Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
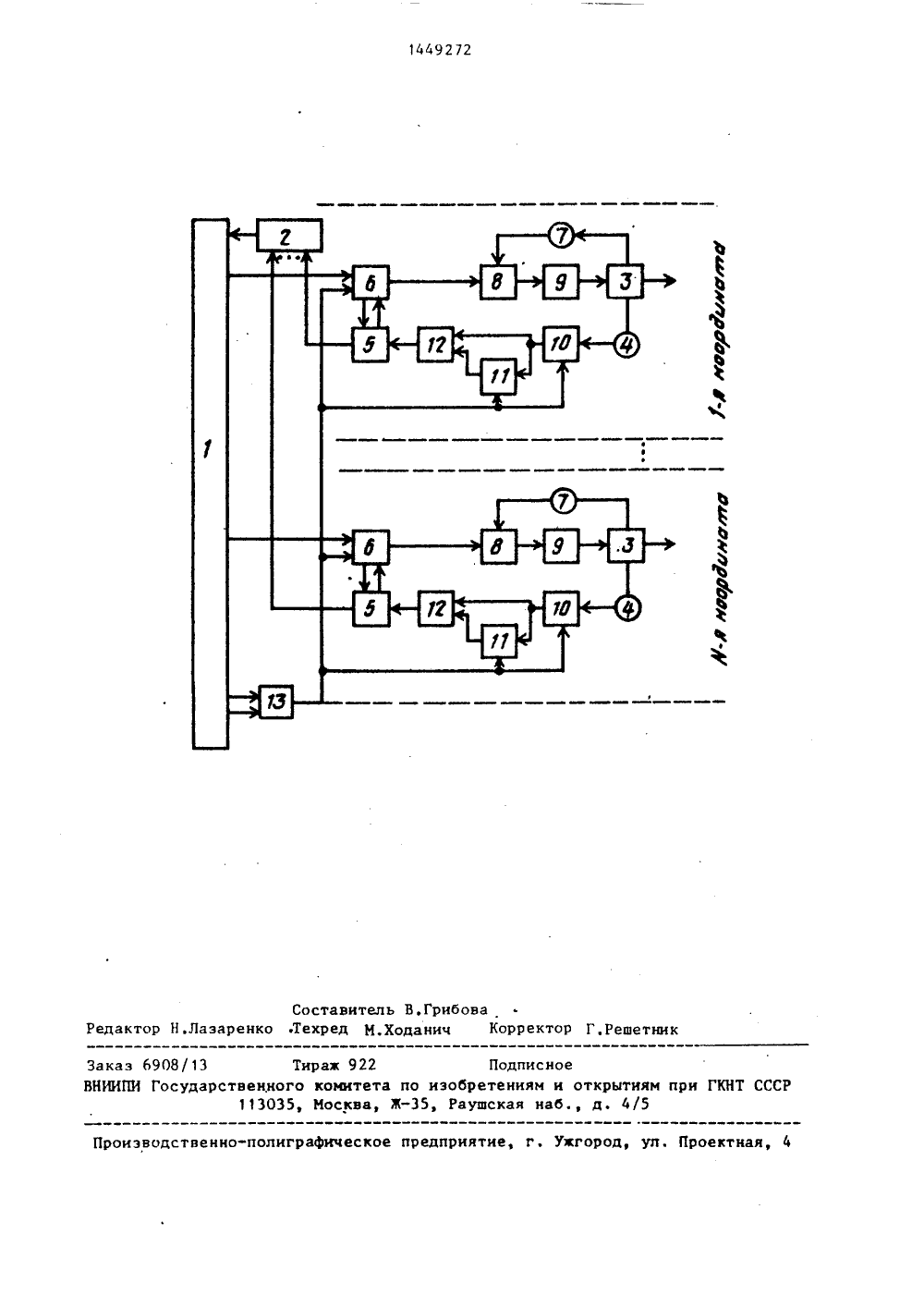
Изобретение относится к автомати зации сварочных процессов и может бьггь использовано в устройствах управления промышленными роботами для дуговой сварки неллавящимся электродом, плазменного нанесения покрытий и т.п.Цель изобретения - повьппение помехоустойчивости устройства1 ОНа чертеже дана функциональная схема устройства,Устройство для программного управления промьппленным роботом содержит блок 1 памяти, элемент И 2 и по 15 каждой регулируемой координате привод 3, датчик 4 положения, блок 5 контроля положения, блок 6 задания скорости, датчик 7 скорости, суммагор 8, усйлитель 9, управляемый ключ 20 10, буферный регистр 11, элемент ИЛИ 12 и управляемый одновибратор 13. Первые Я выходов блока 1 памяти соединены с первыми входами блоков 6 задания скорости, первые выходы которых подключены к первым входам сумматоров 8. Выходы сумматоров 8 подключены к входам усилителей 9, выходы которых подключены к приводам 3. Первые выходы приводов 3 связаны с вхо дом датчиков 4 положения, выходы которых подсоединены к первым входам управляемых ключей 10. Вторые выходы приводов 3 подключены к датчикам 7 скорости. Выходы датчиков 7 соединеныс вторыми входами сумматоров 8, Второй выход блока 6 задания скорости соединен с первым входом блока 5 контроля положения. Второй выход этого блока в свою очередь подключен к второму входу блока 6 задания скорости. Выход управляемого ключа 10 подключен к первому входу буферного регистра 11 и второму входу элемента ИЛИ 12. Выход буферного регистра 11 подключен 45первому входу элемента ИЛИ 12, выход которого соединен со вторым входом блока 5 контроля положения, И входов элемента И 2 соединены с первыми выходами блоков 5 контроля положения соответствующих координат,а его выход - с входом блока 1 памяти. Выход управляемого одновибратора 13 соединен с вторыми входами буферных РегистРов 11 и управляемых ключей 10 и третьими входами блоков 6 задания скорости, а его два входа соответственно с (3+1)-м и (И+2)-м выходами блока 1 памяти. Блок 6 задания скорости сопержит цифроаналоговый преобразователь с регистром данных, который обнуляется по сигналу на втором входе блока 6 задания скорости. Прием информации с него блокируется по сигналу на третьем входе блока 6 задания ско- рости. Кроме того, он содержит еще один регистр, в котором хранится конечное значение перемещения по данной координате.Устройство рабртает следующим образом.В блоке 1 памяти хранится програм. ма перемещения рабочего органа промышленного робота, заданная любым из известных методов. В начале воспроизведения программы на первых выходах блока 1 памяти устанавливаются управляющие сигналы для приводов 3. В блоки 6 задания скорости для каждой координаты поступают кодовые сигналы координатной скорости приводов 3 и значения конечной точки перемещения ло данной координате в текущем кадре программы. Аналоговый сигнал с первого выхода блока 6 задания скорости, пропорциональный заданной скорости движения координаты, через сумматор 8 и усилитель 9 воздействует на привод 3, Обратная связь по