Способ определения положения ротора шагового двигателя
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1594672
Авторы: Ивоботенко, Кожин, Ландау, Прытков

Текст
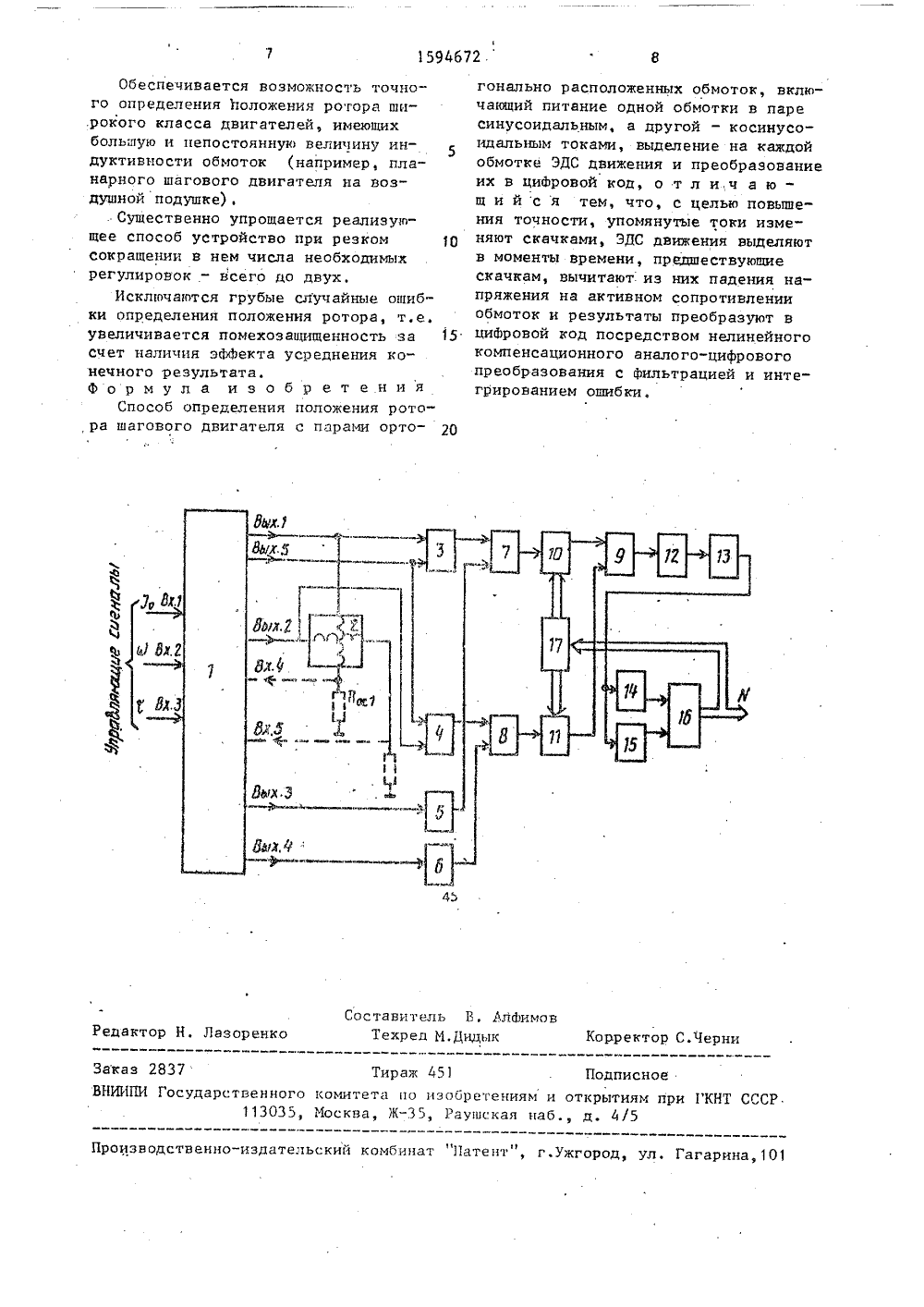
дится методом компенсации. Для этого формируются напряжения, равные по величине и противоположные по знаку указанным составляющим. Если член 1 к(г) К, компенсируется достаточно5 точно. так как значение КФ само по себе мало и мало изменяется, то точд 1 к И) ,ная компенсация чпена Е ккрайкйт . не затруднительна из-за большой величины индуктивности обмотки двигателя и ее сильной зависимости от воздушного зазора между ротором и статором двигатЕля, а также от уровня и часто ты в обмотке.В данном способе синусно-косинусные токи в обмотках двигателя 1делают ступенчато-изменяющимися. Тогда член Ь в в - в момент скачкасПкпринимает некоторое максимальное значение, а затем экспоненциально уменьшается до нуля, максимально приближаясь к нему перед очередным скач ком тока. Поэтому напряжения на обмотках двигателя измеряют в моменты перед скачком тока и запоминают их до следуюшего аналогичного момента. Этим обеспечивается исключение чг:енай 1(е).Ь "из суммарного сигнала с об- к Демоток определяемого выражения (1). Затем обычным методом компенсируютв полученных сигналах член 1 (1:). Кк и выделяют тем самым искомые сигналы Э,ПС Е .Для аналого-цифровой обработки таких ступенчатых синусно-косинусныхсигналов используют операцию компенсационного следяшего аналого-цифрового преобразования с фильтрапией высокочастотной составлякшей и интегрированием сигнала ошибки. Таким путем можно обрабатывать ступенчатые входные синусно-косинусные сигналы и тем самым реализовать высокук точость предлагаемого выделения сигналов ЭДС и в конечном счете достичьувеличения точности всей цепи перемещение ротора - аналоговые сигналыЭДС - цифровой код. Согласно этомуметоду один из сигналов ЭДС Е, =Е Г(г.) вп с 1) умножают на сов р(ц),оа другой сигнал Е= Е Г(1:) соэ Ы -она вп(ц), где Г - ступенчатая Фун 1 сция, Е - амплитуда сигналов ЭДС, Ы- положение подвижной части двигателя в Функции времени, р(ц)дискретный аргумент, Формируемый по выходному коду Б, являющемуся конечным результатом цифроаналоговой обработки.Затем получают разностный сигнал ошибки ц, равный ц Е, Г(г) вд.паЯй) совр(ц) сов,(1) . в з.