ошибка известной системы, е - динамическая ошибка предлагаемой системы, А, -А, - точки установившегося процесса предлагаемой системы, Б - Б. - точки установившегося процесса известной системы.Блок 1 циклического задания (фиг. 2) состоит из постоянного запоминающего устройства 6, выполненного, например, на микросхемах К 155 РЕЗ, и счетчика 17 адреса, выполненного например на микросхемах К 155 ИЕ 5, причем вход начальной установки блокациклического задания является входом сброса счетчика 17 адреса, вход синхронизации - входом синхронизации счетчика 7 адреса, выход которого соединен с адресным входом постоянного запоминающего устройства 6, выходом блокациклического задания является выход постоянного запоминающего устройства 16.Бгок 4 управления (фиг. 3) состоит иэ цифроаналогового преобразователя 18, регулирующего блока 19 и исполнительного устройства 20, вал которого является выходом блока 4 управления.Измеритель 3 рассогласования (фиг. 4) состоит из аналого-цифрового преобразователя 21, и сумматора 2, выполненного, например, на микросхемах К 55 ИИЗ. Применение сумматора 22 обусловлено тем, что измерительное устройство 6, включенное1 О в контур регулирования для реализации отрицательной обратной связи,производит инвертирование сигнала обратной связи,Сумматоры 2 и 8 (фиг. 2) аналогичны сумматору 22 (фиг. 4).Блок 7 деления при К=2 , где и==0,1,2,3 реализуется соответствующим смещением выходных разрядов относительно входных, причемстарший выходной разряд соединяетсясо всеми свободными старшими разрядными выходами.Регистры 9 и 11 реализуются, например, на микросхемах К 55 ИР 13.Запоминающее устройство 10 реализуется, например, последовательным соединением регистров К 155 ИР 13,входы сброса которых соединены свходом сброса запоминающего устрой -стна, а входы синхронизации параллельного переноса - с входом синхронизации запоминающего устройства.Задаюший генератор 12 реализуется в виде релаксационного генератора с элементом И на выходе, навторой вход которого подключаетсявыход блока 15 запуска.Элемент 13 задержки реализуется, например, последовательным соединением нескольких инверторовК 155 ЛН 1.Система работает следующим образом,Появление сигнала на выходе блока З 514 установки в исходное состояниевызывает начальную установку блока1 циклического задания (переход наначало программы) и сброс содержимого регистров 9 и 11 и эапоминаюшего 40устройства 10. Появление сигнала навыходе блока 15 запуска вызывает появление импульсов синхронизации навыходе задающего генератора 2.Поступление первого импульса на 45вход синхронизации блока 1 цикличес-кого задания, содержащего И значе 1ний сигнала задания, вызывает появление на его выходе первого цифрового сигнала задания, который через 50сумматор 2 (сигнал на выходе запоминающего устройства 10 равен нулю)поступает на первый вход блока 4управления и отрабатывается замкнутым контуром регулиронания, образованным блоком 4 управления, объектом 5 управления и измерительнымустройством 6. Результат отработки сигнала задания снимается с выхода. измерительного устройства 6 и поступает на второй вход измерителя 3 рассогласования, где сравнивается с сигналом задания, поступающим на его первый вход, Результат сравнения(ошибка) в цифровом виде поступает на вход блока 7 деления с коэффициентом передачи, равным К. Часть сигнала ошибки системы автоматического управления через сумматор 8 (сигнал на выходе второго регистра 11 равен нулю) поступает на информационный вход первого регистра 9 (для простоты описания далее полагаем коэффициент передачи блока деления 7 равным единице).Через интервал времени, равныйимпульс синхронизации с выхода задающего генератора 12 через блок 13 задержки поступает на вход записи первого регистра 9, н результате чего происходит запись сигнала ошибки в первый регистр 9, На этом заканчивается первый период квантования.Поступление второго импульса с выхода задающего генератора 12 вызывает поступление на вход блока 4 управления второго сигнала задания и запись в запоминающее устройство О содержимого первогорегистра 9,ачерез интернал времени, равный Т - запись в первый регистр 9 нового значения ошибки .Отработка следующих импульсов задающего генератора 2 происходит аналогично, при этом происходит продвижение содержимого запоминакчцего устройства 10 к его выходу так, что поступление Х-го импульса синхрон 1- зации приводит к полному заполнению запоминающего устройства О, На его выходе появляется значение сигнала ошибки, измеренное на первом периоде квантования, и поступает на второй вход сумматора 2, В результате на вход блока 4 управления поступает сигнал управления, ранный сумме текущего сигнала задания и сигнала компенсации ошибки при отработке следующего сигнала задания (на данном периоде квантования - при отработке первого сигнала задания следующего цикла управления). Этим достигается опережение компенсации по отношению к измерению, что необходимо для осуществления синхронизации процесса компенсации. На этом заканчивается первый цикл управления.