Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
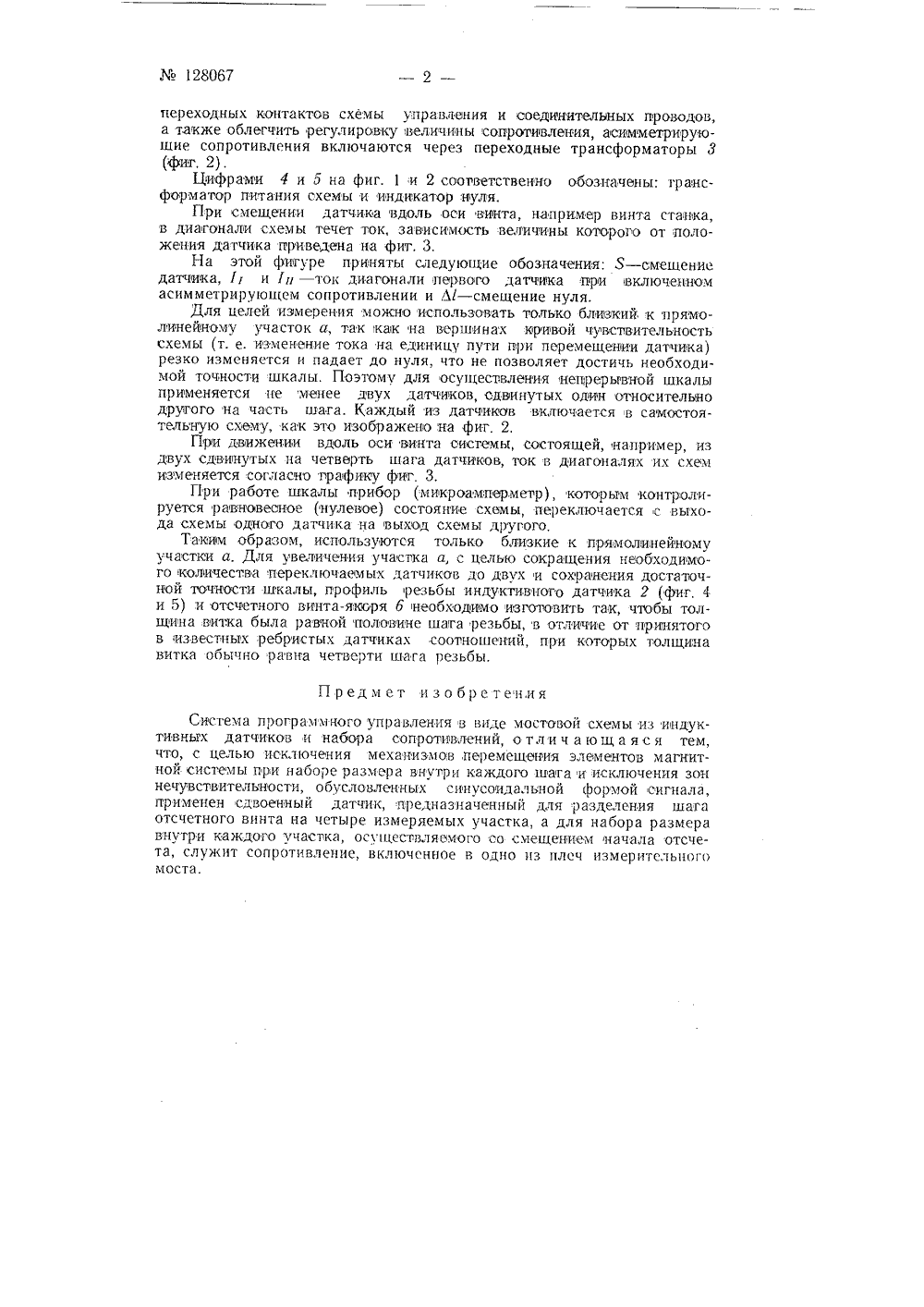
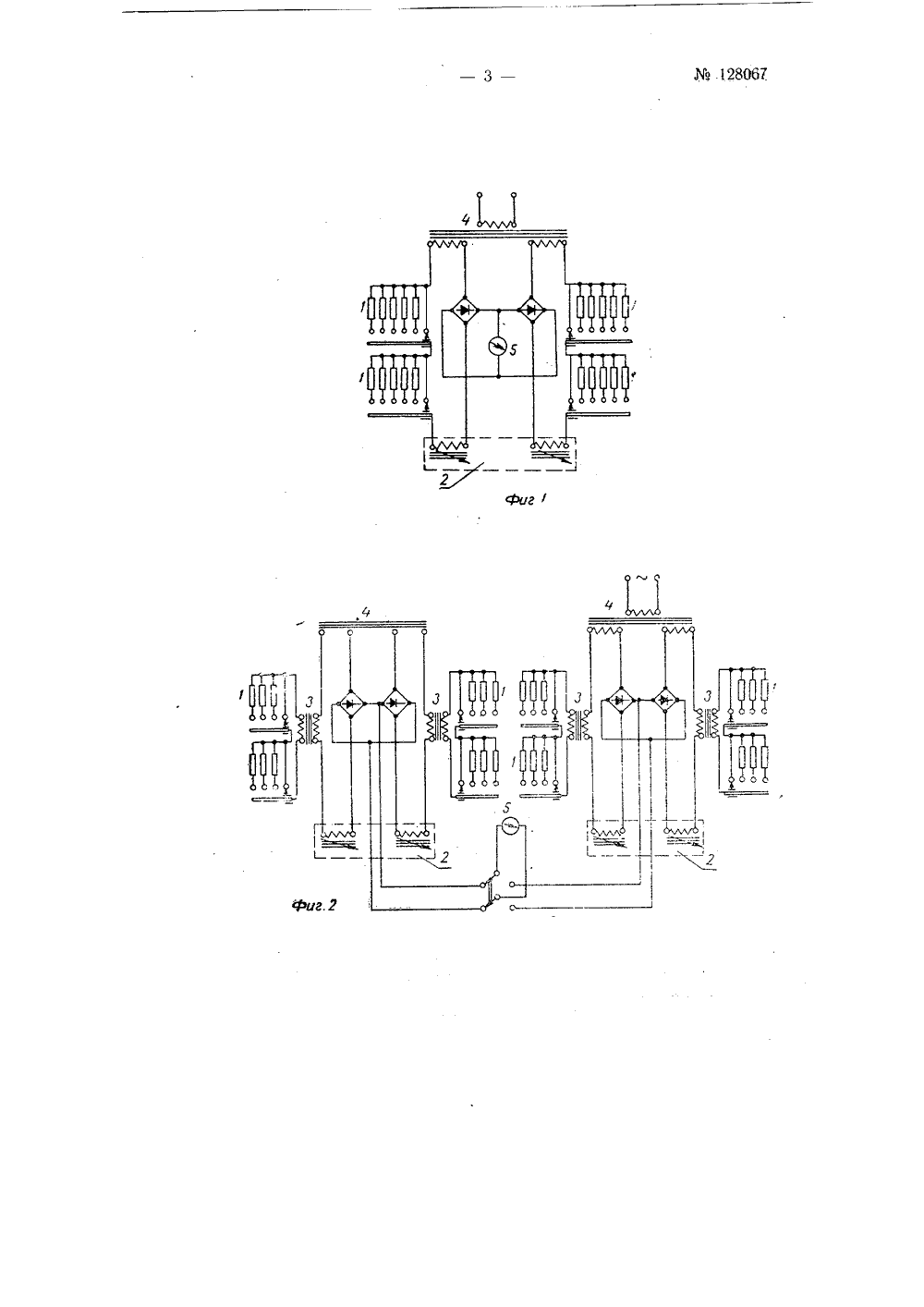
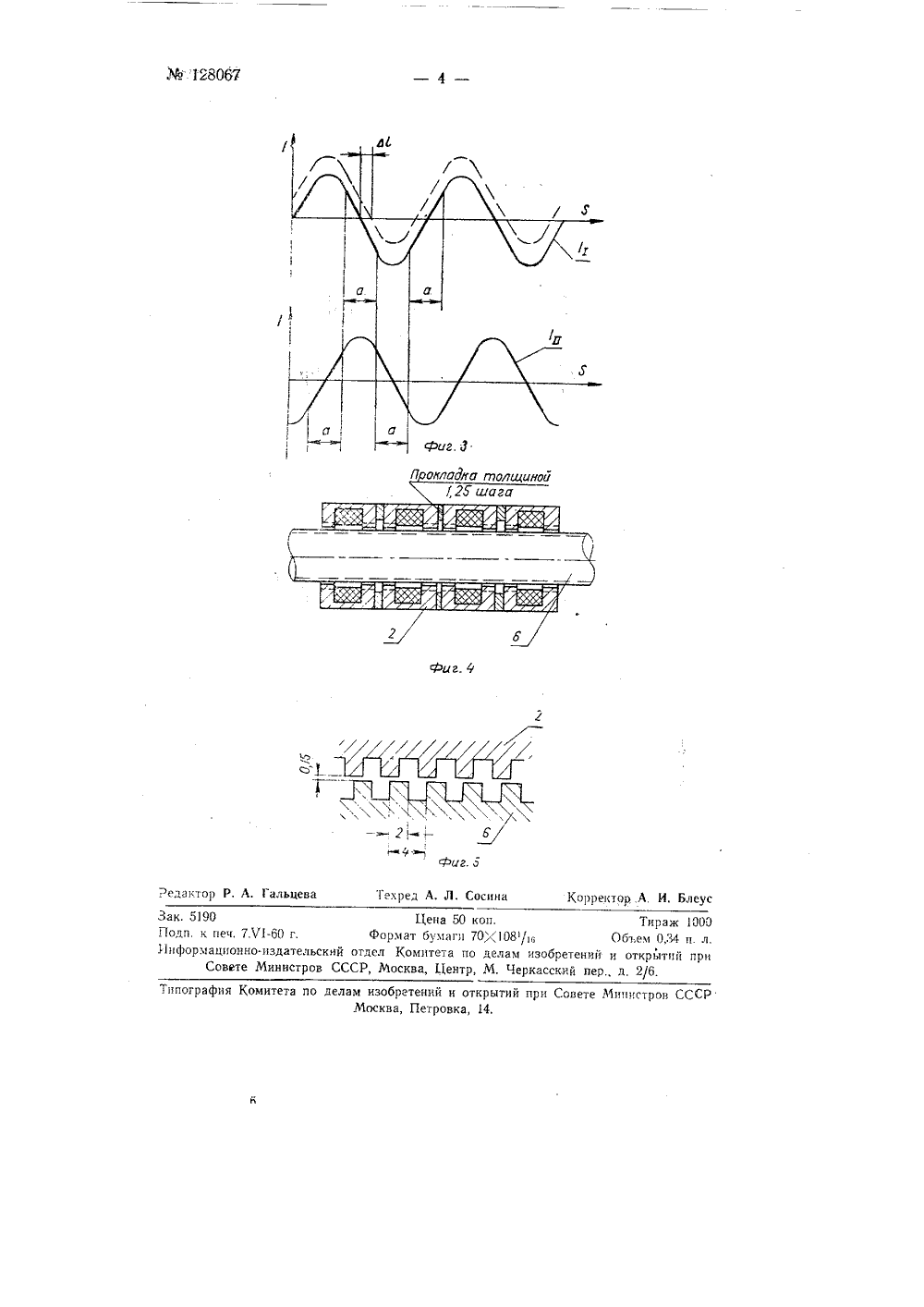
Класс 21 с, 46 оз Мо 128067 СССР САНИЕ ИЗОБРЕТЕНИЯАВТОРСКОМУ СВИДЕТЕЛЬСТВУ одансная группа М 9. Карачун, И.Г. Теннер ОГРАММНО СТЕМ ПРАВЛЕН ИЯ рта 1958 г, за Юв 594 б 70/25 воткрытий при Совете Министр Комитет по пслам обретений 1 явле в СС Опубликовано в Бюллетене изобретений Мг 9 за Системы программного управления, выполненные в виде мостовой схемы из индуктивных датчиков и набора сопротивлений, известны.Отличительная особенность описываемой системы заключается в применении сдвоенного датчика, предназначенного для разделения шага отсчетного винта на четыре измеряемых участка. Для набора размера внутри каждого из этих участков, осуществляемого со смещением начала отсчета, служит сопротивление ., включенное в одно из плеч измерительного моста,Этим достигается возможность исключения механизмов перемещения элементов магнитной системы при наборе размера внутри каждого шага отсчетного винта, а также исключения зон нечувствительности, обусловленных синусоидальной формой сигнала.На фиг, 1 и 2 изображены принципиальные электрические схемы предложенной системы; на фиг. 3 - график зависимости величины тока, текущего в диагонали схемы, от положения датчика; на фиг. 4 - схема размешения индуктивных датчиков на винте-якоре; на фиг. 5 - профиль резьбы датчика.