Система двухкоординатного программногоуправления c коррекцией программы
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
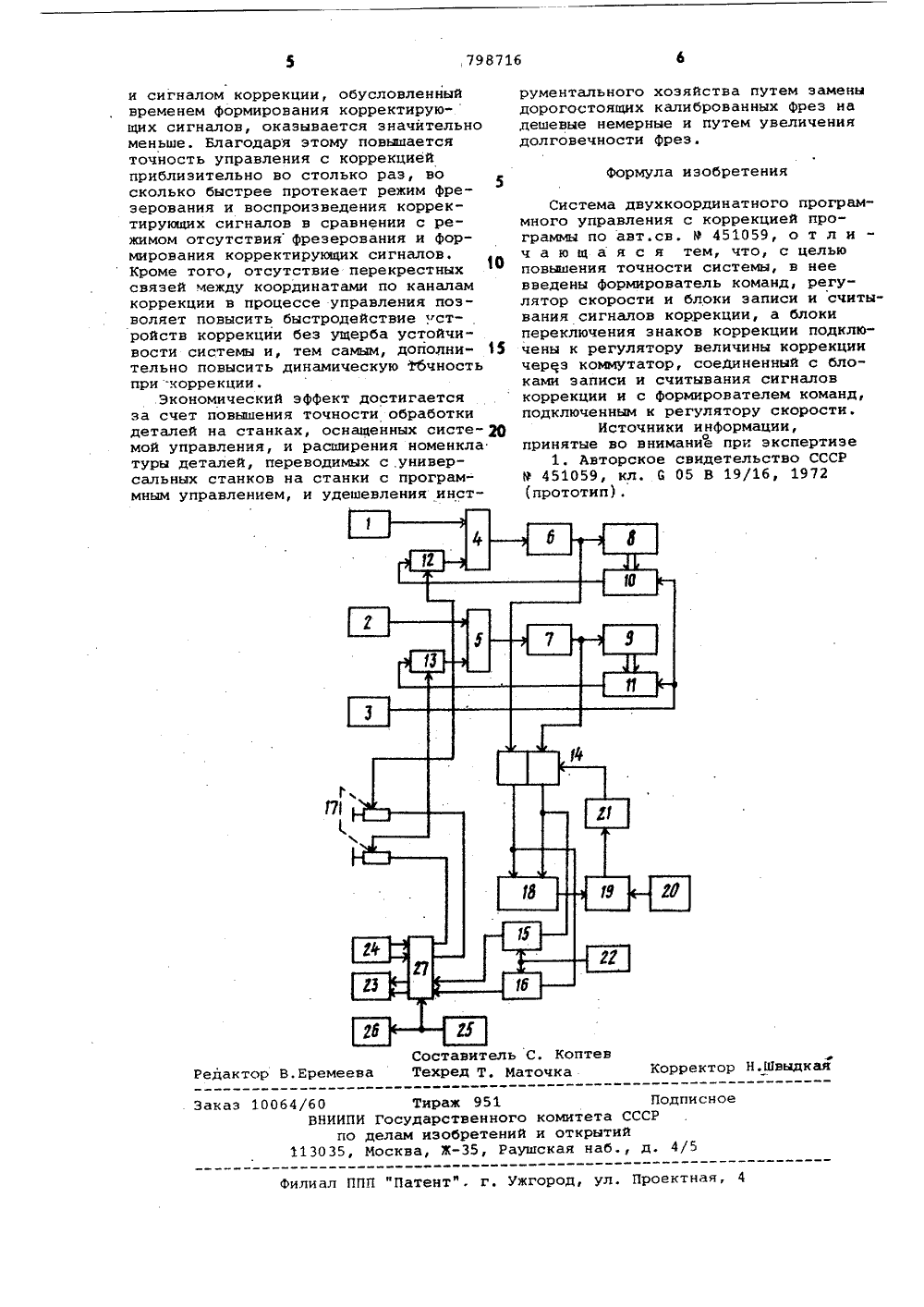
и АН"и Своз СоветскихСоциалистическихРеспублик ОПИС 4 Е ИЗОБРЕТЕНИЯ щ 798716 К АВТОРСКОМУ СВИ ЕТЕЛЬСТВУ(61) Дополнительное к авт, сеид-ву р 4510.59 Р 1)М, Кл,(22) Заявлено 190379 (21) 2739380/18-24 6 05 В 19/16 с присоединением заявки Но -Государствеииыя комитет СССР по делам изобретеиий и открытий.(23) Приоритет Опубликовано 23,0181. Бюллетень М 3 Дата опубликования описания 230181(54) СИСТЕМА ДВУХКООРДИНАТНОГО ПРОГРАММНОГО УПРАВЛЕНИЯ С КОРРЕКЦИЕЙ ПРОГРАММЫ Изобретение относится к автоматике и вычислительной технике, вчастности к системам программногоуправления с записью программы намагнитную ленту.По основному авт.св. 9 451059,известна система двухкоординатногопрограммного управления с коррекциейпрограммы, содержащая блок считывания технологической информации, блоксчитыванияопорного сигнала и покаждой координате последовательносоединенные блок считывания управляющей информации, детектор отклонения, блок управленияприводом, 15привод, датчик обратной связи, подключенный к блоку считывания опорногосигнала, блок ввода коррекции, подключенный к детектору отклонения, регулятор величины коррекции, последовательно соединенные задатчик эталонного сигьала, блок сравнения, блокобратной связи, двухканальный блокмасштабирования, блок геометричес"кого сложения, подключенный к блокусравнения, и по каждой координатеблоки переключения знаков коррекции,подключенные к блоку считываниятехнологической информации, причемблоки управления приводами по каждой ЗО координате через последовательно соединенные двухканальный блок масштабирования, блоки переключения знаков коррекции и регулятор величины коррекции подключены к блокам ввода коррекции другой координаты 1.Недостаток системы - низкая динамическая точность коррекции программы, обусловленная значительным временным сдвигом между сигналами управляющей информации, поступающими с выходов блоков считывания управляющей информации на входы детекторов отклонения, и сигналами корректирующей инФормации, поступающими с выходов регулятора величины коррекции через блок ввода в цепях коррекции за период времени Формирования корректирующих сигналов.Цель изобретения - повышение точности системы.Поставленная цель достигается тем что в систему введены формирователь команд, регулятор скорости и блоки записи и считывания сигналов коррекции, а блоки переключения знаков коррекции подключены к регулятору величины коррекции через коммутатор, соединенный с блоками записи и считывания сигналов коррекции и с фооми 798716рователем команд, подключенным к регулятору скорости.На чертеже представлена блоксхема системЬ.