Устройство для контроля и регулирования угла нутации конуса инерционной дробилки
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1416181
Авторы: Афанасьев, Иванов, Константинов, Макаров, Троицкий




Текст
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН А 1 1416 1) 4 В 02 С 25/00 ОПИСАНИЕ ИЗОБРЕТЕН М АВТОРСМОМУ СВИДЕТЕЛЬСТВУ виж дро ГОСУДАРСТВЕННЫЙ НОМИТЕТ СС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКР(71) Всесоюзный научно-исследовательский и проектный институт механической обработки полезных ископаемых(56) Авторское свидетельство СССРУ 940844, кл. В 02 С 25/00, 1977.Авторское свидетельство СССРВ 1217474, кл. В 02 С 25/00, 1984.(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ УГЛА НУТАЦИИ КОНУСА ИНЕРЦИОННОЙ ДРОБИЛКИ(57) Изобретение относится к устроиствам для контроля и регулированияугла нутации конуса инерционной дробилки. Целью изобретения являетсяповышение точности и надежности регулирования, Устройство используется для программного. перемещения под ной регулируемой части конусной билки, например чаши, по отношению к конусу на расстояние, определяемое условием экономичной работы дробилки. Принцип действия устройства основан на измерении периода вращения конуса вокруг своей оси, который линейно зависит от угла нутации конуса, Устройство содержит датчик 1, выпрямитель 2, интегратор 3, измеритель 4 временных интервалов, компаратор 5, блок 6 кодовых установок условий включения- выключения исполнительного механизма 7 для изменения положения подвижной регулируемой части дробилки и приводного двигателя 8, а датчик выполнен в виде цилиндра, связанного с корпу.сом дробилки сосредством цангового зажима и несущего чувствительный элемент, возбуждаемый контролируемымэлементом, установленным на внешней поверхности конуса. 1 з.п. Ф-лы,3 ил.Изобретение относится к устройствам, предназначенным для контроля и регулирования работы конусных инерционных дробилок. 5Целью изобретения является повышение точности и надежности регулирования,На фиг,1 приведена блок-схема устройства для контроля и регулирова" О ния угла нутации конуса инерционной дробилки; на фиг.2 - показано расположение в конусной инерционной дробилке датчика, входящего в состав устройства; на фиг.3 - вариант конструкции датчика.Устройство содержит датчик 1 , выпрямитель 2, интегратор 3, измеритель 4 временных интервалов, компаратор(блок сравнения), блок 6 кодовых 20 установок условий управления работой исполнительного механизма 7 и приводрого двигателя 8, подключенных к вы 1 оду компаратора 5.25Конусная инерционная дробилка, для регулирования которой предназначено предлагаемое устройство, содержит конус 9, который жестко закреплен на валу 10 и поддерживается 30 опорой 11, связанной с корпусом 12 дробилки, и подвижную регулируемую часть - чашу )3, расположенную над конусом 9, причем ось )4 чаши 13 является вертикальной осью дробил 35 ки и в состоянии, когда вал 1 О неподвижен, его ось и, следовательно, ось конуса 9 практически совпадают с вертикальной осью 14. При качаниях зала 10 его ось 15 образует с верти кальной осью 14 угол ,который определяет разгрузочное отверстие 8. Для изменения параметра Я чаша 13 устас новлена в корпусе 12 с возможностью перемещения относительно конуса 9, 45 что осуществляется с помощью исполнительного механизма 7. Вал 10 конуса 9 нижним концом помещен во втулку 6, на которой закреплен дебаланс 17. Вращение последнему передается от двигателя 8 с помощью, например, шарового шпинделя 18, верхняя головка которого шарнирно установлена во втулке 16. Датчик 1 содержит контролируемый элемент 19, установленный иа внешней поверхности конуса 9 в нижней его части, и чувствительный .