Гидроинерционный трансформатор вращающего момента
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1618964
Автор: Данильченко




Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХ 1 СПУБЛИК 6 Н 33/14, 47/00 М 3 ь 1:,Я 3;Ц БЛг 1 О 1,:.,ЕНИЯ ВТОРСК ое- коГОСУДАРСТВЕННЫЙ КОМИТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТПРИ ГКНТ СССР ОПИСАНИЕ ИЗО СВИДЕТЕЛЬСТВ(54) ГИДРОИНЕРЦИОННЫЙ ТРАНСМАТОР ВРАЩАЮЩЕГО МОМЕНТА(57) Изобретение относится к машиноснию. Цель изобретения - повышение 2номичности путем более плавного автоматического регулирования дебалансов сателлитов в зависимости от частоты врашения и нагрузки на выходном валу. При работе гидротрансформатора жидкие грузы располагаются на лопастных колесах 13 и 14, образуя неуравновешенные массы сателлитов 6 и 8, дисбалансы которых автоматически регулируются за счет перетекания грузов по каналам 17, 19 и 18, а месторасположение и проходное сечение последних обеспечивает плавность выходной характеристики гидротрансформатора. 3 ил.Изобретение относится к машиностроению и является усовершенствованием изобретения по авт. св.1506207,Целью изобретения является повышениеэкономичности трансформатора путем болееплавного автоматического регулированиядебалансов сателлитов в зависимости от частоты вращения и нагрузки на выходном валу.На фиг. 1 изображен инерционный трансформатор; на фиг. 2 и 3 - сечение А - Ана фиг. 1 и расположение грузов в гидрокамерах на различных режимах работытрансформатора.Инерционный трансформатор содержиткорпус 1, входной 2 и выходной 3 валы,два планетарных механизма с общим водилом 4, соединенным с входным валом, первый из которых включает соединенное с выходным валом центральное колесо 5 и сателлит 6, а второй включает связанное с корпусом центральное колесо 7 и сателлиты 8,и закрепленные на водиле спаренные гидрокамеры 9 и 10.Сателлиты 6 и 8 разных планетарныхмеханизмов расположены парами на параллельных осях 11 и 12 водила.В гидрокамере 9 размещено лопастноеколесо 13, соединенное с сателлитом 6, ав гидрокамере 10 - лопастное колесо 14,соединенное с сателлитом 8. Каждая из спаренных гидрокамер имеет входную 15 и выходную 16 полости, соединенные каналами17 - 19, обеспечивающими перемещение жидких грузов 20 нз гидрокамеры 10 в гидрокамеру 9 через канал 17 при проходе грузами верхнего положения и через каналы8и 19 из гидрокамеры 9 в гидрокамеру 1 О припроходе грузами нижнего положения.При этом каналы 18, соединяющие нижние полости спаренных гидрокамер с верхними полостями для воздухообмена, выполнены кольцевыми в лопастных колесах 14 са-.теллитов 8, взаимодействующих с заторможенным центральным колесом 7.Трансформатор работает следующим образом.При вращении входного вала 2 с водилом 4 и наличии момента сопротивленияна выходном валу 3 сателлиты 6 и 8 обкатывают соответственно центральные колеса5 и 7 и приводят в движение лопастные колеса 13 и 14, Лопастные колеса 13перемещают груз 20 в гидрокамерах 9 изверхнего в нижнее положение, ближе кцентру трансформатора, а лопастные колеса 14 в гидрокамерах 10 - из нижнегов верхнее положение. При проходе грузамиверхних и нижних положений они под действием центробежных сил перетекают из одной камеры в другую через каналы 17 и 19.При этом центробежными силами инерциигрузов 20, перемещающихся на. лопастныхколесах 13, на центральном колесе 5 создается положительный импульс момента, вращающий выходной вал, а силами инерциигрузов, перемещающихся на лопастных колесах 14, на центральном колесе 7 создается отрицательный импульс момента, замыкаемый на корпус.Регулирование дебалансов сателлитов и изменение вращающего момента выходного вала в нужном направлении в зависимости от его частоты вращения при равномерном вращении входного вала осуществляется следующим образом.При работе трансформатора в стоповом режиме в связи с большой относительной скоростью вращения сателлитов 6 и лопастных колес 13 на грузы 20, проходящих нижнее положение, действуют значительные центробежные силы в направлении центра трансформатора, обеспечивающие полное перетекание грузов из гидрокамер 9 в гидро- камеры 10 через каналы 19. Вследствие этого в стоповом режиме грузы распологаются в гидрокамерах 9 и 10 с одной стороны их периферии (фиг, 2) и создают наибольшее значение дебалансов сателлитов 6 и 8 и соответственно, обеспечивают наибольшйе величины вращающего момента на выходном валу 3 и отрицательного момента на корпусе 1.