скорости, заведенная от датчика 7 скорости на второй вход сумматора 8, используется для стаби-, лизации величины скорости перемеще" ння ло данной координате. Датчик 4 положения координаты контролирует перемещение робота по данной координате и через управляемый ключ 10 и элемент ИЛИ 12 посылает величины перемещений координаты на второй вход блока 5 контроля положения и через управляемый ключ 10 на первый вход буферного регистра 11, который запоминает текущее значение величины перемещения и не выдает запоминаемых значений в отсутствие сигнала на втором своем входе, На первый вход блока 5 контроля положения поступают данные от блока Ь задания скорости о конечном положении координаты в данном кадре программы.При совпадении данных на первом и втором входах блока 5 контроля положения на егоыходах формируются сигналы, по котоым сбрасывается до нуля аналоговый сигнал задания координатной скорости, н на соответствующем входе элемента14492724И 2 появляется сигнал с уровнем ло - щаются электронные блоки управления,гической единицы. При наличии сигнала За счет этого повышается надежностьс уровнем логической единицы на всех устройства.входах элемента И 2, т,е, при обра -ботке заданных перемещений в данном5формулаизобретениякадре по всем Х координатам, на выхо- Устройство для программного управде элемента И 2 формируется сигнал, ления промышленным роботом, содержакоторый поступает на вход блока 1 щее блок памяти, элемент И и по каж -памяти и вызывает переход к выполне дой регулируемой координате последонию следующего кадра программы, что вательно соединенные блок заданиясопровождается изменеиием информации скорости, сумматор, усилитель, прина его выходах,При достижении какой-либо запро- контроля положения и датчик скоросграммированной точки траектории, на ти первые М выходов бл п) одов лока памяти подпример начала стыка свариваемых из- ключены к первым входам блоков зададелий (т,е, зажигания сварочной дуги ния скорости соответствуюетствующих координа К+2 выходе блока 1 памяти появля- нат, а вход блока памяти связан сется кодовый сигнал, поступающий на выходом элемента И, М входов которовторои вход управляеього одновибрато го соединены с первыми выходами блора 13Указанный кодовый сигнал про- ков контроля положения соответствую-,порционален длительности отрицатель- щих координат, первый вход которыхного импульса на выходе управляемого подключен к вторым выходам соответодновибратора 13, формируемого по ствующих блоков заданизадания скорости, астробирующему сигналу на его первом 25 вторые выходы блоков контроля половходе. Сигнал с выхода управляемого жения связаны с вторыми входами, блоодновибратора 13 поступает на третьи ков задания скорости теорости тех же коорди"входы блоков 6 задания скорости и нат, вход датчиков скорости соедиблокирует выдачу аналогового сигнала нен с вторым выходом приводов, а вына его второй выход на время длитель ход датчиков скорости - с вторым вхоности этого сигнала. Одновременно дом сумматора о т л иотл ич ающе еукаэанный сигнал поступает на вторые с я тем, что, с целью повышения повходы управляемых ключей 10 и буферных мехоустойчивости устройства, онорегистров 11.