элемент 20, жестко связанный с корпусом 12 дробилки. В качестве контролируемого элемента 19 можно использовать, например, постоянные магниты 21, снабженные соответствующей арматурой 22 их крепления к конусу 9 для защиты от воздействия падающей руды и формирующие магнитное поле согласно назначению датчика. Чувствительный элемент 20 датчика может быть выполнен в виде ферромагнитного цилиндра 23 с сердечником 24 и шайбой 25, образующими магнитопровод, несущий сосредоточенно расположенную катушку индуктивности - обмотку 26 возбуждения, при этом шаиба 27 выполнена из немагнитного материала, Цилиндр 23 посредством цангового зажима, состоящего из сухаря 28, бобьплки 29 и фланца 30, прикреплен к корпусу 12 дробилки. Такое крепление обеспечивает возможность изменения положения обмоки 26 возбуждения по отношению к магниту 21, что позволяет устанавливать оптимальную магнитную связь между контролируемым элементом 19 и чувствительным элементом 20. Устройство работает следующим образом,Под действием крутящего моментаМ дебаланс 17 вращается с частотойГ вокруг вала 10 конуса 9. Последнийв режиме холостого хода ббкатываетсяпо внутреннеи поверхности чаши 13,а в рабочем режиме - по дробимомуматериалу. Контролируемый элемент 19при этом движется по эпициклоиде, совершая один оборот вокруг вертикальной оси 14 за время Т. В спектре такого движения элемента 19 преобладаютдве частоты: частота Г, вращения конуса вокруг оси 14 и частота Г вращения дебаланса 17. При прохожденииэлемента 19 в зоне чувствительностиэлемента 20 последний возбуждаетсяи вырабатывает импульс, поступающийна вход выпрямителя 2, Выпрямленныйсигнал поступает далее на вход интегратора 3, который выделяет огибающуюсигнала. Сигналы 31,32 и 33 на выходах датчика 1, выпрямителя 2 и интегратора 3 соответственно показанына фиг.1. С выхода интегратора 3сигнал 33 поступает на вход измерителя 4 временных интервалов Т, с выхода которого нормированный сигналпоступает на первый вход компаратора5, на другие входы которого с выходовз 14161 блока 6 поступают коды условий включения-выключения исполнительного механизма 7 и коды условий отключения приводного двигателя 8, Эти условия5 включают в себя режим экономичной работы машины и нарушения этого режима (например, попадание недробимого тела , отсутствие питания). Так, например, для конусной инерционной дробилки с диаметром конуса 200 мм режим нормальной работы наблюдается при условии 2 ( Т ( 5,2 с, причем при Т = 2 с, что соответствует разгрузочному отверстию Я = 6 мм; включает ся исполнительный механизм 7 для ,регулирования положения чаши 13, и при Т = 5,2 с, что соответствует Б - "4 мм, исполнительный механизм 7 выключается. Таким образом, угол20 и ширина разгрузочного отверстия Ъ поддерживаются в заданных пределах. При Т 6 1 с наблюдается отсутствие питания и приводной двигатель 8 выключается; при Т "- 0,04 с фиксируются , 25 попадания недробимого тела и приводной двигатель 8 также выключается.Таким образом, предлагаемым устройством достигается идентификация положений корпуса и нарушений техноло-З 0 гического режима работы инерционной дробилки, обеспечивается программное перемещение регулируемой чаши цо отношению к конусу на расстояние, определяемое условием экономичной работы дробилки.Использование устройства повышает точность и надежность регулирования угла , что достигается усовершенствованием электронной схемы устройст О ва. Это позволяет установить датчик 81в месте, доступном для осмотра и ремонта. Повышение точности регулирования позволяет увеличить выход продукта заданной крупности на 3-57.Формула изобретения1. Устройство для контроля и регулирования угла нутации конуса инерционной дробилки, содержащее датчик частоты вращения конуса, измеритель временных интервалов, компаратор, блок кодовых установок условий управления работой исполнительного мехайизма для изменения положения чаши и приводного двигателя, о т л и" ч а ю щ е е с я тем, что, с целью повышения точности и надежности регулирования, оно дополнительно снабжено выпрямителем и интегратором, при этом датчик частоты вращения конуса подключен к входу выпрямителя, выход которого соединен с входом интегратора, а выход последнего через измеритель временных интервалов связан с одним из входов компаратора, другие входы которого соединены с блоком кодовых установок условий управления работой исполнительного механизма для изменения положения чаши и приводного двигателя, подключенных к выходу компаратора.2. Устройство по п.1, о т л и ч а ю ш е е с я тем, что датчик выполнен в виде цилиндрической втулки с чувствительным элементом, возбуждаемым смонтированным на внешней стороне конуса контролируемым элементом, при этом датчик посредством цангового зажима закреплен на корпусе дробилки.1416181 Составитель В.ГубаРедактор И.Рыбченко Техред А.Кравчук орректор Н,Король Заказ 4006/ 3 зводственно-полиграфическое предприятие, г, Ужгород, ул. 11 роектная Тираж 583ИИПИ Государствпо делам изобр5, Москва, ЖПодписноеного комитета СССРений и открытийРаушская наб., д, 4/
