Программное устройство управления гидротехническим затвором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
(7 1) Горьковский оКрасного Знамени иводного транспорта(56) Авторское свиВ 947831, кл. С 05 У 37дена Трудовогоститут инженеров анов СССР 980. етельс В 19/4 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИЗОБРЕ А ВТОРСКОМУ СВИДЕТЕЛЬСТВ(54) ПРОГРАММНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ГИДРОТЕХНИЧЕСКИМ ЗАТВОРОМ(57) Изобретение относится к оборудованию судоходных шлюзов, а именнок подъемным механизмам подъемноопускных гидротехнических затворов .Цель изобретения - стабилизация скорости движения и повышение точностибесперекосного перемещения гидротехнического затвора. Устройство является усовершенствованием изобретенияпо авт.св, У 94783 1. Усовершенствование заключается во введении в основное устройство блока стабилизаци движения, состоящего из двух преобразователей скорости, узла иэмерени скорости, узла контроля скорости и двух узлов коррекции, у которых выводы соединены с сумматорами, включенными между первыми выходами интеграторов и соответствующими вхрвдами блока синхронизации. На первые входы. узлов коррекций подаются сигна лы, пропорциональные задаваемой скорости затвора, вторые входы соединены с первыми выходами преобразователей скорости, а третьи входы соединены с выходами узла контроля скорости (УКС) . На один из входов УКС подается сигнал, пропорциональный задаваемой скорости затвора, дру" гой вход связан с выходом узла измерения скорости, а входы последнего через преобразователи скорости соединены с вторыми входами интеграторов. 1 ил, 1262453Изобретение относится к оборудованию судоходных шлюзов, а именно ,к подъемным механизмам подъемноопускных гидротехнических затворов, и является усовершенствованием известного устройства, описанного в авт.св. В 94783 1.Целью изобретения является стаби-, лизация скорости движения и повышение точности устройства.На чертеже приведена схема устройства с блоком стабилизации движения. Устройство содержит две автономные силовые установки 1.1 и 1,2, каждая из которых состоит из последовательно соединенных электродвигателя 2. 1 (2.2), насоса 3.1 (3.2), программного гидравлического узла 4.1 (4.2) управления поршневым исполнительным механизмом 5.1 (5.2), к штоку 6.1 (6.2) которого подвешена одна из боковых кромок затвора 7 с направляющими 8 и 9. Блоки 10,1 (10.2) .контроля перемещения затвора включают датчики 11,1 (11.2), расположенные на боковых кромках затвора 7, приемники 12.1 (12.2) положения кромок затвора, жестко связанные с направляющими 8 и 9 затвора., интеграторы 13,1 (13.2), входы которых соединены с выходами приемников 12.11, 12.12, , 12.1 Ь (12.2 1, 12,2 2, 12.2 Ь). Первые выходы интеграторов через сумматоры 14 и 15 подкл 1 очены к блоку 6 синхронизации, соединенному своими выходами с электродвигателями 2.1 и 2.2, а вторые выходы интеграторов подключены к блоку 17 стастабилизации движения, который включает узел 18 измерения скорости, соединенный с вторыми выходами интеграторов 13.1 и 13.2 через преобразователи 19 и 20 скорости, узел 21 контроля скорости, на один из входов которого подается сигнал с канала Ч , пропорциональный задаваемой скорости, а второй, вход связан с выходом узла 18 измерения скорости, узлы 22 и 23 коррекции, у которых выходы соединены с сумматорами 14 и 15, на первые входы подаются сигналы с канала 7 с пропорциональные задаваемой скорости, вторые входы соединены с первыми выходами преобразователей 19 и 20 скорости, а третьи входы соединены5 10 1520 25 30 35 40 45 50 55 с выходами узла 21 контроля скорости,Устройство работает следующимобразом.При движении затвора вверх датчики 11.1 (11,2), расположенные назатворе 7, встречают последовательноодин за другим приемники 12,1 112.1 Ь(12,2 112.2 Ь,), установленные на одинаковом расстоянии одинот другого. В момент попадания светового луча светодиода датчика на управляющий электрод оптронного тиристора -го приемника, последний открывается, что приводит к сбросу выходных сигналов интеграторов 13,1 и13.2. После прохождения датчикомочередного приемника на входы интеграторов подаются постоянные по величине сигналы и на выходах интеграторов появляются линейно возрастающие сигналы. В момент сброса выходных сигналов интеграторов в преобразователях 19 и 20 скорости фиксируются максимальные величины этих сигналов и производится деление постоянной величины, пропорциональной расстоянию между приемниками на максимальное значение поступившего сигнала, величина которого пропорциональна времени прохождения кромкамизатвора 7 расстояний между приемника-ми 12. 1 1, ,(12,2 1)В результате на выходах преобразователей19 и 20 скорости вырабатываются сигналы, пропорциональные линейным скоростям перемещения кромок затвора 7.