При этом управляемыйключ 10 отключает датчик 4 положе- З 5 ординате последовательно соединенныения, разрывая гальваническую связь УпРавляемый ключ, буферный .регистрмежду своими выходом и первым входом, и элемент ИЛИ, а также управляемыйа буферный регистр 11 переводится в одновибратор, выход которого подклюрежим воспроизведения, т.е. его выход- чен к вторым входам управляемых клюные вентили открываются, выдавая за чей и буферных регистров и третьемуписанную в нем информацию на первый входу блоков задания скорости пер)вход элемента ИЛИ 1212вый вход управляемых ключей соединенПосле окончания импульса на выходе с выходом датчиков положения а вы 1управляемого одновибратора 13, в те- ход каждого управляемого ключа связанчение которого осуществлялась рабо с втоРым входом соответствующегота осциллятора, снимается блокировка элемента ИЛИ и первым входом соответблока 6 задания скорости и он готов, ствующего буферного регистра, выходк управлению работой привода, откры- которого подключен к первому входувается управляющий ключ 10 и запира- элемента ИЛИ той же координаты, выходются выходные вентили буферного реги которого подключен к второму входустра 11, предотвращая выдачу инфор- соответствующего блока контроля помации с его выхода на первый вход ложения, первый и второй входы управэлемента ИЛИ 12, ляемого одночибратора связаны соотТ аким образом, в период возбужде- ветственно с (Я+1)-м и (И+2)-м выния дуги от воздействия помех защи ходами блока памяти,1449272 писное м при ГКНТ СССР эобретениям и открыт Раушская наб., д. 4 роиэводственно-полиграфическое предприятие, г. Ужгород, уп. Проектна Составитель В.Грибова едактор Н.Лазаренко .Техред М.Ходанич Корректор Г.РеаетникЗаказ Ь 908/13 Тирам 922 ВНИИПИ Государственного комитета по 113035, Москва, Ж
СмотретьЗаявка
4197065, 16.02.1987
ПРЕДПРИЯТИЕ ПЯ А-7332
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ШАНГИН АЛЕКСАНДР НИКОЛАЕВИЧ, ПАПКОВ ЮРИЙ СТЕПАНОВИЧ, ЛЯСКАЛО ВЛАДИМИР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: B23K 9/10
Метки: программного, промышленным, роботом
Опубликовано: 07.01.1989
Код ссылки
<a href="https://patents.su/4-1449272-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Устройство для адресования транспортного средства

Номер патента: 746563
Опубликовано: 05.07.1980
Авторы: Клоц, Могилевер, Сирота
МПК: G06F 15/50
Метки: адресования, средства, транспортного
...устройство содержит блок 1 зацания адреса, блок сравнения 2,выходы которого соединены с шинами сложения и вычитания реверсивного счетчйка З,элемент ИЛИ 4,триггер 5 исходногб положения,- вход которого соединен с датчиком б исходного положения, прямой выход триггера соединен с одним из входов элемента И 7, а второй вход элемента И 7 - с датчиком 8 обратной связи, инверсный выход триггера соединен с элементом И 9, второй вход которого соединен с выходом элемента ИЛИ 4, блок 10 управления исполнительными механизмами, элементы И 11, И 12,ИЛИ 13. ПРедлагаемое устройство работаетследующим образом.При включении устройства блокзадания адреса 1 очищен и на его выходах 2 , 2 , 2 , 2 , а также нао л и- оинверсном выходе триггера 5...