СмотретьЗаявка
4168787, 29.12.1986
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНЫЙ ИНСТИТУТ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ "МЕХАНОБР"
АФАНАСЬЕВ МИХАИЛ МИХАЙЛОВИЧ, ИВАНОВ БОРИС ГАВРИЛОВИЧ, ИВАНОВ НИКОЛАЙ АЛЕКСЕЕВИЧ, КОНСТАНТИНОВ ЕВГЕНИЙ АЛЕКСАНДРОВИЧ, МАКАРОВ ВАЛЕРИЙ АЛЕКСАНДРОВИЧ, ТРОИЦКИЙ БОРИС КОНСТАНТИНОВИЧ
МПК / Метки
МПК: B02C 25/00
Метки: дробилки, инерционной, конуса, нутации, угла
Опубликовано: 15.08.1988
Код ссылки
<a href="https://patents.su/4-1416181-ustrojjstvo-dlya-kontrolya-i-regulirovaniya-ugla-nutacii-konusa-inercionnojj-drobilki.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для контроля и регулирования угла нутации конуса инерционной дробилки</a>
Устройство для регистрации времени работы двигателя

Номер патента: 1034056
Опубликовано: 07.08.1983
Авторы: Самвелян, Тер-Мартиросян
МПК: G07C 3/00
Метки: времени, двигателя, работы, регистрации
...выходов блока управления через элементНЕ соединен с управляющими входамиключейНа чертеже приведена блок-схемаустройства для регистрации времениработы двигателя.Устройство содержит тахогенератор1, преобразователь 2 частоты в напряжение, термочувствительную мостовуюсхему 3, усилитель 4, блок 5 сравнения, управляемый источник б опорногонапряжения, содержащий первый резистор 7, остальные резисторы 8,. ключи.9, первый и второй триггеры 10 и 11,элементы И 12, счетчики 13, блок 14управления, допблнительные элементы:сумматор 15, запоминающий конденсатор 16, первый, второй и третий ключи 17, 18 и 19 и элемент НЕ 20,Устройство работает следующим образом,Сигнал от тахогенератора 1 преоб разовывается в аналоговый электрический сигнал...
Способ работы двигателя внутреннего сгорания

Номер патента: 1277066
Опубликовано: 15.12.1986
МПК: G05B 13/02
Метки: внутреннего, двигателя, работы, сгорания
...эксплуатации слут чае в расходную цистерну 1 топливо поступает после сепаратора, и при этом его температура оказывается близкой к той, которая обеспечивает требуемую минимальную вязкость, В этом случае регулирующий органсмеситель 9 работает с большим коэффициентом усиления, при котором не обеспечивается устойчивая работа системы.Для предотвращения этого предусмотрена установка. охладителя 7 топлива. При этом, к регулирующему органу-смесителю 9 поступает подогретое и охлажденное топливо, а регулятор-смеситель работает с меньшим коэффициентом усиления, Далее процесс регулирования происходит аналогично указанному.Оптимальная величина потока охлажденного топлива с точки зрения максимальной технико-эксплуатационнойэффективности системы...
Способ работы двигателя внутреннего сгорания

Номер патента: 1437527
Опубликовано: 15.11.1988
Авторы: Крохта, Лесовицкий, Усатых
МПК: F02B 37/00
Метки: внутреннего, двигателя, работы, сгорания
...перепускной воздушный клапан 8 по обводному воздухопроводу 9Клапан 8 открывается под действием разности давлений между впускным ресивером, где создается разрежение, и атмосферой. В процессе работы двигателя сигналы с датчика 4 нагрузки, датчика 5 частоты вращения коленчатого вала и датчика 6 температуры атмосферного воздуха постоянно поступают в блок 7 управления, где происходит сравнение показателей от датчиков 4 и 5 с заданными значениями, При достижении двигателем полной нагрузки на данном скорост ном режиме блок 7 управления выдает управляющий сигнал на исполнительный механизм 3 и газораспределительный орган 2 направляет весь поток отработавших газов через турбину, Частота вращения ротора турбокомпрессора 1, работавшего...