Выходные сигналы преобразователей19 и 20 поступают на соответствующие входы узла 18 измерения скорости и узлов 22 н 23 коррекции, В узле 18 измерения скорости в резуль -тате суммирования входных сигналоввырабатывается сигнал на выходе,пропорциональный фактической скорости средней точки затвора 7, относительно которой при выравнивании перекоса перемещаются в противоположных направлениях кромки затвора,Этот сигнал поступает в узел контроля скорости, где сравнивается с сигналом, пропорциональным заданнойскорости, поступающим с устройствазадания скорости системы управления приводом затвора (не показано).При равенстве сигналов, пропорциональных фактической и заданной скоростям, на выходах узла 21 контроляскорости выходные сигналы отсутствуют и на входы блока 16 синхронизации поступают сигналы с первых выходов интеграторов 13.1 и 13,2, Это соответствует движению средней точ ки затвора 7 с заданной скоростью и программное устройство осуществляет поддержание бесперекосного движения. При этом, если сброс сигналов на выходах обоих интеграторов 13,1 и 13.2 происходит одновременно, т.езатвор движется беэ перекоса, сигнал рассогласования, получаемый в блоке 16 синхронизации, равен нулю., При возникновении перекоса затвора 15 сброс электрического сигнала с выхода одного из интеграторов 13.1 или 13,2 происходит с задержкой по времени относительно момента сброса сигнала на выходе другого интегратора, относящегося к кромке затвора, расположенного выше. В течение промежутка времени между сбросами сигналов на выходах интеграторов 13, 1 и 13.2 в блоке 16 синхронизации вырабатывается сигнал рассогласования, с помощью которого соответственно изменяется скорость электро" двигателей 2,1 и 2.2, благодаря чему устраняется перекос затвора. 30В случае отклонения действительной скорости перемещения средней точки .затвора 7 от заданной величины узел 21 контроля скорости подает командные сигналы на соответствующие З 5 входы узлов 22 и 23 коррекции скорости, сравнивающих сигналы, один из которых пропорционален заданной, а другой, поступающий с преобраэователей 19 и 20 скорости, пропорционален действительной скорости кромки,определяющих величину и знак отклонения и вырабатывающих сигналы коррекции, подаваемых через соответстчующие суммирующие устройства 14 и15 на входы блока 15 синхронизации,который одновременно с устранениемперекоса производит корректировкулинейной скорости перемещения кромокзатвора 7. Формула изобретенияПрограммное устройство управления гидротехническим затвором по авт.св. В 947831, о т л и ч а ю - щ е е с я тем, что, с целью стабилизации скорости и повышения точности устройства, оно содержит блок стабилизации движения, состоящий иэ двух преобразователей скорости, узла измерения скорости, узла контроля скорости и двух узлов коррекции, у которых выходы соединены с сумматорами, включенными между первыми выходами интеграторов и соответствующими входами блока синхронизации, первые входы узлов коррекции подключены к каналу задания скорости, вторые входы соединены с первыми выходами преобразователей скорости, а третьи входы соединены с выходами узла контроля скорости, один иэ входов которого подключен к каналу задания скорости, а другой вход связан с вьмодом узла измерения скорости, при этом входы последнего через преобразователи скорости соединены с вторыми выходами интеграторов.1262453 Составитель О. Гудковадактор Г. Волкова Техред Л.Олейник Корректор М. Максимишине оцписно г. Ужгород, ул,еское предприят г тная,о оизводс Заказ 5426/45 Ти ВНИИПИ Государств по делам изобре 113035, Москва, Жаж 836 Пнного комитета СССРений и открытийРаушская наб, д. 4/5
СмотретьЗаявка
3857026, 02.01.1985
ГОРЬКОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ИНСТИТУТ ИНЖЕНЕРОВ ВОДНОГО ТРАНСПОРТА
ТЕРЕШКИН ДМИТРИЙ СЕРГЕЕВИЧ, ИВАНОВ ВЛАДИМИР СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 19/43
Метки: гидротехническим, затвором, программное
Опубликовано: 07.10.1986
Код ссылки
<a href="https://patents.su/4-1262453-programmnoe-ustrojjstvo-upravleniya-gidrotekhnicheskim-zatvorom.html" target="_blank" rel="follow" title="База патентов СССР">Программное устройство управления гидротехническим затвором</a>
Устройство для определения скорости выхода металла из клети при прокатке

Номер патента: 925458
Опубликовано: 07.05.1982
Автор: Гребенец
МПК: B21B 38/00
Метки: выхода, клети, металла, прокатке, скорости
...для расчета опережения:При т = )1 формула имеет вид:ср 5 258 я(2 т- - я) 1 я(1 - 0,5 е)2 т(1 - я) 2 трусд где 5 - опережение металла при прокатке;1 - длина дуги захвата.Ввиду громоздкости формулы (1) ее не удается реализовать в полном объеме простыми средствами. Практически предварительную уставкускорости выходных рольгангов целесообразно рассчитывать для режимов прокатки, характеризующихся повышенным опережением 3 - 15%. Для таких режимов можно усреднить значения переменных коэффициентов формулы (1) и представить ее в следующем виде:(1 - С,/й,)2-,(:-).(Ь,) (2)3где а(а)=С,1, (Ь,) =(1 - С,РЙ,)". -нелинейные зависимости;Сь С - коэффициенты, зависящие отпринятых параметров усреднен и,я.Коэффициенты С, и С 2 выбираются таким образом,...
