Интерполятор для систем программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 658528
Автор: Кузьмин
Текст
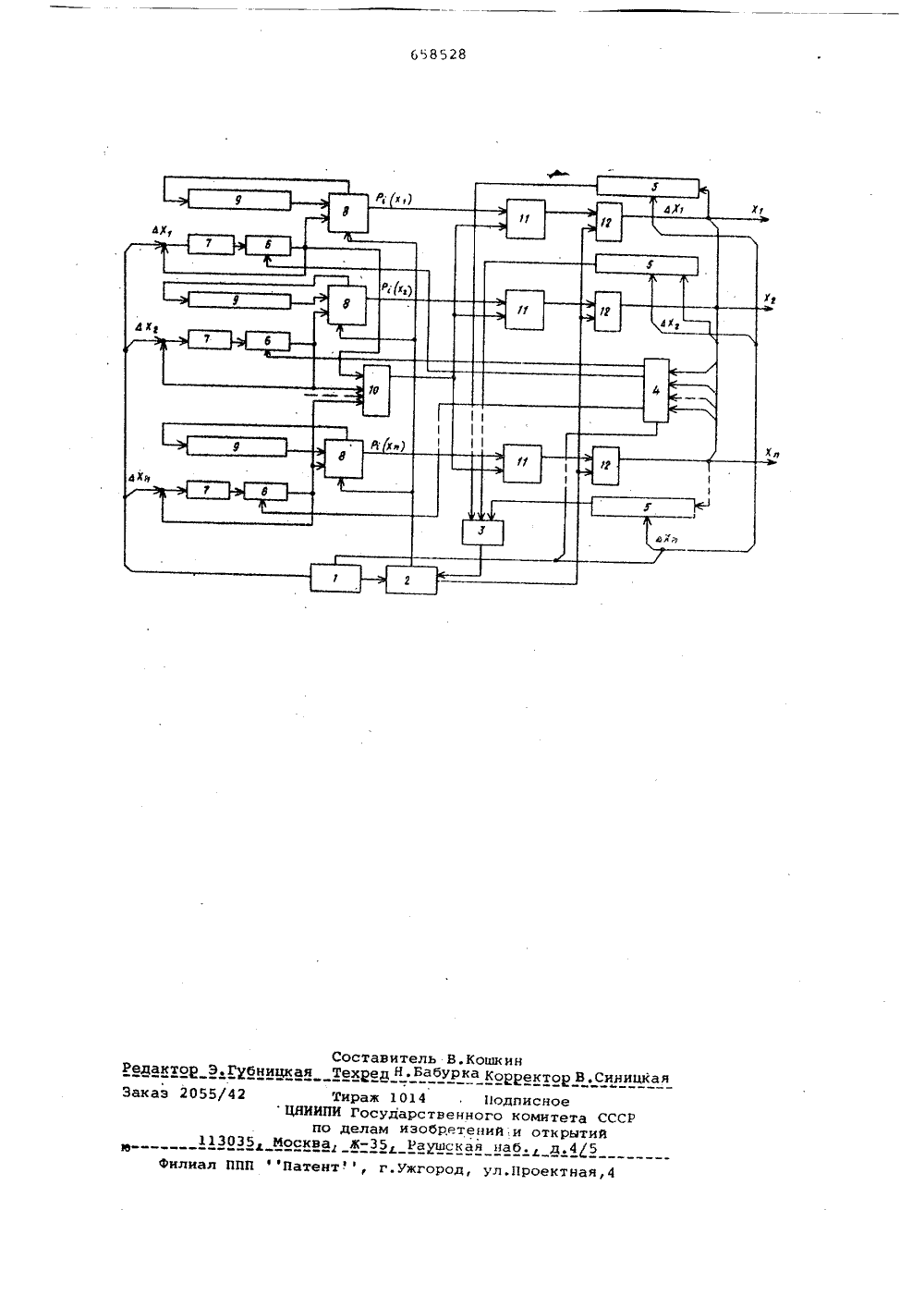
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ рц 658528 ю"д чайф(61) М, Кл. б 05 В 19/18 Государственный комитет сссР по дмам изобретений н открытий(71) Заявитель 54 ) ИНТЕРПОЛЯТОР ДЛЯ СИСТЕМ ПРОГРАММНОГО УПРАВЛЕНИЯИзобретение относится к области. автоматики и вычислительной техники и может быть использовано в системах программного управления станками,Известны интерполяторы, работающие по принципу цифровых дифференциальных анализаторов ЦЦА), построенные на сдвиговых регистрах, работающие в двоичной системе и содержащие специальные блоки определения старшего разряда регистра подынтегральной функции 11 и 2.Недостатком этих устройств является то, что реализация их требует значительного оборудования, они не учитывают возможного изменения значению подынтегральных Функций (их разРядности) на участке интерполяций, что снижает быстродействие интерполятора из-за необходимости работать с масштабом, рассчитанным для максимально возможной разрядности.Наиболее близким техническим решением к данному изобретению является интерполятор для систем программного управления, содержащий блок ввода программы, первый выход которого связан с первым вхо дом блока задания скорости, второй вход которого соединен с выходомпервого элемента И, коммутатори по каждой координате счетчикперемещений, первый регистр, сумматор и последовательно соединенные второй регистр и блок коррекции, выходы первого регистра и блока коррекции соединены с первыми вторым входами сумматора даннойкоординаты соответственно, первыйвыход сумматора связан со входомпервого регистра одноименной координаты, второй выход блока вводапрограммы подключен к первьи вхо дам счетчиков перемещений и коммутатора, выходы которого подсоединены к одним из входов блоковкоррекции, третий выход блока ввода программы связан со входами 4 ф вторых регистров, первый выход блока задания скорости связан с третьими входами сумматоров, а входыпервого элемента И соединены с выходами счетчиков перемещений3 . о 5 Недостатком этого интерполятораявляется то, что использованиепредварительно рассчитанного масштабного коэффициента М усложняетподготовку программ, увеличивает ЭО объем вводимой информации, требует28 3 585 значительного дополнительного оборудования и снижает быстродействие) так как в процессе работы интерполятора вводимая в него информация корректируется в широких пределах и, следовательно, величина М должна определяться, исходя из 5 наихудшего случая.Целью предлагаемого изобретения является упрощение интерполятрра и повышение его быстродействия.