Система управления с эталонной моделью
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
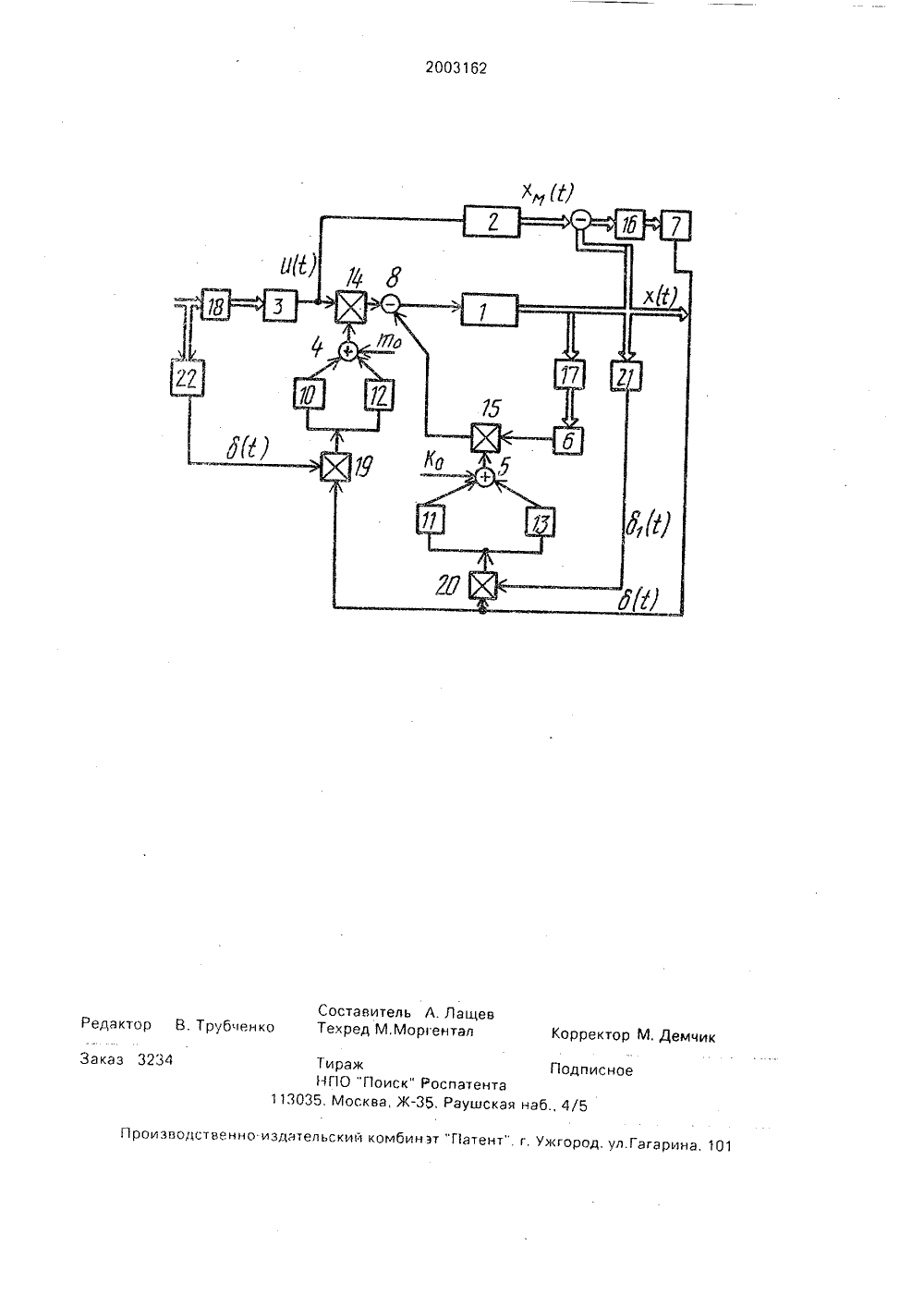
(76) Пащев Анатолий Яковлевич; Боровков Анатолий Григорьевич; Мисюк Иван Васильевич(57) Изобретение относится к самонастраиваюКомитет Российской Федерации по патентам и товарным знакам(51) 5 605 В 13/00 щимся системам управления, качество переходных процессов в которых задается дифференциальным уравнением эталонной модели. Достижение указанного технического эффекта достигается за счет использования только одного умножитепя в каждом контуре адаптации, что позволяет исключить взаимовлияние каналов адаптации. 1 ил.Изобретение относится к самонастраивающимся системам управления. качество пеоеходных процессов в которых задается дифференциальным уравнением эталонной модели,Рассмотрим нестационарную системууправления х(п) + Х а(т) + 3 с(с)сДхф.= 3 сус(т) о,и+1 25(2) Для обеспечения устойчивости системынеобходимо положить и+1 20 Рог+2 Лгуу0 1=1(3) 40С этой целью примем у 1 = у(т), а уп+1(т)=(5)55 Ввиду того, что неравенство и равенство в (5) должны выполняться одновременно окончательно алгоритмы изменения параметров имеют вид где х(г), о - выходной и входной сигналы системы; 15а;(г), 1(1) - нестационарные параметры объекга управления;Ь(г), с(г) - переменные параметры регулятора, которые ищутся на основе второго метода Ляпунова, 20С учетом уравнения системы и эталонной модели в (1) записывается выражение для производной функции Ляпунова у(1) = -ИМ+ Х Ф)дф 3с(с) = - рг(ОЮ(т)+ Х ФФ 1(г)С 1 Цгде значения о(т), д(т) и дф) имеют видО(т) = рп 1 Е+ Ри 2 Р+ + Рпп Е" 1),) = х + х(1) ++ х(" 1дг(т), г. о(1) (и)На чертеже представлена функциональная схема системы.Приняты следующие обозначения: обьект 1 управления, эталонная модель 2 объекта управления, сумматоры 3-7, блоки 8 и 9 сравнения, усилители 10 и 11, интеграторы 12 и 13, первый 14 и второй 15 блоки умножения, блоки 16-18 усилителей, третий 19 и четвертый 20 блоки умножения, сумматоры 21 и 22,Система работает следующим образом,Входной сигнал ф) усиливается покомпонентно в блоке усилителей 18, усиленные составляющие его (сигнал управления и производные до пгпорядка) поступают на вход сумматора 3. Сигнал с выхода сумматора 3 подается на входы эталонной модели 2 и один из входов блока 14 умножителей, на второй вход которого поступает сигнал настройки с выхода сумматора 4, С выхода блока 14 умножителей сигнал поступает на суммирующий вход блока 8 сравнения, с выхода которого