Устройство для управления адаптивнымроботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
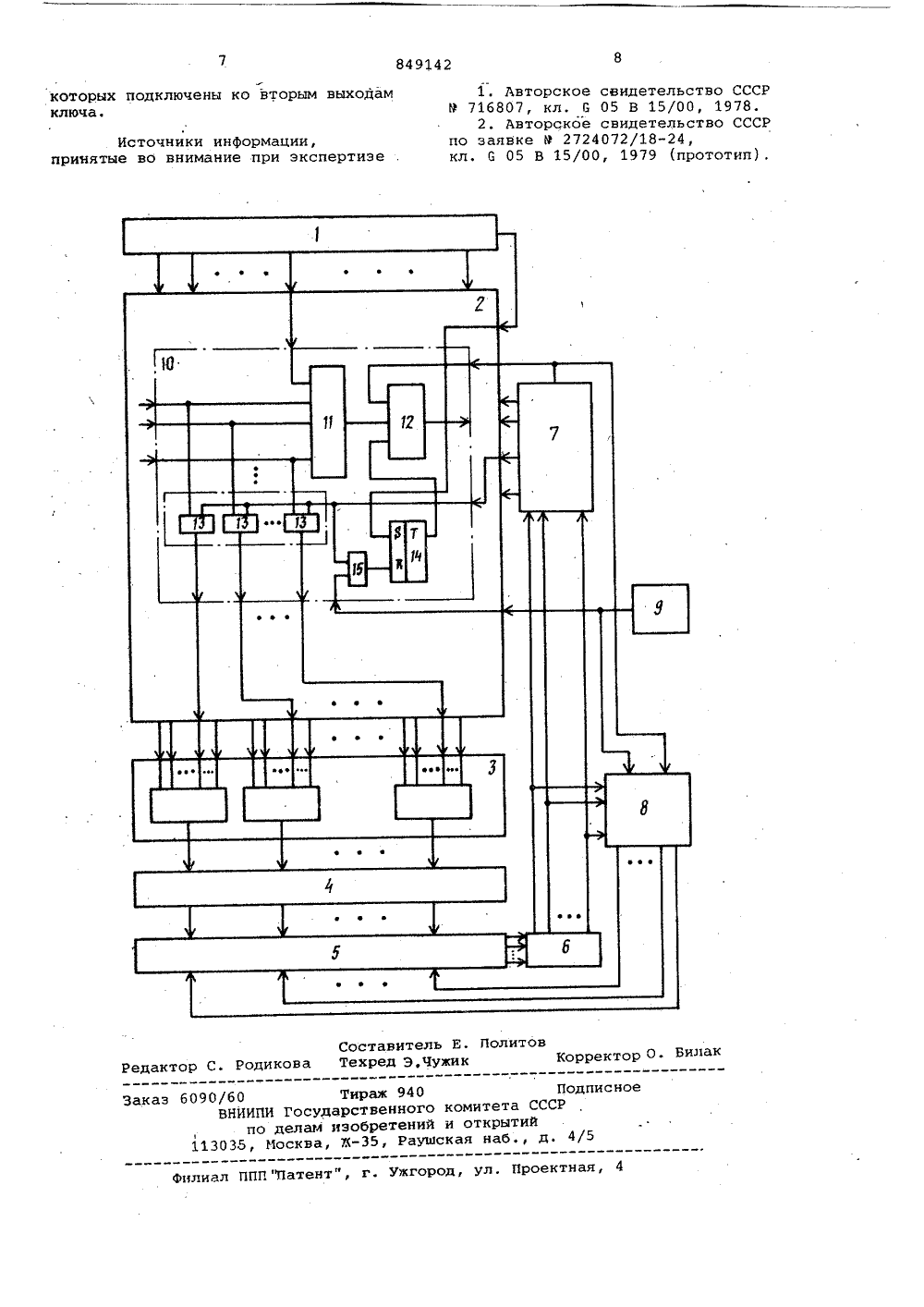
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советскик .СоциалистическихРеснублнк К АВТОУСКОМУ СВИ ЕТЕЛЬСТВУ(51)М. Кл.э6 05 В 15/00 В 25 д 13/00 с присоединением заявки Йо(23) Приоритет -Государственный комитет СССР но делам изобретений и открытий(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИИ АДАПТИВНЫМ РОБОТОМ Изобретение относится к робототехнике и может быть использовано при создании адаптивных робототехнических систем, функционирующих в среде с органиченной видимостью.5Известно устройство для управления адаптивным роботом, содержащее блок сенсорных элементов, блок форглирования модели внешней среды, вычислительный блок, многостабильный триггер, приводы и датчики положения Г 13 .Однако такое устройство невозможно применять для работы в условиях ограниченной видимости. 15Наиболее близким по технической сущности к предлагаемому является устройство, содержащее последовательно соединенные тактыльный датчик, вычислительный блок, блок элементов 20 ИЛИ, многостабильный триггер, приводы, датчики пологхения и дешифратор положения, первые и второй выходы которого подключены соответственно ко второму и третьему входам вычислитель ного блока Г 2Однако известное устройство не обеспечивает управление многостепен- ным исполнительным органом робота в условиях ограниченной видимости. 30 Цель изобретения - расширение функциональных возможностей устройства.Поставленная цель достигается тем,что устройство содержит блок заданияцели и блок возврата в предыдущее положение, первые входы которого соединены с выходами датчиков положения,второй вход - со вторым выходом дешифратора положений, третий вход - с выходом тактильного датчика, а выходы -со вторыми входами приводов, первыеи второй выходы блока задания целиподключены соответственно к четвертым и пятому входам вычислительногоблока,При этом вычислительный блок содержит и ключей, первый, второй, третий, четвертый и пятый входы каждогоиз которых соединены с одноименнымивходами вычислительного блока, пер-.вый выход каждого ключа подключен ксоответствующему шестому входу В соседних ключей, а вторые выходы - квыходам вычислительного блока, причем пВ.Крогле того, каждый ключ содерхитпоследовательно соединенные элементИЛИ и первый элемент И, а также вторые элеМенты И, триггер и третийэлемент И, первый вход которого подклвчен к первому входу ключа, второй вход - ко второму входу ключаи первым входам вторых элементов И,а выход - к первому входу триггера,соединенного вторым входом с пятымвходом ключа, а выходом - со вторымвходом первого элемента И, третийвход которого подключен к,третьемувходу клича, а выход - к первому выходу ключа, первый вход элемента ИЛИсоединен с четвертым входом ключа, авторые входы - с шестыми входами ключа и,вторыми входами вторых элементов И, выходы которых подключены ковторым выходам ключа.На чертеже представлена функциональная схема предлагаемого устройства,Устройство содержит блок 1 задания целей вычислительный блок 2,блок 3 элементов ИЛИ, многостабильный триггер 4, приводы.5, датчики бполокения, дешифратор 7 положений,блок 8 воэврата в предыдущее положение, тактильный датчик 9, ключи 10,элемент ИЛИ 11, первый элемент И 12,вторые элементы И 13, триггер 14,третий элемент И 15.Устройство управления работаетследувщим образом.