Поставленная цель достигается тем, 1 О что в интерполятор введены элемент ИЛИ и по каждой координате второй элемент И и триггер, единичный вход которого подключен ко второму выходу сумматора данной координаты, нулевые входы триггеров подключены к выходу элемента ИЛИ, входы которого подсоединены ко входам вторых регистров и к выходам блоков коррекции и ко вторым входам сумматоров, единичные выходы триггеров подсоединены к одним из входов вторых элементов И соответствующей координаты, другие входы вторых элементов И подключены ко второму выходу блока задания скорости, а выходы - ко вторым входам коммутатора, ко вторым входам счетчиков перемещений и к выходам интерполятора.На чертеже представлена блок-схема интерполятора, Интерполятор содержит 30 блок ввода программы 1, блок задания скорости 2, первый элемент И 3, коммутатор 4, счетчики перемещений 5, блоки коррекции 6, вторые регистры 7 сумматоры 8, первые регистры 9, 35 элемент ИЛИ 10, триггеры 11 и вторые элементы И 12.Рассмотрим работу интерполятора, например, в двух следующих режимах: в режиме линейной интерполяции и в режиме круговой интерполяции.В режиме линейной интерполяции вводимая информация перед началом работы распределяется Следующим образом. Код скорости с выхода блока 1 записывается в блок 2, а величины перемещений АХ, дХАХп заносятся в регистры 7 соответствующих Координат и одноврЕменно, в виде дополнительного кода, в счетчики перемещений 5. В коммутатор 4 поступает, признак линейной интерполяции. По этому признаку коммутатор 4 вырабатывает сигналы, настраивающие блоки 6 на передачу без коррекции ко дов с выходов блоков 6 коррекции на 55 входы регистров 7. При работе в режиме линейной интерполяции импульсы с выхода блока задания скорости 2 поступают на сумматоры 8, осуществляют поразрядное сложение содер жимого регистров 7 и 9, при этом полученная суммазаписывается в регистры 9. Сигналы переноса, возникающие при суммировании двух любых разрядов слагаемых, устанавливают в 1 триггеры 11, а сигналы 1 следую. щих (старших) разрядов приращений через элемент ИЛИ 10 сбрасывают все триггеры 11 в О, Таким образом, в одном цикле суммирования в состоянии 1 будет находиться только тот из триггеров 11, который установлен в 1 переполнением из старшего разряда, причем этот старший разряд определяется большим из приращений Х, Ь Х ЬХ.Такт блока задания скорости 2, следующий за тактом суммирования старшего разряда, поступает на входы всех элементов И 12, открытые единичными выходами триггеров 11, и затем на счетные входы счетчиков 5 и выходы соответствующей координаты интерполятора. При этом, независимо от величины заданных приращений, переполнение, возникающее в старшем разряде любой из координат, будет выделяться и поступать на выход, Так будет продолжаться до тех пор, пока все счетчики 5 не окажутся в нулевом состоянии. Тогда элемент И 3 формирует сигнал окончания отработки кадра, который поступает в блок задания скорости 2 и прерывает