поступает сигнал управления цг(т) на вход объекта 1 управления, В блоке 9 сравнения векторные сигналы с выходов эталонной модели 2 и обьекта 1 управления соответственно х(т) и х(г) сравниваются, масштабируются в блоке 16 усилителей и полученные сигналы суммируются в сумматоре 7, сигнал о с выхода которого поступает на входы настройки блоков 20 и 19 умножителей, на вторые входы которых поступают соответственно сигналы дф) и ф), Сигнал д получается после суммирования составляющих вектора управления ц(т) в сумматоре 22, Сигнал с выхода блока 19 умножителей после пропорционально-интегрального преобразования в усилителе 10 и интеграторе 12 суммируется с сигна2003162 лом начальной установки И в сумматоре 4 и поступает на вход блока 14 умножителей. На вычитающий вход блока 8 сравнения поступает сигнал с выхода блока 15 умножителей, Сигнал с выхода. объекта управления 1 5 через блок 17 усилителей поступает на вход сумматора 6, а затем на вход блока 15 умножителей, Кроме того, составляющие с выхода объекта управления 1 суммируются в сумматоре 21, полученный сигнал д(т) посту пает на вход блока 20 умножителей, который перемножается с сигналом сф), преобразуется в усилителе 11 и интеграторе 13 и суммируется с сигналом К в сумматоре 5, на выходе которого получается сигнал 15 телей подключены к входам второго 20 сумматора, соединенного выходом с выходом первого блока умножения, подключенного вторым входом к выходу третьего сумматора, выходы пеового блока усилителей соединены с входами пятого суммато ра, подключенного выходом к первомувходу второго блока. умножения, второй вход которого подключен к выходу четвертого сумматора, выходь второго блока 30сравнения через третий блок усилителей подключены к входам первого сумматора, выходы шестого и седьмого сумматоров подключены к вторым входам соответственно третьего и четвертого блоков умножения, выходы которых соответствейно через первый и второй усилители соединены с первыми входами третьего и четвертого сумматоров, подключенных вторыми входами к выходам соответственно перво го и второго интеграторов, выходы системы соединены с входами седьмого сумматора. Формула изобретен ия СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННОЙ МОДЕЛЬЮ, содержащая первый блок умножения, подключенный первым входом к входу эталонной модели, а выходом к первому входу первого блока сравнения, второй вход которого соединен с выходом второго блока умножения, а выход через объект управления соединен с выходом