пр(ц)Е, К(О впГ - р(цЦ(2) Аргумент р(ц) изменяют в зависимости от сигнала ц так, чтобы сигнал ошибки ц стремился к нулю. В этом случае с(1;) = р(ц), а выходной код М является цифровым эквивалентом преобразуемого параметра ,й),При изменении параметра 4(1) во времени в таком методе код И будет "отслеживать" его значение, постоянно компенсируя через изменение сигнал ошибки цюУстройство для реализации предлагаемого способа состоит из блока 1 возбуждения двигателя 2, блоков 3 и 4 хранения аналоговых сигналов, регуляторов 5 и 6 напряжения аналоговых сумматоров 7-9, аналого-цифровых перемножителей 10 и 11, Фильтра 12, интегратора 13, преобразователя напряжение - частота (ПНЧ) 14, блока 15 знака, реверсивного счетчика 16 и синусно-косинусного цифрового преобразователя 17. Блок возбуждения двигателя имеет три входа управления (Вх.1, Вх,.2 и Вх.3) режимом .движения двигателя, соответственно с помощью задания максимума 1 тока запитки, Фазовой скорости движения ы и интерваламежду ступеньками тока. Если блок возбуждения двигателя выполняется по схеме с внешней токовой обратной связью, то он имеет еше два входа (Вх.4 и Вх.5) для подключения к резистора обратной связи Ки К , включенным в цепь эа" пктки обмоток двигателя (укаэанные цепи показаны на чертеже пунктиром). Токовые выходы вых.1 и вых,2 блока 1 подключены к обмоткам двигателя 2.и информационным входам блоков 3 и 4 хранения аналоговых сигналов, Синхронизирующий вых.5 блока 1 соединен с управляющими входами блоков 3 и 4, выходы которых подключены к одним из входов сумматоров 7 и 8. Вых,3 и 45 159 блока 1 через регуляторы 5 и 6 свя- заны сдругими входами сумматоров 7 1 и 8. Выходы сумматоров 7 и 6 связаны с аналоговыми входами перемножителей 10 и 11, цифровые входы которых связаны соответственно с синусным и косинусным выходами преобразователя 17, вход которого подключен к выходу реверсивного счетчика 16. Выходы перемножителей 10 и 11 соединены с выходами сумматора 9, выход которого через последовательно включенные фильтр 12 и интегратор 13 связан с входом преобразователя 14 и блока 15 знака. Выходы последних соединены соответственно с тактовыми и знаковым входами реверсивного счетчика 16.Устройство работает следующим образом.Двигатель 2 с двумя ортогональными обмотками запитывают от блока 1 возбуждения двумя ступенчато изменяющимися синусно-косинусными токами.Далее выделяют сигналы ЭДС Еи Е(1) из суммарного напряжения П, и П на обмотках двигателя в дискретных точках. Для этого напряжения П, и Б с обмоток двигателя подают на информационные входы блоков 3 и 4 хранения. На входы управления этих блоков подают сигнал синхронизации с вых.5 блока 1. Этот сигнал представляет собой короткий импульс, по которому происходит запись напряжений П и Б в блоки хранения.В результате записи на выходе блоков 3 и 4 хранения появляются напряжения Б и П в момент записи. момент зааписи, т.