выработку тактовых импульсов. В режиме круговой интерполяции вводимая информация распределяется по блокам следующим образом, Информация о координатах начальной точки дуги окружности Х , Х заноситсян 1нв регистры 7 тех координат, которые определяются нужной плоскостью интерполяции. Так, при интерполяции в плоскости ХОХХщ заносится в регистр 7 координаты Х а Хн- в регистр 7 координаты Х . Величины приращений, определяемые как разность координат конеччой и начальной точки дуги, т.екаклх = х -х и ах=1 К 4 К 2. щ хд - х , заносятся в виде допол 2 Ннительного кода в соответствующие счетчики перемещений 5 так, что аХ; заносится в счетчик 5, соответствую-. щий координате Х, аьХ - в счетчик 5, соответствующий Коорди ате ХНапример, при интерполяции в плоскости Х ОХ,ьХ заносится в счетчик 5 координаты Х, адХ - в счетчик 5 координаты Х . В коммутатор 4 поступа" пает с выхода блока 1 признак плоскости и направления интерполяции. При этом коммутатор 4 формирует сигналы, настраивающие один из блоков 6 сложения-вычитания на добавление, а другой - на вычитание 1 к содержимому соответствующего регистра 7 в процессе его рециркуляции, что обеспечивает коррекцию подынтегральной функции.Далее работа осуществляется так же, как при линейной интерполяции, и так же происходит выделение переноса из старшего разряда, как и в режиме линейной интерполяции. При этом схема обеспечивает точное вы65858 О 20 Формула изобретения 35 40 деление переполнения, несмотря нато, что содержимое регистров 7 иих разрядность в процессе отработкидуги окружности непрерывио меняется,Оканчивается круговая интерполяция,когда счетчики 5 окажутся в состоянии О. 5 Таким образом, преимушеством данного интерполятора являются его упрощение, возможность произвольного увеличения числа интегратора в интерполяторе без усложнения схемы, расширение класса обрабатываемых траекторий за счет возможности отработки траекторий, текущие координаты которых во время работы могут изменять разрядность своих значений (например, дуги окружностей, парабол и т.д.), повышение быстродействия за счет автоматического определения старшего значащего разряда всех интеграторов и возможности работать на скорости, соответствующей наибольшей скорости выработки приращений интеграторами. Интерполятор для систем программного управления, содержащий блок ввода программы, первый выход кото-. рого связан с первым входом блока задания скорости, второй вход которого соединен с выходом первого элемента И, коммутатор и по каждой координате счетчик перемещений, первый регистр, сумматор и последовательно соединенные второй регистр ,и блок коррекции, выходы первого регистра и блока коррекции соединены .