Индукционное устройство для груп-пового вождения широкозахватныхтракторных агрегатов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
Союз СоветскикСоцналнстнческкиРеспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ц 829001ло делам изобретеиий к отаоытий(54) ИНДУКЦИОННОЕ УСТРОЙСТВО ДЛЯ ГРУППОВОГО ВОЖДЕН ШИРОКОЗАХВАТ 1 ЫХ ТРАКТОРНЫХ АГРЕГАТОВ отно Изобрете зяйственном быть исполь равлении не тся к сельскохороению и может я шино упповом упкторнымн аг овано пр колькими регатам им трактористом. дла Известны индукционные устройствая группового вождения тракторных грегатов, содержащие генератор переменного тока с излучателем, устана 10 вливаемые на ведущем агрегате ,и измерительно-регулирующий блок с приемной антенной, устанавливаемые на ведомом агрегате. Поперечное смещение ведомого агрегата относительно ведущего достигается установкой излучателя и антенны на выносных брусьях таким образом, чтобы излучатель и антенна располагались на прямой, параллельной направлению движения агрегатов, н были смещены относительно продольных осей агрегатов на величину требуемого поперечного смещения агрегатов 1,Недостатком данных устройств является ограничение поперечного смещени агрегатов купиной выносных брусьев.Наиболее близким техническим решением к предлагаемому является индукционное устройство для группового вождения широкозахватных агрегатов, включающее генератор переменного напряжения с излучателем на ведущем агрегате и измерительно-регулирующий блок с приемной антенной на ведомом агрегате. Излучатель и антенна расположены на прямой, перпендикулярной к направлению движения агрегатов. Ивмерительно-регулирующий блок этого устройства включает источник компенсационного напряжения, схему сравнения выходного напряжения антенны с компенсационным исполнительным механизмом рулевого управления ведомого агрегата; При изменении расстояния между излучателем и антенной выходной сигнал последней изменяется, и связи с чем на выходе схемы сравнения3 829001 4 появляется напряжение ошибки автовож проекция излучателя 2 на продольную дения, поступающее на исполнительный ось ведомого агрегата расположена механизм и изменяющее направление дви- между магнитными вибраторами 6 и 8. жения ведомого агрегата в сторону Входы сумматора 10 соединены с выхоуменьшения рассогласования между вы- дами магнитных вибраторов 6 и 8 непо. ходным напряжением антенны,и компен- средственно, а с выходом магнитного сационннм напряжением 2вибратора 7 - через потенциометр 9,Недостатком этого устройства явля- регулирующий коэффициент передачи маг ется низкая точность вождения ведомо- . нитного вибратора. Выход сумматора О го агрегата при изменении продольного 1 О соединен с одним из входов схемы 11 расстояния между агрегатами, так какпоследнее приводит к перемещению ведомого агрегата относительно ведущего по дуге окружности, радиус которойравен требуемому поперечному смещению 15агрегатов. сравнения, второй вход которой соединен с выходом источника 12 компенсационного напряжения. Выход схемы 11сравнения соединен с входом исполнйтельного механизма 13 рулевого управпения ведомого агрегата. Устройство работает следующим образом. Излучатель 2, выполненный в видегоризонтального кругового витка созложения, то выходные напряжения вибраторов 6, 7 и 8 и сумматора 10 изменяется и на выходе схемы 1 сравненияпоявляется напряжение ошибки вождения,Это напряжение включает исполнительный механизм 13, который изменяетнаправление движения ведомого агрега 55 Цель изобретения - повышение точности вождения ведомого агрегата приизменении продольного расстояния между ведущим и ведомым агрегатами,Поставленная цель достигается тем,что антенна выполнена по крайней ме)ре в виде двух магнитных вибраторов и сумматора, входы ко=орогосоединены с выходами вибраторов,авыход сумматора является вьп.эдом антенны и соединен с входом измеритепьно-регулирующего блока,Кроме того, антенна содержит тримагнитных вибратора, причем два вибратора расположеы по прямой, параллельной оси ведомого агрегата, а третий вибратор расположен между нииии выполнен с регулируемым коэффициентом передачи.На фиг. 1 показано-взаимное расположение агрегатов при движении на.гоне на фиг. 2 - структурная схемаиндукционного устройства.На ведущем агрегате 1 расположенгенератор переменного напряжения сизлучателем 2, а на ведомом агрегате3 расположены приемная антенна 4 и,иэмерительно-регулирующий блок 5.Приемная антенна 4 содержит вибраторы 6, 7 и 8, потенциометр 9 и сумматор 1 О, а измерительно-регулирующийблок 5 содержит схему 11 сравнения,источник 12 компенсационного напряжеы,ния и исполнительньямеханизм 13 рулевого управления ведомого агрегата.Магнитные вибраторы 6 и 8 расположены на прямой, параллельной продольной оси ведомого агрегата 3, на рас- .стоянии М друг от друга. Магнитныйвибратор 7 расположен между первымидвумя (6 и 8). Рабочим является такоерасположение агрегатов, при котором дает в окружающем пространстве переменное магнитное поле, обладающее круговой симметрией, Напряженность этогополя в месте нахождения ведомого агрегата преобразуется вибраторами 6,7 и 8 в пропорциональные напряжения,которые поступают на входы сумматора10. Выходное напряжение сумматора 10равно сумме входных напряжений и за.