Перед началом работы всего устройства на втором выходе блока 1 задания целей появляется кратковременныйсигнал, который поступает на пятыевходы всех ключей 10 и устанавливает триггеры 14 этих ключей в единичное состояние. Перед выполнением каждого элементарного акта движения навтором выходе дешифратора 7 полокений появляется кратковременный запрещающий сигнал, который поступаетна третьи входы первых элементов И12 всех ключей и блокирует их.Ключи 10, соответствующие конечным целевым положениям, выделяютсяблоком 1 задания целей. При этомпоследний Формирует на информационном четвертом входе ключа 10 единичный сигнал, в результате чего данныйключ 10 становится генератором сигнала возбуждения, который поступаетна логические входы 2 соседних ключей10 после снятия общего запрещающегосигнала с второго выхода дешифратора 7 положения.Дешифратор 7 полонений Формируетна ссновании информации, поступаемойот датчиков б положений, единичныйсигнал на втором входе того ключа 10,который соответствует текущему положению манипулятора. При этом вторыеэлементы И 13 данного ключа 10 открываются и тем самым пропускаютсигналы, поступающие на шестые входыданного ключа 10 через соответствующие элементы ИЛИ блока 3 на входымногостабильного триггера 4, так жеоткрывается при этом третий элементИ 15 этого же ключа 10 и подготавливается для пропускания на нулевойвход триггера 14 единичного сигнала, который может прийти от тактильного датчика 9 в случае соприкосновения манипулятора с препятствием врабочей зоне.Такая организация вычислительногоблока 2 приводит к тому, что послеокончания общего запрещающего сигнала ключ 10, соответствующий конечному положению манипулятора, начинает/передавать сигнал возбукдения на ло-гические входы соседних ключей 10,который, распространяясь по ключам10, достигает логические входы ключа10, соответствуюцего текущему поло 15 жению. Очевидно, что первым на одномиз логических входов этого ключа 10появляется тот сигнал, который прошел по кратчайшему пути от генерирувщего ключа 10. Пройдя через один20 из вторых элементов И 13 ключа 10,соответствующего текущему положению.манипулятора, и соответствующий элемент ИЛИ блока 3, этот сигнал устанавливает моностабильный триггер 4р в состояние, соответствующее направлению, со стороны которого прошелпервый сигнал возбуждения. Последующие сигналы, приходящие на другиевходы многостабильного триггера 4 непо кратчайшему пути, состояния многостабильного триггера 4 не изменяют,Таким образом, путь первого сигнала является воспроизводимой в вычислительном блоке 2 моделью кратчайшего пути от текущего положения манипулятора к конечному. Фиксацияпервого сигнала соответствует актупринятия решения, заключающегося ввыборе того направления, в котором40 нужно совершать перемещение манипулятору, с тем, чтобы по кратчайшемупути достичь конечное целевое положение. Состояние многостабильноготриггера 4 сохраняется до тех пор,4 пока приводы 5 не отработают элементарного шага движения. Окончаниеэлементарного шага движения Фиксируется датчиками б положения, Приэтом информация об отработке элементарного шага движения от датчиков бположения запоминается в блоке 8возврата в предыдущее положение, адешифратор 7 положения выбирает следующий ключ 10, соответствующий новому текущему положению манипулято 55 ра, и вырабатывает кратковременныйзапрещающий сигнал на своем второмвыходе, тем самым блокируя всю сеть.