В одном из плеч схемы описываемой системы включаются омические сопротивления 1 (фиг. 1). Прп этом ток в одном нз полудатчиков уменьшается, и нулевое равновесное состояние семы смешается на определенную величину, в зависимости от общей величины включаемого набора сопротивлений. Для восстановления равновесия схемы при асимметрировании ее сопротивлениями требуется соответствующее линейное перемещение датчика, Таким образам, включением различных сопротивлений оудут определяться (задаваться) различные величины перемещений раоочего органа, например рабочего органа станка, на котором жестко закреплен индуктивный датчик 2,Для того, чтобы иметь возможность оперировать с большими вели- чинами сопротивлений и тем самым устранить влияние сопротивленияМ 128067переходных контактов схемы управления н соединительных проводов, а также облегчить регулировку величины сопротивления, асимметрирующие сопротивления включаются через переходные трансформаторы 3 (фиг, 2).Цифрами 4 и 5 на фиг. 1 и 2 соответственно обозначены: трансформатор питания схемы и индикатор нуля.При смещении датчика вдоль оси винта, например винта станка, и диагоналки схемы течет ток, зависимость величины которого от положения датчика приведена на фит. 3.На этой фигуре приняты следующие обозначения; 5 - смещение датчика, Уг и 1 п - ток диагонали первого датчика прои включенном асимметрируюцем сопротивлении и Л/ - смещение нуля.