висит прежде всего от поперечного смещения агрегатов, т. е. от координатыХ излучателя 2 в прямоугольной системе координат ХОУ, начало которой совмещено с центром вибратора 6, а оси 35ОХ и ОУ направлены соответственноперпендикулярно и параллельно нродольной оси ведомого агрегата. Это напряжение поступает на один из входовсхемы 11 сравнения, на второй вход 40которой поступает компенсационное напряжение с выхода истбчника 12, Еслифактическое значение поперечного сме"щения агрегатов равно требуемому значению, то выходное напряжение сумматора О равно компенсационному и напряжение на выходе схемь 11 сравненияотсутствует. При этом исполнительныймеханизм 13 рулевого управления выключен и ведомый агрегат движется взаданном направлении., Если же ведомыйагрегат отклоняется от требуемого по5 8290 та в сторону уменьшения ошибки автовождения.Потенциометр 9, регулирующий коэффициент передачи вибратора 7, целе:,сообразно снабдить шкалой, проградуированной непосредственно в метрахирины захвата агрегатов. Тогда пред"арительная накладка устройства на выполнение той или иной операции заключается в соответствующем взаимном расположении ведущего и ведомого агрегатов на гоне, установке движка потеициометра 9 в соответствии с фактической шириной захвата агрегатов и в Последующей компенсации выходного напряжения сумматора 10 компенсационным напряжением генератора 12 (выходным напряжением потенциометра 9).Положительный эффект предлагаемого изобретения заключается в повышении точности вождения ведомого агрегата, что улучшает качество выполнения технологических оие зий и повышает сбор урожая,О 6емной антенной на ведомом агрегате, причем излучатель и антенна расположены на прямой, перпендикулярной к направлению движения агрегатов, о т " л и ч а ю щ е е с я тем, что, с целью повышения точности вождения ведомого агрегата при изменении продольного расстояния между агрегатами, антенна выполнена по крайней мере в виде двух магнитных вибраторов и сумматора, входы которого соединены с выходами вибраторов, а выход сумматора является выходом антенны и соединен с входом измерительно-регулирующего блока.2. Устройство по п. 1, о т л и - ч а ю щ е е с я тем, что антенна содержит три магнитных вибратора, причем два вибратора расположены на прямой, параллельной оси ведомого агрегата, а третий вибратор расположен между ними и выполнен с регулируемым коэффициентом передачи.Формула изобретения 1. Индукционное устройство для группового вождения широкозахватных. тракторных агрегатов, включающее генератор переменного напряжения с излучателем на ведущем агрегате и измерительно-регулирующий блок с при 25Источники информации,принятые во внимание при экспертизе1, Автоматическое и дистанционноеуправление промьппленными тракторами,ЦНИИТЗИтракторсельхозмаш. И., 1972,36 г., Д 7,2. Автоматизация производственныхпроцессов в растениеводстве. ВИИ, И.,1978, с. 13 (прототип).829001 Составитель С,Мартынов актор Е.Дорошенко Техред А, Ач Кор аз 26 700 Зак атент , г, Уагород, ул, Проектная,ал 11 1 ВНИИПИ по д 113035, Тирам сударств ам изобр осква, Ж ного ком ений и о 5, Раушс Подписета СССРрытийя наб., д, 4/5
СмотретьЗаявка
2849635, 30.11.1979
СИБИРСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙИНСТИТУТ МЕХАНИЗАЦИИ И ЭЛЕКТРИ-ФИКАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА
КАЛЮЖНЫЙ АНАТОЛИЙ ТИМОФЕЕВИЧ, ЕМЕЛЬЯНОВ МИХАИЛ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: A01B 69/04
Метки: агрегатов, вождения, груп-пового, индукционное, широкозахватныхтракторных
Опубликовано: 15.05.1981
Код ссылки
<a href="https://patents.su/4-829001-indukcionnoe-ustrojjstvo-dlya-grup-povogo-vozhdeniya-shirokozakhvatnykhtraktornykh-agregatov.html" target="_blank" rel="follow" title="База патентов СССР">Индукционное устройство для груп-пового вождения широкозахватныхтракторных агрегатов</a>
Устройство для вождения широкозахватных машинно-тракторных агрегатов

Номер патента: 441005
Опубликовано: 30.08.1974
Авторы: Германовский, Красовский, Мизюков, Мухин, Сальников, Соловейчик, Токарев, Челозерцев, Шевцов, Яиков
МПК: A01B 69/04
Метки: агрегатов, вождения, машинно-тракторных, широкозахватных
...маркврного слвда А-А.Поинцйд работы дрвдлагавмого устройства состоит в слвдующвм.Во врвмя пврвого прохода посевного агрвгата, соввршаемого по ввшкам, слвдообразоватвль дрокладывавт слвд на той сторонв доля, гдв будвт вестись свв. Во врвмя второго и аослвдующих дроходов тракторист ввдвт трактор так, чтобы звркально-дврискодичвсков устройство было нацелено на проложвн- ныИ во время првдыдущвго дрохода слвд, который послв прохода агрвгата заравнивавтся загортачвм,Смвщвнив изображвния следа в звркалв 2 вдраво или влвво от цвнтра за дрвдвлы допуска отмвчвнного на звркалв лийиями, служит для тракториста сигналом о нвобходимости коррекции курса движвния агрегата,ПРЕДМЕТ ИЗОБРЕТЕНИЯУстройство для вождения широкозахватных машинно-тракторных...