Способ работы двигателя внутреннего сгорания и двигатель внутреннего сгорания
Номер патента: 1663210
Опубликовано: 15.07.1991
Автор: Давыденко
МПК: F02B 27/00
Метки: внутреннего, двигатель, двигателя, работы, сгорания
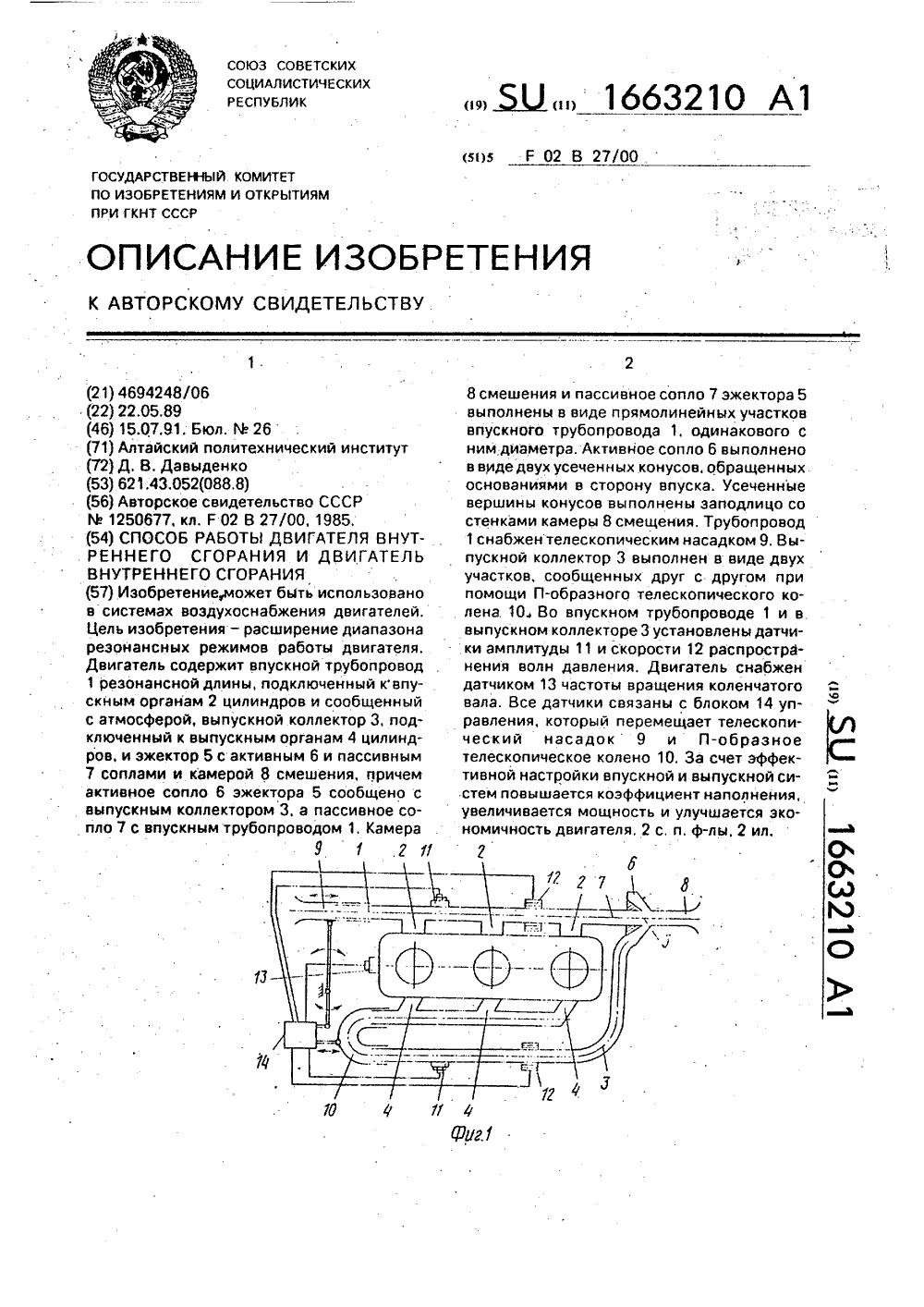
...отношения длин от единицы в любую сторону ухудшает качество системы впуска, что выражается в более низких амплитудах волн и более низком наполнении, однако в диапазоне 0,7 - 1,5 это ухудшение составляет не более 20%.Двигатель работает следующим образом. На такте впуска одного из цилиндров, например первого, его объем соединяется с обьемом впускного. трубопровода 1. В ре 10 зультате волна разрежения из цилиндра передается во впускной трубопровод 1 и распространяется по обе стороны к открытым торцам впускного трубопровода 1, Нт 15 открытых торцов волна разрежения отражается с переменой знака, т. е, волной давления и движется обратно к выпускным органам 2 цилиндров,20 Когда отраженная волна давления во впускном трубопроводе 1...
Устройство для учета времени работы двигателя

Номер патента: 442498
Опубликовано: 05.09.1974
Авторы: Абелиов, Николаенко, Новиков, Шувалов
МПК: G07C 3/10
Метки: времени, двигателя, работы, учета
...цель достигается теления выполнена на двухсов, подключенных к част 1 эталонному генератору, вь д р 5 динены с дешифраторами.На чертеже дана блок-схема устройства, которое содержит частотные датчики 1 и 2 с на.грузочного и скоростного режимов двигателя соответственно, счетчики импульсов 3 и 4, 10 которые работают в течение интервала времени, задаваемого эталонным генератором 5.Частота импульсов генератора 5 должна быть меньше, чем низшая частота импульсов частотных датчиков 1 и 2 и поступает на счетчи ки импульсов 3 и 4 соответственно, которыеработают в течение интервала времени, задаваемого генератором 5. Частота импульсов генератора 5 должна быть меньше, чем частота импульсов датчиков 1 и 2. Дешифратор 6, оп 20 ределяющий состояние...
Предыдущий патент: Система стабилизации грансостава материала для группы параллельно работающих дробилок
Следующий патент: Система регулирования помола двухкомпонентной смеси
Случайный патент: Цифровой регулятор скорости вращения электрического привода