По мере повышения частоты вращения вала 3 и снижения на нем момента сопротивления относительная скорость вращения сателлитов и лопастных колес 13 уменьшается, вначале снижая величину центробежных сил грузов, проходящих нижнее положение, а затем меняя послойно их знак относител ьно центра трансформатора. Вследствие этого количество грузов 20, перетекающих из гидрокамер 9 в гидрокамеры 10 через каналы 19, постепенно уменьшается, и часть грузов продолжает движение на лопастях колес 13 на противоположные заполненным стороны гидрокамер 9, уменьшая дебалансы сателлитов 6 и 8 и, соответственно, снижая вращающий момент на выходном валу и действие отрицательного момента на корпусе,Необходимая скорость регулирования дебалансов сателлитов на переходных режимах может быть обеспечена путем выбора соответствующих радиальных размеров цент 10 15 20 25 30 35 40 ральных колес, сателлитов и лопастных колес в зависимости от заданной частоты вращения входного вала,С переходом трансформатора в режимы, близкие к режиму муфты, при которых действующие центробежные силы на грузах 20,50 55 проходящих нижнее положение, направленыот центра трансформатора, перетекание грузов из гидрокамер 9 в гидрокамеры 10 осуществляется в небольших количествах через край каналов 19 в канал 18 и далее в лопасти колес 14, вследствие чего грузы располагаются на лопастях колес 13 по всей периферии гидрокамер 9, образуя на сателлитах 6 наименьшие дебалансы, необходимые для режима муфты (фиг. 3).При переходе трансформатора в режим муфты грузы на лопастных колесах 14 в гидрокамерах 10 отсутствуют, поэтому в этом режиме сателлиты 8 уравновешиваются и взаимодействуют с неподвижным центральным колесом 7 вхолостую.И, наоборот, в период перехода трансформатора из режима муфты в режим трансформации момента из-за уменьшения частоты вращения выходного вала 3 и центрального колеса 5 относительная скорость сателлитов и лопастных колес 13 повы- шается, и циркуляция грузов между гидро- камерами 9 и 10 возобновляется, увеличивая дебалансы сателлитов 6 и 8 и, соответственно, усиливая вращающий момент на выходном валу.Такое выполнение трансформатора за счет автоматического регулирования дебалансов сателлитов позволяет эксплуатировать его с постоянной наиболее экономичной частотой вращения входного вала.Формула изобретенияГидроинерционный трансформатор вращающего момента по авт. св,1506207, от линающийся тем, что, с целью повышения его экономичности, в лопастных колесах сателлитов, предназначенных для взаимодействия с центральным колесом, связанным с корпусом, выполнен кольцевой канал.1618964 А-А пархов Составитель В.Техред А. КравчукТираж 378ого комитета по изобретенияМосква, Ж - 35, Раушсктельский комбинат Патент Редактор Н. РогулиЗаказ 33ИИПИ Государствен113035Производственно.изда Корректор Л. БескидПодписноем и открытиям при ГКНТ СССя наб д. 4/5г. Ужгород, ул. Гагарина, 101
СмотретьЗаявка
4399388, 28.03.1988
И. М. Данильченко
ДАНИЛЬЧЕНКО ИВАН МИХАЙЛОВИЧ
МПК / Метки
МПК: F16H 33/14, F16H 47/00
Метки: вращающего, гидроинерционный, момента, трансформатор
Опубликовано: 07.01.1991
Код ссылки
<a href="https://patents.su/4-1618964-gidroinercionnyjj-transformator-vrashhayushhego-momenta.html" target="_blank" rel="follow" title="База патентов СССР">Гидроинерционный трансформатор вращающего момента</a>
Задатчик скорости вращения колеса транспортного средства

Номер патента: 658018
Опубликовано: 25.04.1979
МПК: B60T 8/02
Метки: вращения, задатчик, колеса, скорости, средства, транспортного
...остановки колеса - его замедление цо имеет вид ускоренно падающейкривой. Причем, наиболее резкое изменение крутизны временного процесса по замедлению совпадает с,максимумом кривой ИПользуясь разложением типовогопроцесса по замедлению в степеннойряд, можно показать, что событиеоптимального сцепления колеса с дорогой (максимум И) совпадает и ссобытием наиболее резкого изменениякрутизны процесса по скорости колеса Ь . При этом временной процесспо скорости колеса в,являясь кривой более. высокого порядка по отнощению к процессу по ускорению Й,оказывается более крутой функциейвремени.Следовательно, анализ поведенияпроцесса по скорости в окрестностивыбранной характерной точки более 5 0 15 25 ЗО 40 50 55 40 65 информативен, чем анализ...