Система автоматизированного вождения колесных машинно тракторных агрегатов

Номер патента: 1033033
Опубликовано: 07.08.1983
Авторы: Бубнов, Орлов, Тараторкин
МПК: A01B 69/04
Метки: автоматизированного, агрегатов, вождения, колесных, машинно, тракторных
...дешиФратора 72, а выходы элементов 4 И соединены между .собой и со входом двоично-десятичного счетчика импульсов 73, Счетчик 73 и дешифратор 72 соединены между собой. Первый и четвертый, второй и пятый выходы дешифратора 72 объединены и подключены к переключателю 1 режимов управления, шестой, выход дешнфратора 72 соединен с пе" реключателем.1 режимов управления, с звуковым генератором 74 через схему задержки 75 и с триггером 76 предназначенным для выдачи сигнааа, разрешающего пропускание логической схемой 2 И 77 счетных иипульеов от тактового генератора к счетчику 42, Каждий счетчик, соединенйьа с дешиФ ратором, образует счетную декаду, Логические элементы 4 Я 66-71; счетчик 73 и дешифратор 72 реализуют уии версальный алгоритм...
Способ дублерного вождения машинно-тракторных агрегатов

Номер патента: 1382417
Опубликовано: 23.03.1988
Авторы: Абушенко, Емельянов, Калюжный, Королев
МПК: A01B 69/04
Метки: агрегатов, вождения, дублерного, машинно-тракторных
...полосы, СРЕ - фактическая траектория ведущего агрегата при выходе с рабочего гона на поворотную полосу, АВЕ - требуемая траектория ведомого агрегата, АВ - дистанция между агрегатами, ВР - боковое смещение ведущего агрегата относительно продольной оси ведомого.По способу дублерного вождения по криволинейным траекториям осуществляют предварительное автономное вождение ведущего агрегата по траектории СРЕ, а ведомого " по траектории АВЕ, в процессе которого дистанцию поддерживают постоянной. В процессе этого вождения измеряют боковое смещение агрегатов и запоминают его мгновенные значения в функции пройденного агрегатами расстояния, например через 0,1 м. Если измеряют боковое смещение ведущего агрегата относительно продольной оси...