Система содержит блоки 1 и 2 считывания управляющей информации и блок 3 опорного сигнала, детекторы 4 и 5 отклонения, блоки 6 и 7 управления приводом, приводы 8 и 9, датчики 10 1 и 11 обратной связи, блоки 12 и 13 ввода коррекции, двухканальныйблок 1 О 14 масштабирования, блоки 15 и 16 переключения знаков коррекции, регу,лятор 17 величины коррекции, блок 18 геометрического сложения, блок 19 сравнения, эадатчик 20 эталонного ,сигнала, блок 21 обратной связи,блок 22 считывания технологической информации, блок 23 записи сигналов коррекции, блок 24 считывания сигналов коррекции, формирователь 25 команд, регулятор 26 скорости и коммутатор 27. 20Система работает в двух режимах в режиме отсутствия фрезерования, Формирования и записи корректирующих сигналов и в режиме фрезерования и воспроизведения корректирующих 25 сигналов.Переключение режимов работы системы выполняется Формирователем 25. по команде, поступающей на регулятор 26 и на коммутатор 27. 30В режиме отсутствия Фрезерования и формирования корректирующих сигналов система работает следующим образом.Команда с выхода формирователя 25 включает регулятор 26 на малую скорость, через коммутатор 27 подключает выходы блоков 15 и 16 ко входам блока 23 и отключает выходы блока 24 от регулятора 17.Сигнал с магнитной ленты поступает на блоки 1-3, выхОдные сигналы кото рых поступают, соответственно, на детекторы 4 и 5, а опорный сигнал через датчики 10 и 11 и блоки 12 и 13 - на вторые входы детекторов 4 и 5. При совпадении управляющих и 45 опорных сигналов, т.е. при отсутствии перемещений по программе, сигнал с выходов детекторов 4 и 5 равен нулю. С выходов блоков 6 и 7 в этом случае также нет сигналов, и приводы щ не перемещаются.При появлении сдвига фаз в какойлйбо из координат по отношению к опор ному сигналу на выходе детектора отклонения соответствующей координаты; появляется сигнал, пропорциональный этому сдвигу Фаз, и блок управления приводом соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы управляющий и опорный сигналы ФО на входах детектора отклонения были равны.При наличии перемещений по координатам сигналы с блоков 6 и 7 посту пают также на входы блока 14, с вы ходов которого они поступают на входы блока 18, направляющего сигнал на блок 19, где производится его сравнение с сигналом задатчика 20. Сигнал отклонения с выхода блока 19 через блок 21 устанавливает выходную величину блока 14, равную эталонному сигналу. Величина эталонного сигнала выбирается такой, чтобы обеспечить максимальную величину коррекции.С выходов блока 14 сигналы поступают через блоки 15 и 16 и коммутатор 37 на блок 23.В режиме фрезерования и воспроизведения корректирующих сигналов система работает следующим образом.Команда с формирователя 25 переключает регулятор 26 на большую скорость, через коммутатор 27 отключает выходы блоков 15 и 16 от входов блока 23 и подключает выходы блока 24 к регулятору 17.Сигнал с магнитной ленты поступает на блоки 1,2,3 и 24, выходные сигналы которых поступают, соответственно, на детекторы 4 и 5. Причем сигнал с выхода блока 24 поступает на детекторы .4 и 5 через регулятор 17,где он умножается на определенную величину и принимает значение корректирующего сигнала, и блоки 12 и 13, где он преобразуется в пропорциональный сдвиг фаэ по отношению к опорному сигналу, а сигнал с блока 3 поступает на детекторы 4 и 5 через датчики 10 и 11, где они приобретают сдвиг Фаз по отношению к опорному сигналу, пропорциональный положению привода, и через блоки 12 и 13, где суммируются эти сдвиги фаз.