Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
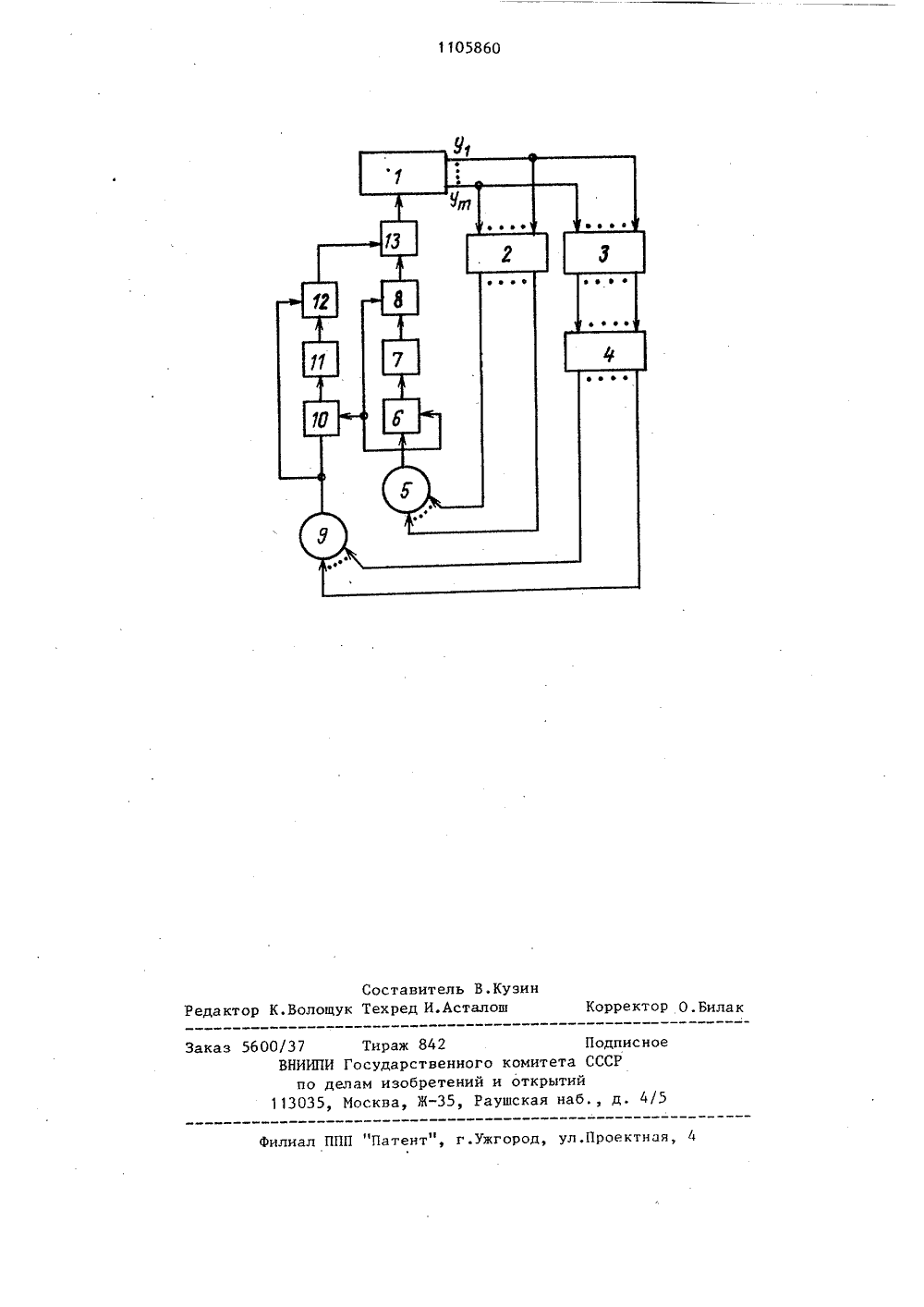
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН овЯОци 1 1 05860 з(50 С 05 В 13/02 1е ОПИСАНИЕ ИЗОБРЕТЕНИЯ ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(7 1) Фрунзенский политехнический институт(56) 1. Авторское свидетельство СССР У 378803, кл. С 05 В 13/02, 1973.2. Авторское свидетельство СССР по заявке У 3398459/24,кл. С 05 В 13/02, 1982.(54) (57) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая первый блок задания коэффициентов, последовательно соединенные первый блок суммирования, первый умножитель, первый интег-. ратор, второй умножитель, выходы объ екта регулирования соединены с соответствующими входами первого блока задания коэффициентов, входы первого блока суммирования соединены с соответствующими выходами первого блока задания коэффициентов, выход первого блока суммирования подключен ко вторым входам первого и второго умножителей, о т л и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей системы, в нее введены блок запаздывания, второй блок задания коэффициентов, последовательно соединенные второй блок суммирования, третий умножитель, второй интегратор, четвертый умножитель, третий блок суммирования, выходы объекта регулирования соединены с соответствующими входами блока запаздывания, выходы которого подключены к соответствующим входам второго блока задания коэффициенО тов, соединенного выходами с соответ-ствующими входами второго блока суммирования, выход которого подключен ко второму входу четвертого умножителя, выход первого блока суМмирования соединен с вторым входом третьего умно- ЫЪЮ жителя, второй вход и выход третьего блока суммирования подключены соответ-, ффффф ственно к выходу второго умножителя ффффф и входу объекта регулирования. Ю60 1 11058Изобретение относится к технической кибернетике и может быть использовано в системах регулирования объек- у тами с запаздыванием по состоянию, прИчем параметры объекта - неизвест ные постоянные или медленно меняющиеся во времени величины. Такими системами являются, например, системы автоматического управления летательными, аппаратами, ядерными реакторами, гид ромелиоративными сооружениями.и т.д.Известно устройство для автомати;ческого управления объектами при наличий случайных возмущений, содержащее задающее устройство, узел сравнения, 15 .объект регулирования, блок коммутируемых коэффициентов, сумматор, дифференцирующее звено, блок умножения, квадратор, блок выделения знака, выход задающего устройства связан с 20 входом узла сравнения, второй вход которого соединен с выходом объекта регулирования, вход которого подключен к выходу блока коммутируемых коэффициентов один вход которого25Усвязан с выходом узла сравнения, а другой вход соединен с выходом сумматора, один вход которого подключен к выходу дифференцирующего звена, а другой вход связан с выходом блока 30 умножения, один вход которого соединен с выходом квадратора, а второй вход подключен к выходу блока выделения знака, выход узла сравнения свяЗаи с входом дифференцирующего звена,З 5 входом квадратора, входом блока выделения знака 13. Недостатками данного устройства являются малая точность в работе, ограниченные функциональные возможнос ти, так как устройство может работать только с объектами, порядок которых не превышает второго, и не может работать с объектами, обладающими запаздыванием.Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления, содержащая блок задания коэффициентов, последовательно соединенные блок 50 суммирования, первый умножитель, интегратор, второй умножитель, объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, входы 55 блока суммирования подключены к соответствующим выходам блока задания коэффициентов, выход блокасуммирования подключен ко вторым входам первого и второго умножителей 1 2 .