Интегратор с весовым усреднением сигналов

Номер патента: 1583859
Опубликовано: 07.08.1990
МПК: G01R 19/04, G01V 3/10
Метки: весовым, интегратор, сигналов, усреднением
...и 33. Из этих диаг" рами следует, что в исходном состоянии открыты первый, второй и пятый каналы коммутатора 3, так как на его соответствующих входах управления присутствует потенциал логического И 01По приходу положительных информационного и синхронизирующего импульсов закрывается второй и пятый, а открываются четвертый и шестой каналы коммутатора 3, В итоге конденсатор 6 отключается на времяизч цепи отрицательной обратной связи усилителя 4, а вместо него включается конденсатор 5. Последний на протяжении времени.заряжаетсячерез резистор 2 и открытые первыйи.четвертый каналы коммутатора 3 отвходного напряжения А(й) током где К - сопротивление резистора 2,По окончании импульса 8 конденсатор 5 отключается от усилителя4, вместо него...
Устройство для измерения скорости грузопотока в загрузочных узлах конвейеров

Номер патента: 487817
Опубликовано: 15.10.1975
Авторы: Гуленко, Полунин, Фролов
МПК: B65G 43/00
Метки: грузопотока, загрузочных, конвейеров, скорости, узлах
...фиг. 1 изображено описыройство, общий вид; на фиг. 2стрелке А на фиг. 1; на фиг, 3 - ррезе. Обечайка 10 ролика футеруется эластичным материалом 11 и опирается на подшипники 12.На оси 7 установлен подвижный элемент ввиде перегородки 13 с отверстиями, которая жестко соединена с обечайкой 10 ролика. По обе стороны от перегородки 13 на оси 7 жестко закреплены источник света 14 и фотоэлемент 15. Отверстия в перегородке расположе пы на уровне фотоэлемента.Торцы ролика закрыты заглушками 16,Рычаги 6 в средней части снабжены регулировочными болтами 17, которыми регулируется относительное положение ролика 8.Устройство работает следующим образом.Грузопоток, выходящий из загрузочногоустройства, взаимодействует с роликом и приводит во вращение...
Устройство для контроля аналого-цифрового преобразователя сигналов изображения
Номер патента: 1016851
Опубликовано: 07.05.1983
Авторы: Королев, Назаренко, Певзнер
МПК: H04N 7/02
Метки: аналого-цифрового, изображения, преобразователя, сигналов
...числа иэображения содержит генератор 1 иссбоЕв - с синхровыходом генератора О нытательных сигналоа, поверяемый анаиспытательных сигналов через форми- лого-циФровой преобразователь 2, рователь сигнала конца .строчных .блоки 3.1,3.23 и определениячиссинхроимпульсов, а выходы, блоков - . . ла сбоев, блоки 4.1, 4.2. ,4 и па.определеиия чйсла сбоев в . с инфор- ; мяти, дешифраторы 5.1, 5.25 и, мационными входами соответствующих 5 элементы И б.1, б.2би, регистр блоков памяти, счетные: входы кото- .7 сдвига, генераторы 8.1, 8.2, рых соединены с сиихровЫходом гене- : 8 п калиброванных импульсов, селек.- ратора испытательных сигналов через , тор 9 положительных импульсов-, сеформирователь сигнала начала строч- лектор 10 отрицательных...