Устройство для настройки терморегуляторов с релейным элементом на выходе

Номер патента: 1084764
Опубликовано: 07.04.1984
Авторы: Базаров, Бирюков, Ершова, Семовских
МПК: G05D 23/19
Метки: выходе, настройки, релейным, терморегуляторов, элементом
...памяти, первый вход которого через третий элемент И соединен с первыми входами четвертого, пятого и шестого элементов И и свыходом второго элементапамяти, второй вход третьего элемента памяти, являющийся первым информационным входом блока настройки, связан с первым входом второго элемента И и в,горым входом шестого элемен та И, третий вход которого, являющий- ся первым управляюшим входом блоканастройки, подключен к второму входутретьего элемента И и первому входупервого элемента памяти, вторым входом связанного с первым входом второгО элемента памяти, а выходом черезпервый элемент И с вторым входомвторого элемента памяти, причем втозрой вход первого элемента И, являющийся вторым управляющим входомблока настройки, связан с вторымвходом...
Устройство для приведения объектав заданное положение

Номер патента: 830297
Опубликовано: 15.05.1981
Авторы: Вонятыцкий, Гальчевская, Капусенко
МПК: G05B 11/01
Метки: заданное, объектав, положение, приведения
...соответственно со вхоовдами элементов (п-щ+1)ИИЛИ 1310 и (щ+1)ИИЛИ 14, выходы которых соединены со входами элемента 2 И-НЕ 16, выход которого является выходом элемента (и+1)И 2 ИЛИ-НЕ 1 О, а выход элемента(и-щ+1) ИИЛИ 14 является прямымвыходом и-щ старших разрядов элемен.та(п +1)ИИЛИ-НЕ О.Устройство работает следующимобразом,20 Координаты объекта 1, задаваемыезадатчиком 2 в некотором цифровомкоде, преобразуются преобразователем 3 код-код в стандартный двоичныйкод Йз ,инверсное значение которого25 Й поступает на входы второго числа сумматора 4. Координаты текущегоположения объекта 1 воспринимаютсядатчиком 5 положения объекта и, выдаваемые в некотором цифровом коде,30 преобразуются преобразователем 6код-код в стандартный двоичный...
Устройство для определения соответствия скорости электропривода заданной

Номер патента: 1098097
Опубликовано: 15.06.1984
Автор: Шепелин
МПК: H02P 5/06
Метки: заданной, скорости, соответствия, электропривода
...конденсатор блока задержки, вход нуль-органа соединен с выходом усилителя, авыход - с входом преобразователяуровня в однополярный сигнал, выходкоторого соединен с управляющим входом ключа.На фиг. 1 приведена схема устройства; на фиг. 2 - временнше диаграммы ь 1 оясняющие его работу 1,О - О, -9 1 2напряжение на выходе соответствующих элементов).БОУстройство для определения соответствия скорости электропривода заданной фиг. 1) содержит последовательно соединенные задатчик скорости 1, сумматор 2, усилитель 3, регулятор скорости 4, а также датчик53скорости э, выход которого соединенс вторым входом сумматора 2, преобразователь. уровня в однаполяоныйсигнал 6 через блок задержки 7 вы3 1098097 4полненный на резисторе 8 и конденсаторе 9,...
Устройство для остановки шпинделя в заданном положении

Номер патента: 1148555
Опубликовано: 30.03.1985
МПК: B23Q 5/00
Метки: заданном, остановки, положении, шпинделя
...сигнала М 2 Р блок 25, формирующий сигнал, соответствующий отклонению от определенного положения, вначале генерирует в качестве 2 О сигнала, соответствующего отклонению от, определенного положения, первоначально установленное напряжение 9/. Под воздействием этого сигнала шпиндель снова начинает вращать- ф 5 ся, такчто сигнал АЧ, определяющий реальное значение скорости, возрастает таким образом, чтобы достичь величины Ч; . По мере того, как магнит части 10 е, установленный 30 на шпинделе, продолжает вращаться и достигнет первый раз заранее .определенного положения (момент времени), блок 25, формирующий. сигнал, соответствующий отклонению от заранее определенного положения, генерирует сигнал СРР, определяющий гру-. бое отклонение от...
Предыдущий патент: Ограничитель напряжения холостого хода сварочного трансформатора
Следующий патент: Способ импульсной дуговой сварки
Случайный патент: Устройство для дистанционного наблюдения за перемещением точки в плоскости