Недостатком этач системы являются узкие функциональные возможности, так как система не может работать с объектами, обладающими запаздыванием.Цель изобретения - расширение функциональных возможностей системы.Поставленная цель достигается тем, что в систему, содержащую первый блок задания коэффициентов, последовательно соединенные первый блок суммирования, первый умножитель, первый интегратор, второй умножитель, выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов, входы первого блока суммирования подключены к соответствующим выходам первого блока задания коэффициентов, выход первого блока суммирования подключен ко вторым входам первого и второго умножителей, дополнительно введены блок запаздывания, второй блок задания коэффициентов, последовательно соединенные второй блок суммирования, третий умножитель, .второй интегратор, четвертый умножитель, третий блок суммирования, выходы объекта регулирования соединены с соответствующими входами блока запаздывания, выходы которого .связаны с соответствующими входами второго блока задания коэффициентов, соединенного выходами с соответствующими входами второго блока суммирования, выход которого подключен ко второму входу четвертого ум" ножителя, выход первого блока суммирования соединен с вторым входом третьего умножителя, второй вход и выход третьего блока суммирования подключен соответственно к выходу второго умно- жителя и входу объекта регулирования. Вводя в систему блок запаздывания, второй блок задания коэффициентов, второй блок суммирования, третий умножитель, второй интегратор, четвертый умножитель, третий блок суммирования, получают в системе новую функцию, которая заключается в том, что теперь управляющее воздействие Формируется ие только на основе информации о состоянии объекта в данный момент времени, но и на основе информации о состоянии объекта, полученной ранее на время, равное времени запаздывания, что является необходимым условиемпри управлении объектами, обладающими запаздыванием.На чертеже представлена блок-схема предлагаемой системы.Система содержит объект регулирования 1, первый блок 2 задания коэффициентов, блок 3 запаздывания, второй блок 4 задания коэффициентов, первый блок 5 суммирования, первый умножитель 6, первый интегратор 7, второй умножитель 8, второй блок 9 суммирования,третий блок 10 суммирования, второй интегратор 11, четвертый умно- житель 12, третий блок 13 суммирования. Выходы объекта регулирования 1 связаны с соответствующими входами первого блока 2 задания коэффициентов и соответствующими входами блока 3 запаздывания, выходы первого блока 220 задания коэффициентов подключены к соответствующим входам первого блока 5 суммирования, выход которого соединен с первым и вторым входом первогоумножителя 6, входом второго умножителя 8, входом третьего умножителя 10, выход первого умножителя 6 связан с входом первого интегратора 7, выход которого подключен ко второму входу второго умножителя 8, выходы блока30 3 запаздывания соединены с соответствующими входами второго блока 4 зада" ния коэффициентов, выходы которого . связаны с соответствующими входами второго блока 9 суммирования, выход которого подключен ко второму входу З 5 третьего умножителя 10 ик входу четвертого умножителя 12, выход третьего умножителя 10 соединен с входом второго интегратора 11, выход которого связан с вторым входом четвертого умножителя 12, выход которого подключен ко входу третьего блока 13 суммирования, второй вход которого связан с выходом второго умножителя 8, а выход подключен ко входу объекта регу 45 лирования 1. Система функционирует следующим образом,Сигналы с выходов объекта регулирования 1 поступают одновременно на соответствующие входы первого блока 2. задания коэффициентов и блока 3 запаздывания. Блок 2 задания коэффициентов представляет собой блок умно- жителей, в этом блоке происходит умножение сигнала с выхода объекта регулирования 1 на постоянный коэффициент, Сигналы с выходов блока 2 задания коэффициентов поступают насоответствующие входы первого блока5 суммирования, гле складываются.