При этом многостабильный триггер 4возвращается в исходноесостояние,р) и все описанные операции повторяются до тех пор, пока манипулятор недостигнет конечного положения.Если после перехода из предыдущего положения манипулятора в новоеу положение происходит соприкосновениес препятствием, то тактильный датчик 9 вырабатывает сигнал, который переводит триггер 14 ключа 10, соответствующего текущему положению, внулевое состояние, в результате чего на единичном выходе триггера 14появляется нулевой сигнал, которыйпоступает на вход первого элемента И12 и закрывает его, при этом даннаяячейка переходит в заблокированное) состояние. При этом также по сигналу от тактильного датчика 9 срабатывает . блок 8 возврата в предыдущее положение и вырабатывает на основании ранеезапомненной информации о предыдущем шаге сигналы, которые, поступая на приводы 5,. возвращают манипулятор в предыдущее положение.Окончание, отработки элементарного шага возврата также фиксируется датчиками б положения и, следовательно,дешифратором 7 положений, которыйвырабатывает запрещающий сигнал насвоем втором выходе и тем самым превого шага и отработка его приводами5 возобновляется, но уже при условии, что ключ 10, соответствующийположению манипулятора, в котором 30 он имеет общие точки с препятствием,будет заблокирован. При этом моделируемые вычислительным блоком 2 путиуже не проходят через ключ 10, соответствующий запрещенному положению,и, следовательно, манипулятор не 35 попадает в данное запрещенное положение.После некоторого времени функционирования в результате соприкосновения манипулятора с препятствиями, блокируется множество ключевых элементов, соответствующих положениям манипулятора, в которых он имеет общие точки с существующими в рабочей зоне манипулятора препятствиями. Пос ле этого. манипулятор функционирует в данной рабочей зоне, не соприкаса 40 ясь с препятствиями, т.е. устройство управления как бы адаптируется к данной ситуации в рабочей зоне манипулятора и после этой адаптации управляет манипулятором без соприкосновений с препятствиями.При изменении ситуации в рабочей зоне например, если манипулятор закреплен на транспортном средстве, которое переместилось в .другой участок внешней среды) процесс адаптации происходит заново, так как препятствия в другом участке:внешней среды имеют другие размеры и другие координа Ц ты. Перед функционированием манипулятора в новой ситуации происходит установка всех кличей 10 вычислительного блока 2 в незаблокированное состояние путем подачи на единичные Я кращает работу блока возврата в предыдущее полокение,После этого процедура моделирова ния кратчайшего пути, выделения первходы триггеров 14 всех ключей 10 кратковременного единичного сигнала от второго выхода блока 1 задания целей. Затем устройство функционирует так, как описано выше.Применение предлагаемого устройства позволяет расширить его функциональные возможности за счет обеспечения управления многостепенным манипулятором робота в среде с ограниченной видимостью.