с первым и вторым входами сумматора данной координаты соответственно, первый выход сумматора связан со входом первого регистра одноименнойкоординаты, второй выход блока ввода программы подключенпервымвходам счетчиков перемещений и коммутатора, выходы которого подсоединены к одним из входов блоков коррекции, третий выход блока вводапрограммы связан со входами вторыхрегистров, первый выход блока заданияскорости связан с третьими входамисумматоров, а входы первого элементаИ соединены с выходами счетчиков перемещений, о т л и ч а ю щ и й с ятем, что, с целью упрощения иповышения быстродействия интерполятора, в него введены элемент ИЛИ и покаждой координате второй элемент И итриггер, единичный вход которого под"ключен ко второму выходу сумматораданной координаты, нулевые входытриггеров подключены к выходу элемента ИЛИ, входы которого подсоединены ко входам вторых регистрови к выходам блоков коррекции и ковторым входам сумматоров, единичные выходы триггеров подсоединенык одним из входов вторых элементовИ соответствующей координаты, другиевходы вторых элементов И подключеныко второму выходу блока задания скорости, а выходы " ко вторым входамкоммутатора, ко вторым входам счетчиков перемещений и к выходам интерполятора,Источники информации, принятые,во внимание при экспертизе1. Авторское свидетельство СССРР 555381, кл. 8 05 В 9/18, 1975.2. Воронов А.А и др. Цифровыеаналоги, для систем автоматическогоуправления, М., АН СССР, 1980,ст. 132-139.3. Дригваль Г.П. Цифровые дифференциальные анализаторы, М., Советское РаДио, 1970, ст.183-215.Тираж И Госу деламЯ5 014 арственно иэобрете Ра скан шкинКорректорПодлисноего комитеий и открнаб с д
СмотретьЗаявка
2456764, 01.03.1977
ПРЕДПРИЯТИЕ ПЯ А-3890
КУЗЬМИН ГЕННАДИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/4103
Метки: интерполятор, программного, систем
Опубликовано: 25.04.1979
Код ссылки
<a href="https://patents.su/4-658528-interpolyator-dlya-sistem-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Интерполятор для систем программного управления</a>
Цифровой регулятор скорости двигателя постоянного тока

Номер патента: 312235
Опубликовано: 01.01.1971
МПК: G05B 11/06, H02P 1/40
Метки: двигателя, постоянного, регулятор, скорости, цифровой
...Величина суммарного числа зависит от выбранного диапазона регулирования, заданной величины скорости двигателя и входных параметров,Цифровой регулятор работает следующим образом,Импульс, поступающий с регистрирующего устройства частотного датчика, задающего начало измеряемого интервала, и сформированной в формирователе 5 переносит задание, записанное в коммутационных схемах переключателей, в счетчик СЧ. Через время задержки, необходимое для установки счетчика, переключается триггер 9. При этом открывается ключ 10 и в счетчик СЧ начинают поступать импульсы генератора 7. Счет заканчивается с поступлением с регистрирующего устройства частотного датчика импульса, задающего конец измеряемого интервала, который формируется в формирователе б....