Для целей измерения можно использовать только близкий, к прямолинейному участок а, так как на вершинах игривой чувствительность схемы (т. е. изменение тока на единицу пути при перемещении датчика) резко изменяется и падает до нуля, что не позволяет достичь необходимой точности шкалы. Поэтому для осуществления нецрерьгвной шкалы применяется пе менее двух датчиков, сдвинутых один относительно другого на часть шага. Каждый из датчиков включается в самостоятельную схему, как это изображено на фиг, 2,При движении вдоль оси винта системы, состоящей, например, из двух сдвинутых на четверть шага датчиков, ток в диагоналях их схем изменяется согласно графику фланг, 3,Г 1 ри работе шкалы прибор (микроамперметр), которым контролируется равновеаное (нулевое) состояние схемы, переключается с выхода схемы одного датчика на выход схемы другого,Таким образом, используются только бдиэкие к прямолинейному участки а. Для увеличения участка а, с целью сокращения необходимого количества переключаемых датчиков до двух и сохранения достаточной точности иткалы, профиль резьбы индуктивного датчика 2 (фиг. 4 и 5) и отсчетного винта-якоря б необходимо изготовить так, чтобы толщина витка была равной половине шага резьбы, в отличите от прмнятото в известньгх ребристых датчиках соотношений, при которых толщина витка обычно равна четверти шага резьбы.Предмет изобретенияСистема программного управления в виде мостовой схемы из индуктивньгх датчиков и набора сопротивлений, о тлич а ющ а яс я тем, что, с целью исключения механизмов, перемещения элементов магнитной системы при наборе размера внутри каждого шага и исключения зон нечувствительности, обусловленных