Стробоскопический преобразователь электрических сигналов последовательности импульсов
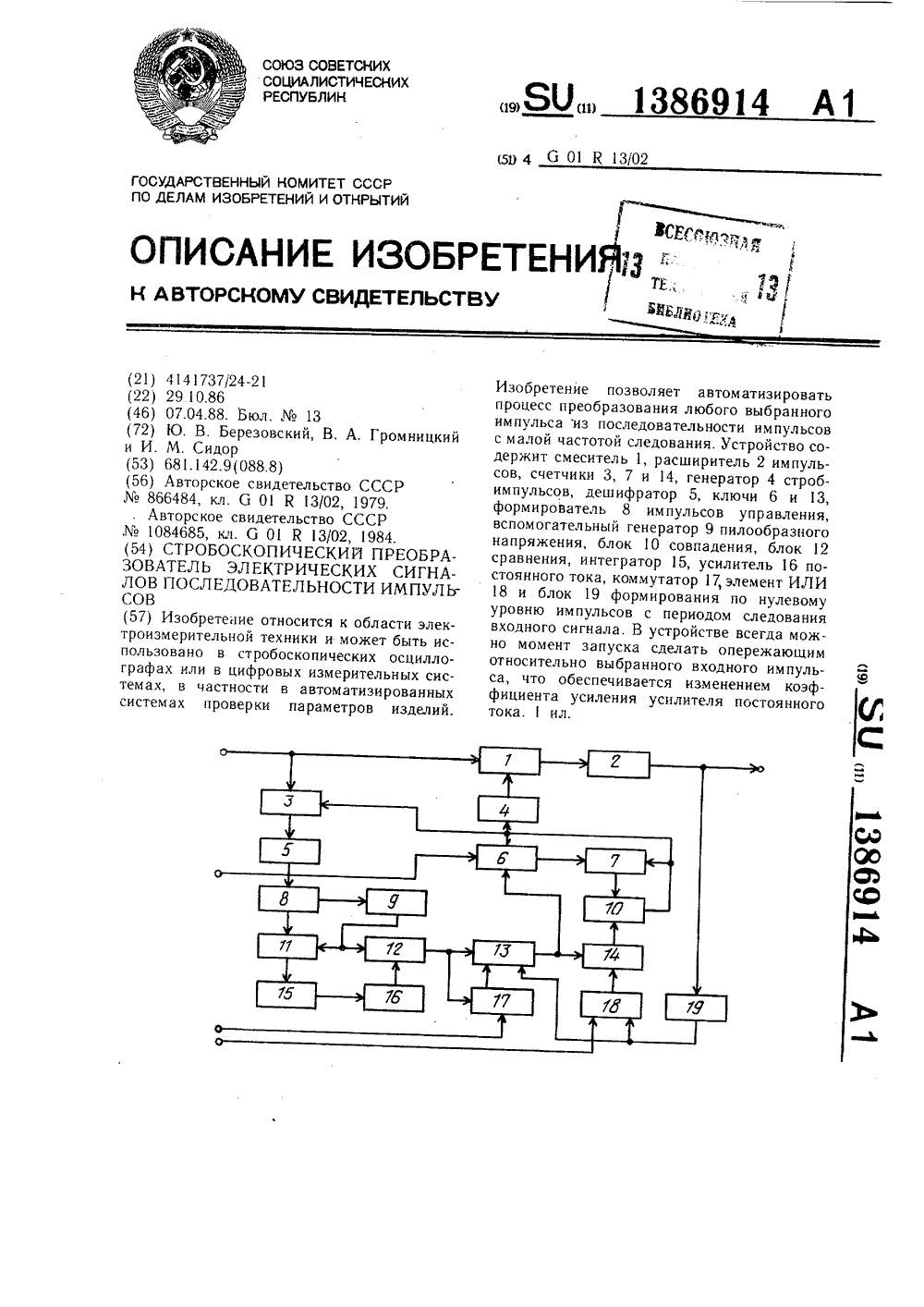
Номер патента: 1386914
Опубликовано: 07.04.1988
Авторы: Березовский, Громницкий, Сидор
МПК: G01R 13/02
Метки: импульсов, последовательности, сигналов, стробоскопический, электрических
...импульсов. Этот формирователь вырабатывает импульс, равный по длительности всей последовательности импульсов (пачки импульсов) для запуска вспомогательного генератора 9 пилообразного напряжения, и импульс, равный по длительности времени 7 от начала последовательности до приходаимпульса, порядковый номер которого записан в регистре формирователя. Этот импульс управляет работой ключа 11, на аналоговый вход которого подается пилообразное напря-жение от вспомогательного генератора 9.С выхода ключа 11 это пилообразное напряжение заряжает конденсатор интегратора 15 до напряжения, величина которого зависит от времени открытого состояния ключа 11, т. е. от выбора порядкового номера импуль-са входной последовательности. Это напряжение...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство для определения передаточной функции динамического звена
Случайный патент: Шестизвенный шарнирно-рычажный механизм с остановкой ведомого звена