Припоявлении сдвига фаз в какой- либо из координат по отношению к опор ному сигналу на выходе детектора отклонения соответствующей координаты появляется сигнал, пропорциональный этому сдвигу фаз, и блок управления приводом соответствующей координаты начинает перемещать привод, связанный с датчиком, в таком направлении, чтобы сигналы на входах детектора отклонений были равны. В результате, привод перемещается на величину запрограммированного перемещения, если сдвиг фаз относительно опорного сигнала появляется в управляющем сигнале, н на величину коррекции, если сдвиг фаэ относительно опорного сигнала появил ся в результате изменения величины коррекции по данной координатеТак как режим фрезерования и воспроизведения корректирующих сигналов. протекает быстрее, чем режим отсутствия фрезерования н формирования корректирующих сигналов иэ-за разной скорости движения магнитной ленты, то при фрезеровании временной сдвиг между управляющим сигналом, 798716 Формула изобретения Составитель С. Копте.Еремеева Техред Т, Маточка р Н,Швыдкая о акт Тираж 951Государственногоелам изобретенийосква, 3-35, Рауш аз 10064/60 ВНИИП по 113035, дписное омитета СССР открытий хая наб., д. 4/ Филиал ППП "Патентф, г. Ужгород, ул. Проектная,и сигналом коррекции, обусловленныйвременем формирования корректирующих сигналов, оказывается значительноменьше. Благодаря этому повышаетсяточность управления с коррекциейприблизительно во столько раз, восколько быстрее протекает режим фреэерования и воспроизведения корректирующих сигналов в сравнении с режимом отсутствия фрезерования и формирования корректирующих сигналов,Кроме того, отсутствие перекрестныхсвязей между координатами по каналамкоррекции в процессе управления позволяет повысить быстродействие устройств коррекции без ущерба устойчн"вости системы и, тем самым, дополнительно повысить динамическую бчностьпри .коррекции,Экономический эффект достигаетсяза счет повышения точности обработкидеталей на станках, оснащенных систе Омой управления, и расширения номенклатуры деталей, переводимых с,универсальных станков на станки с программным управлением, и удешевления инструментального хозяйства путем заменыдорогостоящих калиброванных фрез иадешевые немерные и путем увеличениядолговечности фрез. Система двухкоординатного программного управления с коррекцией программы по авт.св. 9 451059, о т л и ч а ю щ а я с я тем, что, с целью повыаения точности системы, в нее введены формирователь команд, регулятор скорости и блоки записи и считывания сигналов коррекции, а блоки переключения знаков коррекции подключены к регулятору величины коррекции через коммутатор, соединенный с блоками за иси и считывания сигналов коррекции и с формирователем команд, подключенным к регулятору скорости.Источники информацииопринятые во внимание при экспертизе1. Авторское свидетельство СССР М 451059, кл. С 05 В 19/16, 1972 (прототип).