е, момент поступления импульса синхронизации с блока 1, непосредственно предшествует очередному скачку тока в обмотках двигателя. Таким образом, с помощью элементов аналоговой памяти в виде блоков 3 и 4 Формируют исходные ступенчатые сигналы, равные напряжениям на обмотках двигателя в воменты перед скачком то" ков запитки и сохранявшие свое значение между этими моментами.Вычитают из исходных ступенчатых сигналов сигналы, равные падению напряжения от тока запитки на внешнем активном сопротивлении цепи запитки. Для этого на вых.3 и 4 формируют напряженияП = Б Ю(С)з 1 пуТИ) созИ4672 6где По = И , 1 - постоянный коэффициент.Пропускают эти сигналы через регуляторы 5 и 6 н устанавливают на их 5выходах напряжения, равныеБ 1, = 1 В., Г(1) зхпсо иПрг = оВ 1 Х(С) -созе 110Сигналы ЭДС Е (С) и Е(Е) получаютна выходе сумматоров 7 и 8 после вы"читания сигналов с блоков 3, 5 и 4,6 соответственно.По полученным ступенчатым синуснокосннусным сигналам ЭДС Еи1Е (й) определяют цифровой код положения ротора путем компенсационногоследящего аналого-цифрового преобразования с Фильтрацией высокочастотной составляющей и интегрированиемсигнала ошибки. Для этого подают сигналы ЭДС на аналоговый вход перемножителей 10 и 11. На цифровые входы 25 перемножителей поступают коды с синусно-косинусного преобразователя 17,на вход которого поступает циФровойкод Б с реверсивного счетчика 16. Вкачестве преобразователя может бытьиспользовано любое постоянное программируемое запоминающее устройство ссинусно-косинусной прошивкой, Полученные после перемножения сигналы свыходов перемножителей 10 и 11 вычитаются аналоговым сумматором 9. В результате на выходе сумматора получают сигнал ошибки. После фильтрациии интегрирования сигнала ошибки блоками 12 и 13 он поступает на входы 40 ПНЧ 14 и блока 15 знака. В зависимости от знака и значения сигнала ошибки реверсивный счетчик осуществляетизменения кода Я. на его выходе. Этоизменение делают таким, чтобы сигнал ошибки на выходе, блока 9 при изменении И стремился к нулю. В этомслучае по цифровому коду И на выходе реверсивного счетчика определяюттекушее положение ротора двигателя.Таким образом, предлагаемый способпо сравнению с известным позволяетповысить точность определения положения ротора двигателя и обладаетпо сравнению с ним рядом преимуществ.При увеличении точности расширяется и диапазон допустимых скоростейдвижения ротора, так как точность выделения и обработки сигналов ЭДС независит от их уровня и частоты.1594672 Составитель В. АлфимовЛазоренко Техред М,Дидык Корректор С Черниг,едакт Заказ 28 Тираж Подписноеетениям и открытиям при ГКНТ Сшская наб., д. 4/5 ВНИИПИ Государственного 113035омитет по изо осква, Ж, Р твенно-издательский комбинат Патент , г.