синусоидальной формой сигнала, применен сдвоенный датчик, предназначенный для разделения шага отсчетного винта на четыре измеряемых участка, а для набора размера внутри каждого участка, осуществляемого со смещением начала отсчета, служит сопротивление, включснное в одно из плеч измерительного моста.1280 б 7 ф Редактор Р. А. Гальцева Текред А. Л. Сосина Корректор,А. И, Блеу Типография Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Петровка, 14. Зак. 5190Поди. к печ. 7 Мг.Информационно-издательскийСовете Министров СС Цена 50 коп.формат бумаги 70 108 тдел Комитета по делаь Р, Москва, Центр, М. Ч 0 изобретений и ркасский пер., Тираж 1000 ,ем 0,34 и. л. ткрытий при 2/6.
СмотретьЗаявка
594670, 13.03.1958
Бернштейн Л. М, Збарский Ю. М, Карачун Г. М, Княжицкий И. И, Приблуда Г. Я, Теннер О. Г
МПК / Метки
МПК: G05B 19/04
Метки: программного
Опубликовано: 01.01.1960
Код ссылки
<a href="https://patents.su/4-128067-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Система автоматического регулирования загрузки главной энергетической установки, шага регулируемого винта и скорости судна

Номер патента: 1505844
Опубликовано: 07.09.1989
Автор: Гилин
МПК: B63H 21/28
Метки: винта, главной, загрузки, регулируемого, скорости, судна, установки, шага, энергетической