системы, входом первого блока усилителей и первой группой входов второго блока сравнения, подключенного второй группой входов к выходам эталонной модели, выход первого сумматора соединен с первыми входами третьего и четвертого блоков умножения, подключенных выходами к входам соответственно первого и второго интеграторов, отличающаяся тем, что в нее введены два усилителя, второй и третий блоки усилителей и с второго по седьмой сумматоры, информационные входы системы соединены с входами шестого сумматора и через второй блок усилинастройки - он поступает на второй вход блока 15 умножителей.Таким образом, при непрерывном изменении параметров объекта 1 управления составляющих матриц А(т) и В(1) - параметры блоков 14 и 15 умножителей меняются так, чтобы х(т) -+ х(1).Использование только одного блока умножения в каждом контуре адаптации позволяет упростить систему и повысить ее быстродействие, так как исключается взаимовлияние каналов адаптации,2003162 Х Тираж Подписное Н П О "Го иск" Роспатента113035. Москва, Ж, Раущская наб., 4/5 Заказ 3234 Производственно издательский комбинат "Патент, г, Ужгород, ул.Гагарина, 101 Составитель Л, Лащев Редактор В. Трубченко Техред М,Моргентал Корректор М, Демчик
СмотретьЗаявка
04866837, 21.09.1990
Лащев Анатолий Яковлевич, Боровков Анатолий Григорьевич, Мисюк Иван Васильевич
МПК / Метки
МПК: G05B 13/00
Опубликовано: 15.11.1993
Код ссылки
<a href="https://patents.su/4-2003162-sistema-upravleniya-s-ehtalonnojj-modelyu.html" target="_blank" rel="follow" title="База патентов СССР">Система управления с эталонной моделью</a>
Матричный сумматор-умножитель

Номер патента: 767759
Опубликовано: 30.09.1980
Авторы: Брюхович, Гриценко, Карцев
МПК: G06F 7/50
Метки: матричный, сумматор-умножитель
...блока 6 и5 7677блока 7 связаны с выходами блока 4,входы блока 8 - с выходами блока 6, первый вход блока 9 - с выходом блока 7,а управляющий вход блока 9 - со входом17 сумматора-умножителя, Второй вход 5блока 9 соединен с выходом блока 8,первый вход блока 10 - с выходом блока 7, второй вход блока 10 - с выходом блока 8, а управляюший вход блока10 - со вкодом 17. Вкод блока 11 подключен к выходам блока 8, а управляющий вход - к выходу блока 1. Выходы12, 13, 14 блоков являются выходамиустройства,Блоки 4 и 5 (фиг. 2) представляют. 15собой группы из 15. двуквходовых элементов И, где- основание используемойсистемы счисления, и имеютвертикальных входных шин с номерами О, 1,р -1 и одну горизонтальную входную шину. Блок 4 имеет э выходных...