Поступление следующего, (И+ +1)-го,импульса с выхода задающего генератора 12 вызывает появление ца выходе блокациклического зада-ция первого сигнала задания, запись во второй регистр 11 предыдущего сигнала компенсации ошибки и появление на выходе запоминающего устройства 10 нового сигнала компенсации ошибки. Сигналы задания и компенсации складываются первым сумматором 2 и поступают на первый вход блока 4 управления. Как и на предыдущих периодах квантования, сигнал ошибки снимается с выхода измерителя 3 рассогласования и через блок 7 деления поступает на первый вход второго сумматора 8, на второй вход которого поступает предыдущий сигнал компенса ции с выхода второго регистра 11. Через интервал времени, равный Т, производится запись нового значения компецсационногосигнала свыхода второго сумматора 8 впервый регистр 9.Следующие импульсы синхронизации отрабатываются системой аналогично отработке (И+1)-го импульса.Таким образом, при К с 1 обеспечивается итерационный процесс компен- ЗО сации ошибки системЫ циклического управления при циклическом изменении управляющих ноздействий, а также синхронных сними возмущающих воздействие.Передаточная функция по ошибке 35 системы циклического управления (от выхода объекта 5 управления к входу измерителя 3 рассогласования) оп" ределяется выражениемР 11Циклические воздействия, приложенные к системе. циклического управления, разлагаются в ряд Фурье с частотными составляющимигде и"0,1,2 - номер гармоники.Так как Т=И Т, то после замены 7- =е" тв выражении (1) (справедливом 55 до частОты .0=/Т) видно, что в данной системе циклического управления происходит компенсация частотных сос тавляющих ошибки от возмущений с номером гармоники 0иЫ/2.Иа фиг. 6 представлена амплитудно-частотцая характеристика второго сомножителя выражения (1) при И=30, 2 п/(Т "3,).=3 К=0,25, .1="1/,) где -1, - частота среза контура регулирования.Технические преимущества предлагаемого устройства по сравнению с известным видны ца примере отработки линейно нарастающего задающего воздействия. Кривая 23 ца фиг. 5 график установившегося процесса при настройке контура регулирования на оптимум по модулю и частоте квантования, в два раза большей частоты среза. Из этого графика видно, что н данной системе установившийся процесс проходит через заданные точки А ,АА, а максимальная ошибка) Фе составляет 1/ч часть ступеньки зайдания. Сравнение с результатом отработки линейно нарастающего задающего воздействия н известной системе (кривая 24, фиг. 5) показывает, что динамическая точность данной системы повышается нраза.Ф о р м у и а и э о б р е т е н и яСистема управления, содержащая последовательно соединенные блок циклического задания, первый сумматор, блок управления, объект управления и измерительное устройство, подключенное выходом к второму входу блока управления и к первому входу измерителя рассогласования, соединенного ныходом через блок деления с первым входом второго сумматора, а вторым входом - с выходом блока циклического задания, подключенного входом начальной установки к выходу блока установки в исходное состояние и к входу сброса запоминающего устройства, соединенного выходом с вторым входом первого сумматора, а входом синхронизации - с входом блока задержки, с входом синхронизации блока циклического задания и с выходом задающего генератора, подключенного входом к выходу блока запуска, о т л ич а ю щ а я с я тем, что, с целью поньппеция динамической точности системы, в ней дополнительно установлены первый и второй регистры, причем.Веселовская Техред О.Гортвай Реда Корректор Е.Р Заказ 2984/50 Тираж 836 ВНИИНИ Государственного коми по делам изобретений и отк 113035, Москва, Ж, Раушская иПодписна СССРий афическое предприятие, г. Ужгород, ул. Проектна роизводственно информационный вход первого регистра соединен с выходом, второго сумматора, вход сброса - с выходом блокаустановки в исходное состояние ивходом сброса второго регистра, входзаписи - с выходом блока задержки,а выход - с информационным входом 0 8запоминающего устройства, подключенного выходом к информационному входувторого регистра, соединенноговходом записи с выходом задающего генератора, а выходом - свторым входом второго сумматора.
СмотретьЗаявка
3817007, 23.11.1984
ЛЕНИНГРАДСКИЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
МИХАЛЬЧЕНОК ГЕРМАН ФЕДОРОВИЧ, НОВИКОВ ВЛАДИСЛАВ АЛЕКСАНДРОВИЧ, СИДОРОВИЧ ЕВГЕНИЙ АНДРЕЕВИЧ, СУСЛОВ ВАЛЕРИЙ ЕВГЕНЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки:
Опубликовано: 30.05.1986
Код ссылки
<a href="https://patents.su/5-1234810-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для моделирования системы охлаждения двигателя внутреннего сгорания