Формула изобретения1. Устройство для управления адап" тивным роботом, содержащее последовательно соединенные тактильный датчик, вычислительный блок, блок элементов ИЛИ, многостабильный триггер, приводы, датчики положения и дешифратор положений, первые и второй выходы которого подключены соответственно ко вторым и третьему входам вычислительного блока, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных воэможностей устройства, оно содержит блок задания цели и блок возврата в предыдущее положение, первые входы которого соединены с выходами датчиков положения, второй вход - со вторым выходом дешифратора положения, третий вход - с выходом тактильного датчика, а выходы - со вторыми входами приводов, первые и второй выходы блока задания цели подключены соответственно к четвертым и пятому входам вычислительного блока.12. Устройство по и. 1, о т л и - ч а ю щ е е с я тем, что вычислитель ный блок содержит и ключей, первый, второй, третий, четвертый и пятый входы каждого из которых соединены с одноименными входами вычислительного блока, первый выход каждого ключа подключен к соответствующему шестому входу К соседних ключей, а вторые выходы - к выходам вычислительного блока, причем п)В.Зе Устройство попп. 1 и 2, о т л ич а ю щ е е с я тем, что каждый ключ содержит последовательно соединенные элемент ИЛИ и первый элемент И, а также вторые элемЕнты И, триггер и третий элемент И, первый вход которого подключен к первому входу ключа, второй входко второму входу ключа лл первым входам вторых элементов И, а выход - к первому входу триггера, соединенного вторым входом с пятым входом ключа, а выходом - со вторым входом первого элемента И, третий вход которого подключен к третьему входу ключа, а выход - к первому выходу ключа,"первый вход элемента ИЛИ соединен с четвертым входом ключа, а вторые входы - с шестыми входами ключа и вторыми входами вторых элементов И, выходы849142 Составитель Е, Политоводикова Техред Э,ЧужикКорректор О. Бил Редак аказ 6090/60 Тираж 940 Подписное ВНИИПИ Государственного комитета СССР по делаю 4 изобретений и открытий 113035, Москва, й, Раушская наб д, 4/5филиал ППП "Патент", г. Ужгород, ул, Проектная,которых подключены ко вторым выходамключа. Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 716807, кл. 8 05 В 15/00, 1978.2. Авторское свидетельство СССРпо заявке У 2724072/18-24,кл. С 05 В 15/00, 1979 (прототип),
СмотретьЗаявка
2794972, 04.06.1979
ТАГАНРОГСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТИМ. B. Д. КАЛМЫКОВА, ПРЕДПРИЯТИЕ ПЯ B-2749
КАЛЯЕВ АНАТОЛИЙ ВАСИЛЬЕВИЧ, НОСКОВ ВЛАДИМИР ПЕТРОВИЧ, ФОМИЧЕВ НИКОЛАЙ ИВАНОВИЧ, ЧЕРНУХИН ЮРИЙ ВИКТОРОВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: адаптивнымроботом
Опубликовано: 23.07.1981
Код ссылки
<a href="https://patents.su/4-849142-ustrojjstvo-dlya-upravleniya-adaptivnymrobotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивнымроботом</a>
Измеритель мощности

Номер патента: 798612
Опубликовано: 23.01.1981
МПК: G01R 21/10
Метки: измеритель, мощности
...8612 4входы реверсивного счетчика 23, и второй вход элемента И 22 соединены с соответствующими выходами блока 20 управления, выход генератора 21 соединен с третьим входом элемента И 22, выход которого соединен с синхронизирующим входом реверсивного счетчика 23, выход которого соединен с шиной 26 выходного сигнала, выходы блоке 17 соединены соответственно с управляющими входами ключей 4-7, второй вывод ключа 3 соединен через ключи 4 и 5 с источниками 16-1 и 16-2, третий вывод ключа 3 соединен через ключи 6 и 7 с источниками 16-1 и 16-2Измеритель мощности работаетследующим образом.На первом такте ключи 2 и 3 находятся в положении, при котором вход электротермического преобразователя 1 соединен через резистор 8 с шиной 24, на которую...