Сигнал с выхода блока 5 суммированияприходит на вход второго умножителя8, на вход третьего умножителя 10 и на оба входа первого умножителя 6. В первом умножителе 6 происходит умножение сигнала с выхода первого блока 5 суммирования на этот же сиг нал. Сигнал с выхода умиожителя 6 поступает на вход первого интегратора 7, где интегрируется, а с выхода интегратора 7 - на второй вход второго умножителя 8, Во втором умножителе 8 происходит умножение сигнала с выхода интегратора 7 на сигнал с выхода первого блока 5 суммирования. Сигналы с выходов блока 3 запаздывания через время, равное времени запаздывания, поступают на соответотву ющие входы второго блока 4 задания коэффициентов, где происходит умножение сигнала с 1-го выхода блока 3 запаздывания на постоянный коэффици- ент. Сигналы с выходов второго блока 4 задания коэффициентов поступают на соответствующие входы второго блока 9 суммирования, где складываются. Сигнал с выхода второго блока 9 суммирования поступает на вход четвертого умножителя 12 и на вход третьего . умножителя 10. В третьем умножителе 10 происходит умножение сигнала с выхода первого блока 5 суммирования на сигнал с выхода второго блока 9 суммирования. Сигнал с выхода третьего умножителя поступает на вход второго интегратора 11, где интегрируется. Сигнал с выхода второго интегратора 11 поступает на второй вход чет" вертого умножителя 12, где происходит умножение сигнала с выхода второго интегратора 11 на сигнал с выхода второго блока суммированияСигнал с выхода четвертого умножителя 12 поступает на второй вход третьего блока 13 суммирования, где складывается с сигналом, поступающим на первый вход блока 13 суммирования с выхода второго умножнтеля 8, Сигнал с выхода третьего блока 13 суммирования, явля ющийся сигналом управления, поступает на вход объекта регулирования 1. Предлагаемая система обладает бо"лее широкими функциональными возмож -ностями, так как может работать и собъектами, обладающими запаздыванием.ИПИ Государственного комитета делам изобретений и открытии 5, Москва, Ж, Раушская наб 5 лиал ППП "Патент", г.ужгород, ул.Проектная Составитель В.Кузинедактор К.Волощук Техред И.Асталош Корректс
СмотретьЗаявка
3495080, 29.09.1982
ФРУНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ЕРЕМИН ЕВГЕНИЙ ЛЕОНИДОВИЧ, КРЫВЧАК АЛЕКСАНДР ПАВЛОВИЧ, ЦЫКУНОВ АЛЕКСАНДР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.07.1984
Код ссылки
<a href="https://patents.su/4-1105860-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для разделения муки на первый и второй сорта из потоков ее поступающих с вальцевых мукомольных станков и рассевов

Номер патента: 515528
Опубликовано: 30.05.1976
Автор: Попков
МПК: B02C 25/00
Метки: вальцевых, второй, муки, мукомольных, первый, поступающих, потоков, разделения, рассевов, сорта, станков
...белизны муки первого сорта не корректируется системой подстройки при помощи регулятора 17. Если текущее значениебелизны муки первого сорта равно .заданному, то регулятор 18 не работает, а средневзвешенная белизна потоков муки соответствует заданной. Регулирование зазоров вальцовых станков исполнительными механизмами 13 не осуществляется. Потоки продукта 5 10 15 20 25 30 35 40 45 50 55 60 65 систем вальцовый станок - рассев, в которых имеется возможность регулирования зазора, поступают в первый сорт муки,В сличае, если текущее значение белизнымуки второго сорта (в ед, ДКБ) меньше установленного заданного, т. е, мука темнее, чемзадано, уставка желаемого значения белизнымуки первого сорта корректируется системойподстроики...