Инерционный трансформатор вращающего момента
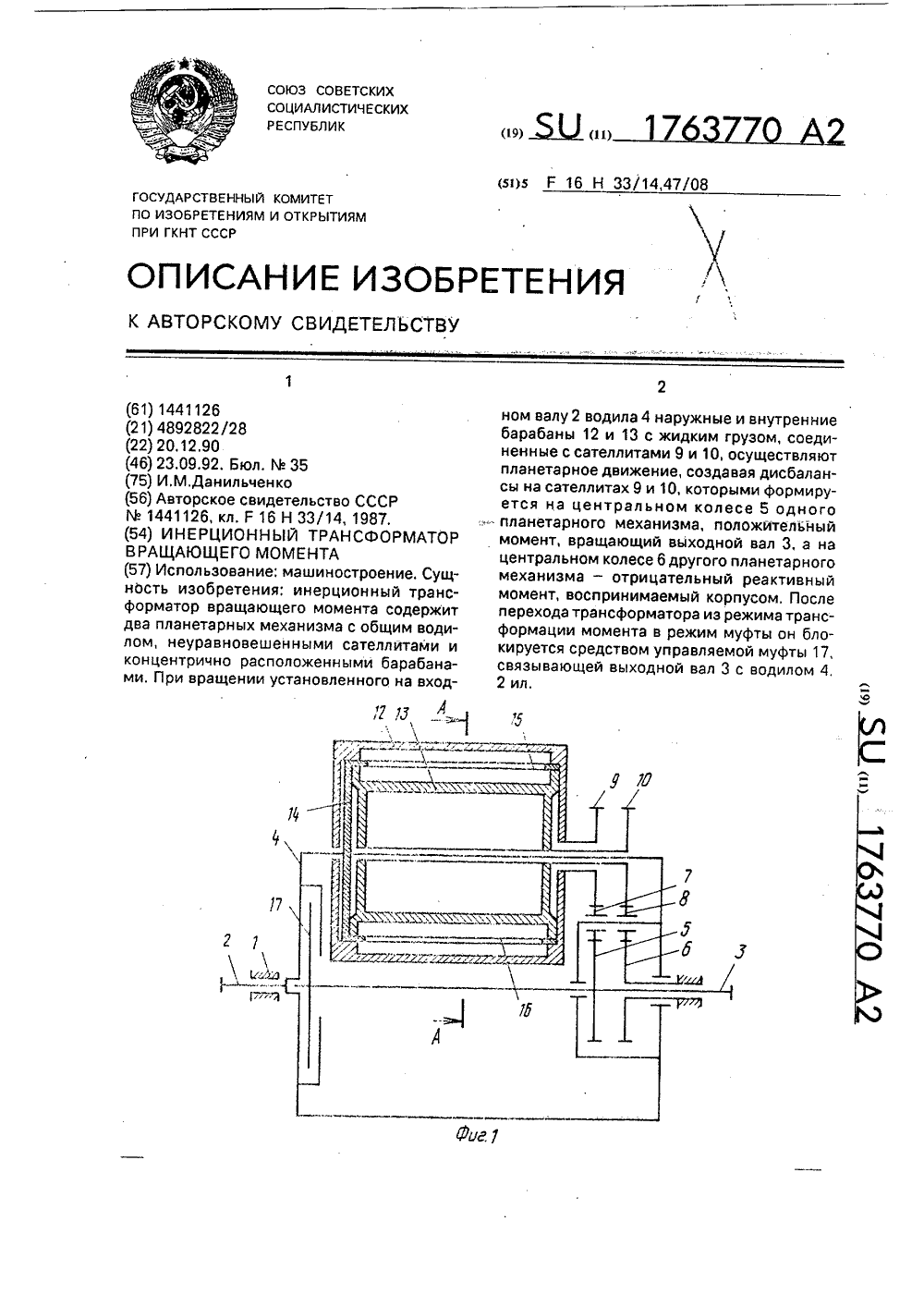
Номер патента: 1763770
Опубликовано: 23.09.1992
Автор: Данильченко
МПК: F16H 33/14, F16H 47/08
Метки: вращающего, инерционный, момента, трансформатор
...перемещаться по окружности лопастями наружных барабанов 12 к центру трансформатора, а лопастями внутренних барабанов 13 - к его периферии, каждый раз перетекая под действием центробежных сил через окна 15 и 16 гильз 14 из лопастей одних барабанов в лопасти других при проходе ими верхних и нижних положений, При этом грузы, находящиеся на лопастях наружных барабанов 12, создают дисбалансы неуравновешенных сателлитов 9, которыми формируется на центральном колесе 5 положительный момент, вращающий выходной вал 3, а на водиле 4 - момент сопротивления, а грузы, находящиеся на лопастях внутренних барабанов 13, создаютдисбалансы неуравновешенных сателлитов 10, которыми формируется на центральном колесе 6 отрицательный реактивный момент,...