Сумматор-умножитель по модулю три

Номер патента: 1441395
Опубликовано: 30.11.1988
Авторы: Глазин, Журавлев, Каревский, Краснобаев, Панков, Фоменко, Чигасов
МПК: G06F 7/72
Метки: модулю, сумматор-умножитель, три
...по модулю три, содержащий два элемента ИЛИ-НЕ, два элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, два элемента ИЛИ и пятнадцать элементов И, причем вход старшего разряда первого операнда сумматора-умножителя соединен с первыми входами первого элемента И, первого элемента ИЛИ-. НЕ и первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, вход младшего разряда второго операнда сумматора-умножителя соединен с. первыми входами второго элемента И, второго элемента ИЛИ-НЕ и второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, выходы элементов И с третьего по девятый соединены соответственно с первым и вторым входами первого элемента ИЛИ, с первым и вторым входами второго элемента ИЛИ, с третьим входом первого элемента ИЛИ, с третьим и четвертым входами второго элемента ИЛИ,...
Ассоциативное запоминающее устройство

Номер патента: 649038
Опубликовано: 25.02.1979
МПК: G11C 15/00
Метки: ассоциативное, запоминающее
...адреса первой ячейки областипамяти накопителя 6, выделенной дляинформации, соответствующей 3-муэталону; в разрядах с (Ь + 1) по (Ь + в)-ый - число занятых ячеек вэтой области.В режиме приема информации код поступает на входной регистр 1.Содержательная часть входной информации поступает в накопитель 6Стар ший разряд регистра 1 устанавливает в блоке управления 14 режим прием.Код признака с регистра 1 поступает на вход накопителя 21, в котором одновременно во всех линейках производится сравнение принятого кода призна 45 ка с эталонами - содержимым регистров, образованных триггерами 45 ячеек памяти 36.Сравнение кодов признака и эталонов происходит следующим образом. 5 ОПроизводится последовательное поразрядное сравнение этих кодов,...
Сумматор-умножитель

Номер патента: 1173409
Опубликовано: 15.08.1985
Авторы: Евстигнеев, Кошарновский, Маркин, Новожилов
МПК: G06F 7/49
Метки: сумматор-умножитель
...и 17,элементы ИЛИ 18,19, 20 и 21, входы 22 и 23,первого и второго операндов, входы 24, 25 и 26 слежения,вычитания и умножения, выходы 27,28 и 29 младшего разряда, старшего разряда результата и переполнениясоответственно. ЭОВ основу работы сумматора-умножителя положено следующее.Пусть исходные числа Аи В представлены по основаниям рабочеголдиапазона СОК о = Д Р;,Кроме того,пусть среди оснований рабочего диапазона нет четных оснований.Произведение максимальных чиселиз данного диапазона требует квадрадинены соответственно с первым ивторым входами первого элемента ИС"КЛЮЧЙОЩЕЕ ИЛИ, выход которого и выход четвертого элемента ИЛИ соединены соответственно с первым и вторымвходами второго элемента ИСКЛЮЧАЮЩЕЕИЛИ, выход которого является выходом...
Сумматор-умножитель по модулю три

Номер патента: 1667054
Опубликовано: 30.07.1991
Автор: Орлов
Метки: модулю, сумматор-умножитель, три
...элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 18(19) формируется значение старшего (младшего) разряда суммыпо модулю три входных операндов.Одновремен ное наличие сигналов уровня "1" на выходах элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 4 (7) и И 14 формирует значащийстарший (младший) разряд модульного и роизведения на выходе элемента И 20 (21). Витоге на выходах элементов ИЛИ 22, 23 формируется результат заданной модульнойоперации,Формула изобретенияСумматор - умножитель по модулю три,содержащий первый и второй элементы ИС 5 10 15 20 25 30 35 40 45 50 55 КЛЮЧАЮЩЕЕ ИЛИ, первый и второй элементы ИЛИ и семь элементов И, причем входы старших разрядов первого и второго операндов сумматора - умножителя соединены с соответствующими входами первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ,...
Предыдущий патент: Адаптивная система управления нестационарным нелинейным объектом
Следующий патент: Система управления нестационарным нелинейным объектом с эталонной моделью
Случайный патент: Устройство для заряда аккумуляторной батареи асимметричным током