Номер патента: 1466539
Опубликовано: 30.03.1993
МПК: G06G 7/57
Метки: внутреннего, двигателя, моделирования, охлаждения, сгорания, системы
...образом, устройство моделирует работу системы охлаждения двигателя при наличии в ней термостата.Установка начальных условий, т.е, задание температуры окружающей среды, осуществляется с помощью переключателя 4, который с помощью ключей 12 и 18 подключает опорное напряжение на соответствующие входы компараторов 11 и 22, настроенные на различные напряжения, пропорциональные температуре окружающей среды, При исходном положении переключателя 4 ключи 12 и 18 разомкнуты, следовательно, компараторы 11 и 22 работают,как нуль-органы,1.е. они перебрасываются в другую полярность при малейшем изменении напряжения на первых входах в ту или иную полярность.На первые входы компараторов 11 и 22 подаются напряжения соответственно Отжд и Ожр. Зэ...
Устройство для контроля системы синхронизации параллельных вычислений

Номер патента: 1229763
Опубликовано: 07.05.1986
Авторы: Герасименко, Тимонькин, Ткаченко, Харченко
МПК: G06F 11/00
Метки: вычислений, параллельных, синхронизации, системы
...7 (кода номера семафора) для дешифрации кода номера семафора, над которым выполняется Р или Н операция. Схема 8. сравнения предназначена для проверки на равенство инвариантного соотношения (3), триггер 9 ошибки - для формирования сигнала ошибки в работе системы синхронизации. Элементы И 10 и 11 используются для выбора счетчиков для изменения значений соответствующих семафоров при выполнении над ними Р и Н операций соответственно.Вход 14 команды предназначен для приема кода команды на выполнение Р или Ч операции над указанным в этой команде номером соответствующего семафора. Первая группа 15 информационных входов используется для приема начальных значений соответствующих семафоров, вторая группа 16 информационных входов - для приема...
Устройство для формирования импульсов синхронизации при воспроизведении с носителя магнитной записи

Номер патента: 898498
Опубликовано: 15.01.1982
Авторы: Орлович, Фомкин, Чехлай, Чуманов
МПК: G11B 5/09
Метки: воспроизведении, записи, импульсов, магнитной, носителя, синхронизации, формирования
...1 О 1 шинн 1 воспроизведенного подключена также по входу мплитудного дискриминатоПредложенное устройство в процессе воспроизведения с носителя магнитной записи производит формирование импульсов синхронизации, которые он выделяет из воспроизведенного сигнала. В случае выпадения воспроизведенного сигнала обеспечивает формирование импульсов 1воспроизведения, частота следования которых равна его частоте до начала этого выпадения,Использование изобретения позволяет в значительной степени уменьшить погрешность формирования импульсов синхронизации при воспроизведении с носителя мамагнитной записи. формула изобретенияУстройство содержит входную шину 1 воспроизведенного сигнала, подключенную . ко входу демодулятора 2, и генератора 3 импульсов,...
Блок задания времени для обучающего устройства

Номер патента: 1332358
Опубликовано: 23.08.1987
МПК: G09B 7/02
Метки: блок, времени, задания, обучающего, устройства
...на другие входыкоторых поступают сигналы с единичных и нулевых выходов триггеров 3счетчика 2, Половина элементов 6, д 5соответствующая значению данного разряда, будет подготовлена к открытиюсигналом с выхода шифратора 5, а другая половина будет закрыта.При заполнении счетчика 2 на выходах элементов 6 появляются сигналы. В момент, когда в счетчике 2 будет записано число, равное коэффици,енту пересчета, на выходах всех эле-,ментов 6 появляются сигналы, и послеокончания импульса генератора 1 срабатывает элемент 7, а на выходеблока появляется сигнал, Этот жесигнал поступает на вход элемента 8,и через время необходимой задержкина его выходе появляется сигнал, который поступает на вход регистра 11,при котором единичный потенциал спервого...
Устройство для автоматической установки заданного отношения сигнал-шум

Номер патента: 1298697
Опубликовано: 23.03.1987
МПК: G01R 29/26
Метки: автоматической, заданного, отношения, сигнал-шум, установки
...мощности суммарного сигнала (равной Р ,) и мощности собственных шумов (равной 1- Р ), т.е. На третьем этапе работы в результате сброса триггера 24 снимается сигнал с пятого выхода блока 13 управления, восстанавливая тем самым5 1298697 исходное значение (К ) коэффициента усиления приемного блока 5. Кроме того, через время ь 1 необходимое для окончания переходного процесса в измерителе 6 и определяемое блоком 18 задержки, сигнал управления (фиг. Зд) с его выхода в момент времени 1 поступает на вход генератора 29 одиночных импульсов и на вход блока 19 задержки. В результате этого 1 О формируется одиночный импульс на седьмом выходе блока 13 управления, которий поступает на второй ключ 9 и приводит к запоминанию величины (11 ) выходного...
Предыдущий патент: Задатчик скорости
Следующий патент: Цифровая система управления
Случайный патент: Гидравлическая разгрузочная пята