Блок датчиков положения штурвала самолета
Номер патента: 1001610
Опубликовано: 27.01.1996
Авторы: Войтко, Крыгин, Маслов, Русаков
МПК: B64C 13/34
Метки: блок, датчиков, положения, самолета, штурвала
БЛОК ДАТЧИКОВ ПОЛОЖЕНИЯ ШТУРВАЛА САМОЛЕТА, содержащий входной вал с жестко закрепленным на нем приводным элементом, выходные валы, на каждом из которых установлены зубчатое колесо и ограничитель поворота, отличающийся тем, что, с целью повышения надежности работы блока, зубчатые колеса и ограничители поворота жестко закреплены на выходных валах, приводной элемент выполнен в виде разнесенных вдоль оси входного вала двух зубчатых и двух цилиндрических секторов, взаимодействующих с соответствующими зубчатыми колесами и ограничителями поворота, каждый из которых выполнен в виде двух упоров с цилиндрической рабочей поверхностью, концентричной поверхности сопрягаемого с ним цилиндрического сектора, причем центральный угол между упорами равен...
Устройство формирования сигнала управления фазовым положением блока вращающихся головок

Номер патента: 1277190
Опубликовано: 15.12.1986
МПК: G11B 5/48
Метки: блока, вращающихся, головок, положением, сигнала, фазовым, формирования
...которым одновибратор 7 переводится в состояние, при котором на его выходе устанавливается сигнал логической единицы. При несовпадении воспроизведенных и стробирующих импульсов сигналлогической единицы устанавливаетсяна выходе одновибратора 8,.при этомна входах элемента ИЛИ 12 устанавливаются сигналы логического нуля и навыходной шине 14 Формируется сигналкоманды на фазирование блока вращающихся головок, При совпадении воспроизведенных и стробирующих импульсов сигналом логической единицы свыхода одновибратора 7 через элементИЛИ 12 на вьгходной шине 14 формируется сигнал команды на прекращениеФаэирования блока вращающихся головок. При выпадении импульсов цветовой синхронизации в воспроизведенном сигнале на выходах одновибраторов 7 и 8...
Устройство для отработки положения пишущего элемента приемного аппарата «телеавтограф»

Номер патента: 290466
Опубликовано: 01.01.1971
Авторы: Егорычев, Лесничий, Лизко, Таласо
МПК: H04L 1/04
Метки: «телеавтограф», аппарата, отработки, пишущего, положения, приемного, элемента
...частот. Это приводит к уменьшению 10 наклона дцскрцмпнаторной характеристикиустройства, цз-за чего происходит потеря чувствительности схемы сравнения ц ухудшаются динамические качества всего прибора.Целью данного изобретения является обе спечение высокой чувствительности схемьсравнения частот, обеспечивающей высокую точность воспроизведения рукописного текста независимо от полосы захвата частоты координатного генератора, что достигается введе нцем в устройство двух дополнительных узловрегулятора амплитуды сигнала захвата и индикатора бценцц, позволяющих придать приемному аппарату Тел еавтограф свойство самонастройки в смысле сохранения оптц мального соотношения между чувствителькостью и шириной полосы захвата частоты.На...
Устройство для управления положением исполнительных элементов

Номер патента: 1045222
Опубликовано: 30.09.1983
Авторы: Сенатский, Шпилевой, Южаков, Якушев
МПК: G05B 19/19
Метки: исполнительных, положением, элементов
...через элементы И 14 или 15, 16или 17, С выходов элементов И 16 и17 синхроимпульсы проходят в блок33 управления шаговым двигателем не"посредственно через соответствующийэлемент ИЛИ-НЕ 10 и 11, а с выходовэлементов И 14 и 15 поступают еще ичерез делители частоты 27 и 28. Этоприводит к тому, что при значительном смещении пятна от центра КФП 1(когда срабатывают компараторы 7или 8) шаговый двигатель будет отрабатывать шаги и корректировать положение оптического элемента, проектирующего пучок на КФП 1, на частоте поступления сиихроимпульсов. По мере возврата пятна в заданное положение т.е. в центр КФП 1), амплитуда сигналов на выходе дифференциального усилителя 2 уменьшается,.а зависимость ее от рыскания пятна по поверхности КФП 1...
Предыдущий патент: Регулятор с переменной структурой
Следующий патент: Устройство для программного управления
Случайный патент: Горизонтальный роторный тонкопленочный испаритель