...20, датчик 2 скорости судна включает механицеский лаг 21, механически связанный с сельсином-датчи(выдвижением рейки 10 топливного насоса 50 55 5 1 О 15 20 25 30 35 40 45 ком 22, который электрически соединен с сельсином-приемником 23. Сельсин-приемник 23 механически связан с устройством 3 сравнения скоростей, а измеритель 16 частоты вращения вала 7 двигателя 3 соединен таким же образом с всережимным регулятором 6 частоты вращения вала 7 двигателя 8.Орган 24 управления всережимного регулятора 6 механически связан с рейкой 10 топливного насоса 9 и относительно штока 18 с подпружиненным толкателем 25 программного кулачка 11. Программный кулачок имеет профильную рабочую поверхность и свободное крепление на оси,Система работает следующим...
Редукционный клапан для систем регулирования шага воздушного винта

Номер патента: 197372
Опубликовано: 01.01.1967
Авторы: Демиденко, Зеркаленков
МПК: F16K 31/163
Метки: винта, воздушного, клапан, редукционный, систем, шага
...с применением предлагаемого редукционногоклапана.Клапан состоит из корпуса 1, дифференциального плунжера 2, жесткого упора 3,термокомпенсатора 4, регулировочной шайбы5 и крышки б. Корпус соединен каналомс маслонасосом и каналом 8 - с рабочимиполостями сервомеханизма изменения шагавинта,10 Масло от маслонасоса по каналу 7 поступает к регулятору оборотов винта и к плунжеру 2 редукционного клапана. Под действием давления масла плуижер перемещается до упора 3 и вместе с ним прижимается15 к шайбе крышки 6, В таком положении плунжера открываются отверстия в корпусе, имасло проходит к маслонасосу,При повышении температуры масла еговязкость уменьшается и расход через откры 20 тые отверстия корпуса возрастает, ио тсрмокомпенсатор 4,...