Гидроинерционный трансформатор

Номер патента: 1585588
Опубликовано: 15.08.1990
Автор: Данильченко
МПК: F16H 33/14, F16H 47/00
Метки: гидроинерционный, трансформатор
...верхних и нижних положений.При этом грузы, находяшиеся на лопастях наружных барабанов 12 и 17, формируют на центральном колесе 5 и выходном валу 3 положительный вращающий момент, а на водиле 4 - момент сопротивления, а грузы, находящиеся на лопастях внутренних барабанов 13 и 18, формируют на центральном колесе 6 и корпусе 1 отрицательный реактивный врашающий момент, а на водиле 4 - положительный,Автоматическое регулирование вращающего момента на выходном валу 3 в зависимости от частоты его врашения осушествляется следующим образом.При работе трансформатора (фиг. 1 и 2) в стоповом режиме (при неподвижных выходном. вале 3 и центральном колесе 5) абсолютная угловая скорость вращения сателлитов 9 и барабанов 12 либо незначительна, либо...
Центробежно-аэродинамический регулятор скорости вращения ветрового колеса с поворотно-парусными крыльями

Номер патента: 103625
Опубликовано: 01.01.1956
Автор: Вашкевич
МПК: F03D 7/04
Метки: ветрового, вращения, колеса, крыльями, поворотно-парусными, регулятор, скорости, центробежно-аэродинамический
...16). й лруг(и; ( тр(ном 1, ЗйГЦ(еплснным нй нроФи,шр(аиной уапгк( 110). спаренной у;и)гкси 111). нд к- горой з(крепР.( к,(шц Грос 114), иодРржпваощег(1 узи нйвитог( и;( барабан 113). рггу,иц)у)ощий положение улиток.Нрош.)ь ),иТок 10) и ,11). бакр(1( - ,(нных н (,ьцей Оги. поворотной в н(- полникных (;порах. подобран тдк, чтооы закон измснсни 51 мом(тй от реГулиру 10- щего груз;( 1 ) н кры;и 11) для рдзлич- Н Ы.( УГ;1(;" Р 1 О У("(1 д В К И С 0 ОТВРТ СТВОР(Л Опрг.сЛСННОЮ Кдрднтгру ИЗМ(НСН 1 я гк)рости врй;цнпя вот)коРса ири из- )(Н(нич гкорсти встр.,1 у 5) сохранения рдсчсгнык оборотов встро)и го колес;ь при поминльной нагрузя и ири лн(оой скорости ветра примен н ц(птроб.жный регулятор с муФ- гой 14), установленный на главном валу 4)....
Осевая газовая турбина с противоположным вращением колес

Номер патента: 30280
Опубликовано: 31.05.1933
Автор: Щеглов
МПК: F01D 1/24
Метки: вращением, газовая, колес, осевая, противоположным, турбина
...8 и проходящем через неподвижный диск 9, соединенный с кожухом 7 0, жестко закреплен ряд колес 7 с помещенными, между ними, свободно сидящими колесами 3.которые соединены по несколько штук посредством наружных колец 7. Последние" снабжены зубчатыми венцами 4, входящими с сцепление с шестернями 5, жестко укрепленными на добавочном валу б, установленном в подшипниках 7 7. Вал б приводи; в действиенасосы 72, создающие разрежение в каг мерах 73, непосредственно соединенных с кожухом турбины, с целью повышения скорости движения подаваемого в турбину пара.Из паропровода 76 пар подводится по трубам 7 7 в турбину и выходит через направляющие сопла днищ 74 в камеры 7 3. Проходя через турбину, пар воздействуетколеса 7 и З в противоположное...
Предыдущий патент: Устройство для аккумулирования и последующей передачи механической энергии
Следующий патент: Упругое зубчатое колесо
Случайный патент: Электропривод