Цифровая машина для управления процессами электронноголучевой микрообработки

Номер патента: 511594
Опубликовано: 25.04.1976
Авторы: Деркач, Згуровец, Ракитский
МПК: G05B 19/18, G05B 19/4068, G05B 19/418
Метки: микрообработки, процессами, цифровая, электронноголучевой
...10 изменения масштаба рисунка.Блок 3 имеет двусгордиИе связи Обмена управляюшей ицфэрмацией с блоком)раисИгтера 1 пэ шНам 11 заломин(зпп(м у(:трйсВ,м 2 - по иш гам 12 и1Пэс)чил)циз ицОр Лци) в блок) 60) например, проекции наклонной линии или радиуса ояружц ЭСТИ На ОСИ Кэорди)а Г, ШаГ у)1 ьти 1 Ги(ка 1и;1 р. в зависимости эт в)й" дп иу рй, 1 ри Вэс)Ои зВ)д(нии фиГя) лр 1 в.55 Введение в состав мяшицы блока изменения масштаба рисунка позволяет мулытиплицировать с необходимыми масштабными преобразованиями первоначально запрограммированный рисунок, Применяя 66 различные масштабные коэффициенты цэ цят точечный режим постр опия, причемвсе промсжутэчцьге точки цнтерпэлируютсявы числитель цы м бпо ко м 5,Кроме геометрической ицформдции...
Программное устройство управления гидротехническим затвором

Номер патента: 1262453
Опубликовано: 07.10.1986
МПК: G05B 19/43
Метки: гидротехническим, затвором, программное
...датчика на управляющий электрод оптронного тиристора -го приемника, последний открывается, что приводит к сбросу выходных сигналов интеграторов 13,1 и13.2. После прохождения датчикомочередного приемника на входы интеграторов подаются постоянные по величине сигналы и на выходах интеграторов появляются линейно возрастающие сигналы. В момент сброса выходных сигналов интеграторов в преобразователях 19 и 20 скорости фиксируются максимальные величины этих сигналов и производится деление постоянной величины, пропорциональной расстоянию между приемниками на максимальное значение поступившего сигнала, величина которого пропорциональна времени прохождения кромкамизатвора 7 расстояний между приемника-ми 12. 1 1, ,(12,2 1)В результате на...
Устройство для автоматического управления рабочим органом землеройно-транспортной машины

Номер патента: 1320349
Опубликовано: 30.06.1987
Авторы: Корженков, Сасс-Тисовский, Танин-Шахов, Толстопятенко
МПК: E02F 9/20
Метки: землеройно-транспортной, органом, рабочим
...составляющих позволяет полу- цать высокую плавность выемки грунта, практически не ухулпая характеристик этого процесса, так как подавляемые при стабилизаии высокочастотные составляющие воздействуот на поисковую часть системы.В результате того, что в контуре стабилизации есть ограничение действительной скорости по минимуму, при попадании машины в режим с буксованием - )ОЯ, устройство работает ца выглублецие рабочего органа, выводящее машину из этого режима.При включении механизма заглублеция рабочего ор: аца и переволе на автоматическое управление последнего с измерительных блоков тягового усилия 1 и действительной скорости 2 непрерывные сигналы, пропорциоальные свободной силе тяги и действительной скорости лижения машины, цоступдюг нд...
Блок отсчета скорости ультразвуковогоцифрового интерферометра

Номер патента: 509822
Опубликовано: 05.04.1976
Авторы: Волейшис, Сукацкас, Яронис
МПК: G01N 29/00
Метки: блок, интерферометра, отсчета, скорости, ультразвуковогоцифрового
...соотнощения:)йгде- частота ультразвука;цена метки перемещения в единицах длины,Устанавливают емкость счетчика полуволн 1, равную Й, а коэффициент деления делителя 6, равный значащим цифрамдискретности д (т. е,вне считая нулейсправа). На вход счетчика полуволн 1 подают с интерферометра импульсы, соответствующие изменению длины акустическогопути на одну полуволну, На вход электронного ключа 2 с интерферометра подаютметки перемещения. Изменяют акустическую базу интерферометра. В момент прихода первого импульса, соответствующегоакустическому резонансу интерферометрв,сигналом из счетчика полуволн 1 открывается ключ 2, Каждый импульс меткиперемещения, прошедший открытый ключ 2,перебрасывает триггер 3. Выходным импульсом триггера 3...
Предыдущий патент: Устройство для управления автооператорными линиями
Следующий патент: Система числового программного управления
Случайный патент: Способ очистки экстрагента