ужгород, ул. Гагарина,1 роиз Обеспечивается возможность точного определения положения ротора ши.рокого класса двигателей, имеющих большую и непостоянную величину ин 5 дуктивности обмоток (например, ппанарного шагового двигателя на воздушной подушке).. Существенно упрощается реализующее способ устройство при резком 10 сокращении в нем числа необходимых регулировок - всего до двух.Исключаются грубые случайные ошибки определения положения ротора, т.е. увеличивается помехозащищенность за 15 счет наличия эФФекта усреднения конечного результата.Ф о р м у л а и з о б р е т енияСпособ определения положения ротора шагового двигатепя с парами орто О гонально расположенных обмоток, включающий питание одной обмотки в паресинусоидальным, а другой - косинусоидальным токами, выделение на каждойобмотке ЭДС движения и преобразованиеих в цифровой код, о т л ич а ю -щ и й с я тем, что, с целью повышения точности, упомянутые токи изменяют скачками, ЭДС движения выделяютв моменты времени, предшествующиескачкам, вычитают.из них падения напряжения на активном сопротивленииобмоток и результаты преобразуют вциФровой код посредством нелинейногокомпенсационного аналого-цифровогопреобразования с фильтрацией и интегрированием ошибки.
СмотретьЗаявка
4627745, 11.11.1988
МОСКОВСКИЙ ЭНЕРГЕТИЧЕСКИЙ ИНСТИТУТ
ИВОБОТЕНКО БОРИС АЛЕКСЕЕВИЧ, КОЖИН СЕРГЕЙ СЕРГЕЕВИЧ, ЛАНДАУ АНАТОЛИЙ ЛЕОНИДОВИЧ, ПРЫТКОВ ВЛАДИМИР ГЕОРГИЕВИЧ
МПК / Метки
МПК: H02P 8/00
Метки: двигателя, положения, ротора, шагового
Опубликовано: 23.09.1990
Код ссылки
<a href="https://patents.su/4-1594672-sposob-opredeleniya-polozheniya-rotora-shagovogo-dvigatelya.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения положения ротора шагового двигателя</a>
Устройство для записи тестовых сигналов в блоки магнитной памяти

Номер патента: 1259341
Опубликовано: 23.09.1986
Авторы: Виленчик, Вичес, Мучиев
МПК: G11C 29/00
Метки: блоки, записи, магнитной, памяти, сигналов, тестовых
...второй - формирование контрольных сигналов,Управление этапами работы осуществляется Формирователями 12 и 13 и триггером 3. В момент окончания Формирования синхросигналов или по достижении максимального значения счетчиком 5 Формирователь 13 вырабатывает управляющий импульс конец первого этапа цикла) который постуг.яет на вход счетчика 5 приводя его ь начальное состояние (на выходах Образуется двоичная комбинация, равпяя разности между максимальным значением счета счетчика 5 и длитель ностью синхросигнала), а также - на вход сброса триггера 3, изменяя его состояние. Нри этом на инверсном выходе триггера 3 образуется высокий потенциал поступающий на вход счет"1 икязяпрещяя егО работу(0 3. 45 50 5 со 15 2 11 25 На прямом выходе...