Установка для определения модулей упругости первого и второго рода образцов жаропрочных металлов и сплавов

Номер патента: 114964
Опубликовано: 01.01.1958
МПК: G01N 19/00, G01N 3/18
Метки: второго, жаропрочных, металлов, модулей, образцов, первого, рода, сплавов, упругости
...печи 4 олый шток 5, соединяющи114964траверсу с электродинамическим вибратором б, изготовлены из жаропрочного сплава (фиг. 1),Преобразование механических колебаний испытуемого образца в электрические колебания с равной частотой может быть осуществлено применением любой из известных схем включения дифференциальных емкостных датчиков (фиг. 2) .В одном случае выходное напряжение генераторов может быть подано на смесительный каскад, на выходе которого может быть получено напряжение разностной частоты генераторов. Девиация частоты разностного напряжения будет происходить с частотой, равной частоте колебаний образца. Подав это напряжение на частотный детектор, получаем на выходе последнего напряжение низкой частоты, равной частоте колебаний...
Делитель частоты следования импульсов с дробным коэффициентом деления

Номер патента: 1529451
Опубликовано: 15.12.1989
Автор: Кнопф
МПК: H03K 23/66
Метки: деления, делитель, дробным, импульсов, коэффициентом, следования, частоты
...суммирования - Я+В, +В =8, Когдаьвозникнет условие Б 7 И -1, то сумма кодов Я и Вдвызовет переполнениепервого блока 16 суммирования и на его выходе сформируется код, равныйьБ-В , а на выходе переноса сумматора 4 появится активный уровень. Сумма кодов, поступаницих на входы второго блока 17 суммирования, будет равна Б-В +Вд,+И ", а значит, на его выходе сформируется код, равный 8-В", что соответствует алгоритму работы сумматора 4, В случае задания коэффициента деления в двоичной системе счисления сумматор 4 представляет собой обычный сумматор с емкостью В -1.За время, равное С,, колиВчество импульсов, поступившее на вход счетчика 10,будет равно ИН СсВ В"СВ этом выражении величины ш и -В являются целой и дробной соответственно частями...
Способ производства готовых к употребле1ю первых и вторых обеденных блюд

Номер патента: 318386
Опубликовано: 01.01.1971
Авторы: Всесоюзный, Ершова, Ефимов, Котович, Кузнецова, Мииеев, Овощесушильиой, Пупынина
МПК: A23B 7/005, A23L 1/40
Метки: блюд, вторых, готовых, обеденных, первых, производства, употребле1ю
...компонентами, подвергая всю массу термической обработке при температуре 85 - 90 С под вакуумом. В подготовленную смесь при тщательном перемешивании вводят готовый бе лый соус, который соединяет имеющиеся тонкоизмельченные частицы с жидкой фазой.Однородную смесь борща быстро расфасовывают на тубонаполнительной машине в алюминиевые тубы.10 Наполненные и герметически закупоренныетубы направляют на стерилизацию в авто.клавы,Полученная готовая консервная продукция15 представляет собой однородную, нерасслаивающуюся массу, пригодную одновременно дляее разжевывания, что особенно важно при питании в условиях невесомости.С целью получения однородной, нерасслаи 20 вающейся смеси с мелкоизмельченными частицами составных компонентов по...
Способ лечения синдактилии первого и второго пальцев кисти

Номер патента: 1091913
Опубликовано: 15.05.1984
Автор: Михневич
МПК: A61B 17/00
Метки: второго, кисти, лечения, пальцев, первого, синдактилии
...по гребнюмежпальцевой складки к первому пальцу и продолжают по его ладонно-локтевой понерхности до пястно-Фалангового сустава, Формируя при этомдва треугольных лоскута, основаниепервого из которых обращено к тылупервого пальца, а основание второгок ладонной поверхности второго пальца, затем перным треугольным лоскутом закрывают раненую поверхностьперного пальца, вторым - второгопальца, трапециевидный лоскут располагают межцу ними, формируя межпальцевую складку, а дефект кожи натыльной поверхности Второго пальцазакрывают свобОдным кожным трансплантатом.Спо.об осуществляется следующимобраэампПроизводя разрез кажи, подкожна жирОвой клетчатки и поверхностейФасции ат средней трети тыа второйпястной кости и ведут его н дистальнам направлении...
Предыдущий патент: Импульсный регулятор
Следующий патент: Система экстремального регулирования
Случайный патент: Способ производства полиуретановых волокон