Способ распределения нагрузок между параллельного работающими агрегатами электростанции
Номер патента: 488300
Опубликовано: 15.10.1975
Авторы: Ахундов, Бартош, Петрова
МПК: H02P 9/04
Метки: агрегатами, между, нагрузок, параллельного, работающими, распределения, электростанции
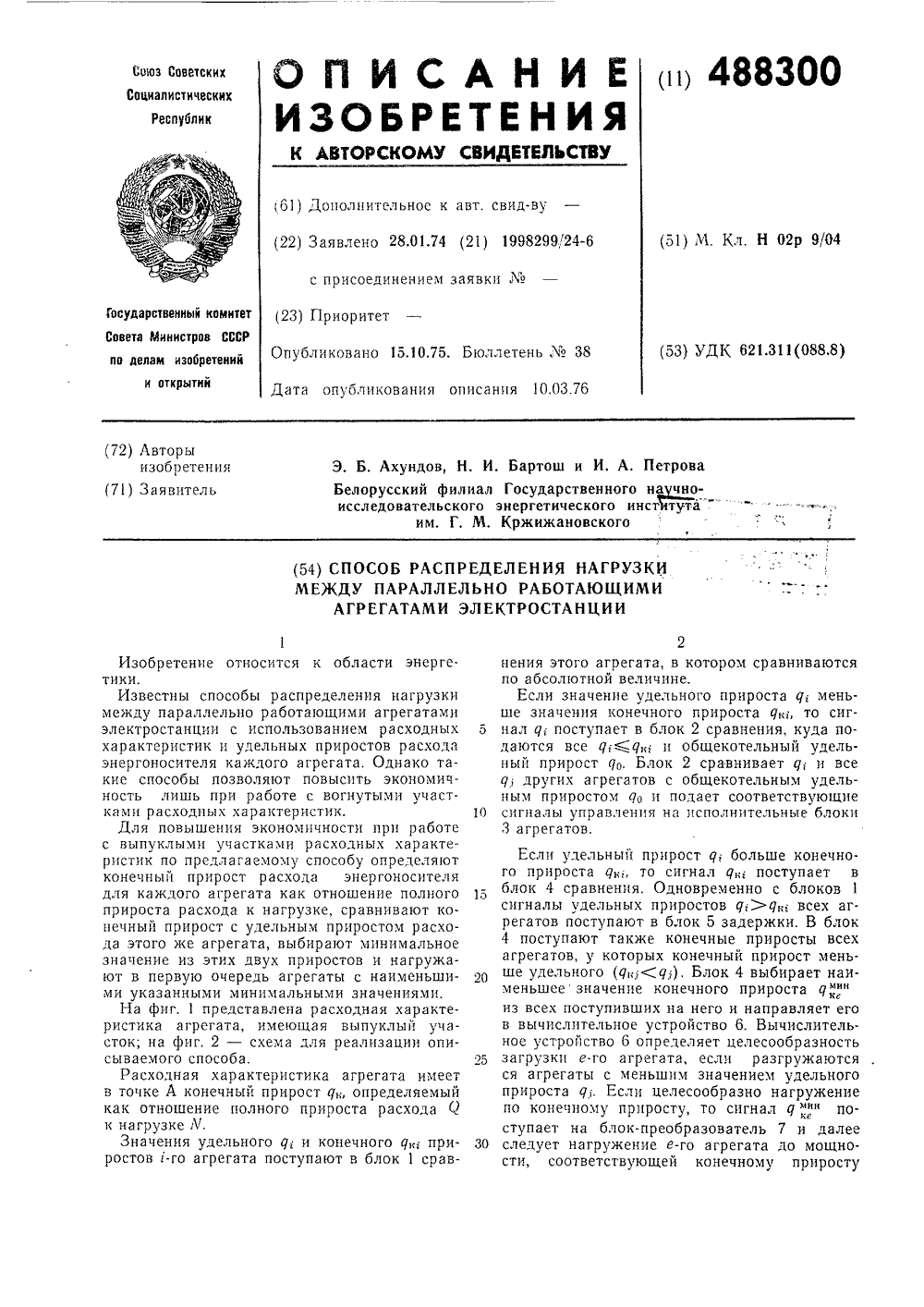
...Заявлено 28.01.74 (2 зобретение относится к области энергеИзвестны способы распределения нагрузки между параллельно работающими агрегатами электростанции с использованием расходных характеристик и удельных приростов расхода энергоносителя каждого агрегата, Однако такие способы позволяют повысить экономичность лишь при работе с вогнутыми участками расходных характеристик.Для повышения экономичности при работе с выпуклыми участками расходных характеристик по предлагаемому способу определяют конечный прирост расхода энергоносителя для каждого агрегата как отношение полного прироста расхода к нагрузке, сравнивают конечный прирост с удельным приростом расхода этого же агрегата, выбирают минимальное значение из этих двух приростов и...
Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе

Номер патента: 934942
Опубликовано: 15.06.1982
Авторы: Бубнов, Тараторкин
МПК: A01B 69/04
Метки: агрегата, вождения, гоне, колесного, машинно-тракторного, поворотной, полосе, рабочем
...(соответствующие блоки на чертеже не показаны), Происходит процесс автоматического вождения МТАна рабочем гоне, Если датчики 1 и 8 нахо.дятся над, бороздой базовой линии и.задерж.ка импульсов от них больше, чем от осталь.ных, то это.означает движение МТА точнопо заданной траектории, при этом формиро.ватели управляющих сигналов 25 и 26 выдают блоку сравнения 28 сигналы "Нуль", Еслибазовая линия в стороне и над ней оказывает.ся датчик в переднем ряду 5 - 7 - из правойчасти, а в заднем 12 - 14 - нз левой части,то формирователи 25 и 26 формируют положительный сигнал для поворота направляющих колес вправо; если над базовой линией оказывается один из датчиков 4, 3, 2 левой час.ти переднего ряда и один из датчиков 9, 10,11 из правой части...
Предыдущий патент: Устройство для автоматического вождениясельскохозяйственной машины
Следующий патент: Способ предпосевной обработки семян
Случайный патент: Способ разработки пологих угольныхпластов