Центробежный регулятор частоты вращения коленчатого вала двигателя внутреннего сгорания с датчиком температуры блока

Номер патента: 1011881
Опубликовано: 15.04.1983
Авторы: Балычев, Грищенко, Стрекопытов
МПК: F02D 1/04
Метки: блока, вала, внутреннего, вращения, датчиком, двигателя, коленчатого, регулятор, сгорания, температуры, центробежный, частоты
...частоты вращения коленчатоговала двигателя внутреннего сгорания с датчиком температуры блока, содержащийцентробежный измеритель скорости, расположенный в корпусе и кинематически связанный с золотниковым распорядительнымэлементом, соединяющим между собой сервомотор снабженный силовым и компенсирующим поршнями и силовой пружиной, имаслосистему, снабженную ускорителем запуска, состоящим из вспомогательного поршня, нагруженного с одной стороны силовойпружиной, и разгрузочной пусковой пружины, установленной между корпусом сервомотора и силовым поршнем, снабжен подвижным упором, установленным между, вспомогательным поршнем и корпусом, и выпол-ненным в виде изолированной емкости с рабочим телом, соединенной при помощи канала с датчиком...
Преобразователь фазомодулированных сигналов в частотно модулированные сигналы
Номер патента: 1501249
Опубликовано: 15.08.1989
МПК: H03C 3/06
Метки: модулированные, сигналов, сигналы, фазомодулированных, частотно
...сигнала, поступающие на второй вход смесителя 6. После пребразвация в смесителях 6 и 7 эти флуктуации поступают на вход широкополосного усилителя Й.Таким образом, широкополосный усилитель 8 оказьнается охваченным це пью обратной связи, входом которой является вторй вход смесителя 6, а выходом - выход смесителя 7, Эта цепь обратной связи является четырехт- люсником братнси гнязи (ЧОС), 11 р 55 выполнении ус пццй ба 1 анса фаз ц амплитуд ц авго батеп цой сигтсме, образоваци и епццеццыми в кол ц,ипрон цпи ьм у цпцттп и 8 и 1 РС, цэцкают .иебацця с чагттой Г аавци й т раапсти фаз колебаний, п.тупанщих ца входы смесителей Ь и 7, Иа выходе смегитсля 6 вьде.нетс я ги цап с частотойгде Г- чагтота сигнала ца выходеаттецюаторов 4 и 5,Г -...
Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором

Номер патента: 1067583
Опубликовано: 15.01.1984
Авторы: Бродовский, Иванов, Туровский
МПК: H02P 7/42
Метки: асинхронного, вала, вращения, гармонических, двигателя, ротором, сигналов, фазным, частоты
...асинхронного двигателя с фазным ротором, включенного в состав управляемого электропривода; 60 йа фиг.2 - электрическая схема фазы формирователя приращений опорный сигналов,; на фиг.3 - временная диаг.- рамма его работы; на фиг.4 - электрическая схема фазы блока памяти; , 65 на фиг.5 - временная диаграмма его работы, на фиг.б - схема размещения обмоток двухфазного асинхронного двигателя с фазным ротором.устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором содержит Датчики Фазных токов статора 1 (фиг.1) и датчики фазных параметров ротора 2,. связанные с входами формирователя гармонических сигналов 3, фазные выходы которого образуют фазные .выходы устройства. В устройство введены...
Устройство для измерения эдс воспроизведения видеоголовки блока вращающихся головок

Номер патента: 1688282
Опубликовано: 30.10.1991
МПК: G11B 5/455
Метки: блока, видеоголовки, воспроизведения, вращающихся, головок, эдс
...возможен эффект неупругой деформации магнитной ленты, разрушение магнитного слоя или прореэзние основы ленты, Если ось вращения барабана сместить от его оси симметрии нэ величину, меньшую указанной,то при вращении барабана величина врезания видеоголовки в магнитную ленту на достигнет величины номинальноговылета видеоголовки в БВГ, т,е. не обеспечивается оптимальный контакт в системе головка - лента. А зто значит, чтомаксимальная ЭДС воспроизведения виде- оголовки не измерена. Предварительная установка испытытуемой видеоголовки на расстоянии ее рабочей поверхности от оси вращения барабана, равном веллчине раз-ности радиуса барабана и половины суммы номинального вцлета рабочей поверхности видеоголовки за образующую барабана БВГ и допуска...
Предыдущий патент: Устройство для управления машиной двойного питания
Следующий патент: Универсальный дvт триггер
Случайный патент: Ленточный высевающий аппарат