Прибор для определения геометрического шага воздушного винта и для проверки его симметрии

Номер патента: 1289
Опубликовано: 15.09.1924
Автор: Гернгардт
Метки: винта, воздушного, геометрического, прибор, проверки, симметрии, шага
...положении линейка .с с прорезью. На внутренних гранях прямого угла г нанесены 2 шкалы; го-ризоцтальная и вертикальная, при чем , они построены по тому же закону, чтоц шкалы на диаграмме; горизонтальная дает диаметры исследуемого сечения, винта, а вертикальная соответствующиешаги.Для определения, а также проверки шага, испытываемый винт (фиг, 5) кладется на горизонтальную поверочнуюплиту А (она может быть и деревянная, ( но, предпочтительно, она делается чу-гунной); на плите в ее центре укрепленкружок 1, по толщине точно соответ-ствующий доске г. На кружок 1 ста-вится винт таким образов, чтобы линия, ас, проведенная по середине плиты А,служила для него осью симметрии.Перпендикулярно линии ас на доскепроведен ряд линий, через каждые 10...
Пневмогидравлический механизм для автоматического изменения шага воздушного винта и для установки его лопастей по потоку

Номер патента: 69044
Опубликовано: 01.01.1947
Автор: Бас-Дубов
МПК: B64C 11/06, B64C 11/38
Метки: винта, воздушного, изменения, лопастей, механизм, пневмогидравлический, потоку, установки, шага
...повернуть пробку крана 9 на 180. В этом случае на увеличение шага масло будет идти по магисрапи 7, каналу 14, прорезанному на наруной пове 1 хности пробки крана, трубопроводу 4, и слив - по магистрали б, каналу 15 прооки крапа и трубопроводу 5 1 ерез золотник регулятора в картер двпгатепяПри первом положении пробки крана (изоб,ке), регулятор 8 будет увеличивать шаг при уве раженном на чертеличении числа обг,Го ЯО 44 Предмет изобретения ПневмОГлр 2 Влический механизх 1 д,151 азтоматическо 0 изснеи 51 шага воздушного винта и для установки его лоастей по ютоку, о т. л и ч а ю ш, и й с я тем, что для перевода винта на режим реверса и обратно при постоянном числе его оборотов применен кра-переключа" Бь, мон ирОВяыЙ Б кор 5 се 1 еГулятор 2...
Способ корректирования погрешностей шага ходовых винтов металлорежущих станков при нарезании точных резьб

Номер патента: 91709
Опубликовано: 01.01.1951
Автор: Тимонин
МПК: B23G 3/06
Метки: винтов, корректирования, металлорежущих, нарезании, погрешностей, резьб, станков, точных, ходовых, шага
...Так как шаг ходового винта всегда колеблется в некоторых пределах, то звенья маточной гайки в различные моменты пх движения по ходовому винту оудут находиться на участках в гтках винта с шагамн азлнчЛ 91709 П рс дм(. т пзо бретни СПОСОО КО 1)Р(с 1(ТПРОВЯН//51 ГГОГР(ЕН 1 Ост(Г 1/ГсЯГс( ХОДОВЬХ В/ ИГОВ Ы- таллорежущцх станков при Гарсзанпп/ точных резьо, о тл ич я Он(и ис я тем, что, с 1(елью автоматического выравнивания отклоеиий и дви)кс ниц с 5 сипоРта стапкс( по сРавн(чНее с (РЯГ(т//с/(с(1/ми от/(гГ) 11( 11 15/м/1 Нага ходового винта, нсиользук)т н(раппом(рность отклон(ч(ии в шаге различных ниток нарезки ходового винта путем примипи составной маточной гайки, отд)ье/1( звиья котороп могут самостоятльио взаи- МОД(йетВОВатЬ С...
Предыдущий патент: Высоковольтный вакуумный выключатель
Следующий патент: Устройство для введения разности напряжений
Случайный патент: Устройство для подсчета и определенияразмеров частиц b оптически плот-ных средах