СмотретьЗаявка
2739380, 19.03.1979
ПРЕДПРИЯТИЕ ПЯ Г-4086
ЛОНШАКОВ ВЛАДИМИР ПЕТРОВИЧ, СПИЦЫН ВЛАДИМИР НИКОЛАЕВИЧ, ФАРАФОНОВ АЛЕКСЕЙ АФАНАСЬЕВИЧ
МПК / Метки
МПК: G05B 19/16
Метки: двухкоординатного, коррекцией, программногоуправления, программы
Опубликовано: 23.01.1981
Код ссылки
<a href="https://patents.su/3-798716-sistema-dvukhkoordinatnogo-programmnogoupravleniya-c-korrekciejj-programmy.html" target="_blank" rel="follow" title="База патентов СССР">Система двухкоординатного программногоуправления c коррекцией программы</a>
Устройство для записи тестовых сигналов в блоки магнитной памяти

Номер патента: 1259341
Опубликовано: 23.09.1986
Авторы: Виленчик, Вичес, Мучиев
МПК: G11C 29/00
Метки: блоки, записи, магнитной, памяти, сигналов, тестовых
...второй - формирование контрольных сигналов,Управление этапами работы осуществляется Формирователями 12 и 13 и триггером 3. В момент окончания Формирования синхросигналов или по достижении максимального значения счетчиком 5 Формирователь 13 вырабатывает управляющий импульс конец первого этапа цикла) который постуг.яет на вход счетчика 5 приводя его ь начальное состояние (на выходах Образуется двоичная комбинация, равпяя разности между максимальным значением счета счетчика 5 и длитель ностью синхросигнала), а также - на вход сброса триггера 3, изменяя его состояние. Нри этом на инверсном выходе триггера 3 образуется высокий потенциал поступающий на вход счет"1 икязяпрещяя егО работу(0 3. 45 50 5 со 15 2 11 25 На прямом выходе...
Устройство для коррекции фазы цифровых сигналов записи и считывания
Номер патента: 644408
Опубликовано: 25.01.1979
Автор: Андре
МПК: H04L 7/02
Метки: записи, коррекции, сигналов, считывания, фазы, цифровых
...одногобинарного элемента и, таким образом, выход из осйовного состояния. Сигнал Е стирация длительности одного тактового импульса, вызывающий выход из основного состояния, вводится через элемент НЕ - И 7.В блок уплотнения 3, кроме того, поступает сигнал разрешения опознаванияЛЛ, формируемый во время выработки сеткис помощью импульса сетки в промежутоквремени, предназначенный для бинарногоэлемента опознавания. В блоке уплотнения3 запоминается сигнал С и восстанавливается сигнал Г, когда в запоминающееустройство поступает сигцал А.Сдвиг фаз между тактовыми сигналамизаписи НРЗ и считывания НР 1., достаточендля осуществления грубого детектированияи тем более, точного детектирования. Сигнал ., поступающий из счетчика 4, представляет...
Устройство для формирования корректирующего сигнала телевизионного датчика

Номер патента: 1125772
Опубликовано: 23.11.1984
Авторы: Бычков, Калинин, Кузнецов, Тимофеев
МПК: H04N 5/14
Метки: датчика, корректирующего, сигнала, телевизионного, формирования
...фазой 772 4и управления модулем соответственно,которые являются управляемыми входами предлагаемого устройства.Устройство работает следующим образом,Тактирующие импульсы, синхронные с разверткой ТВ датчика 11, поступают с первого выхода синхронизатора 3 на вход блока 4 адресации. Блок 4 адресации формирует синхронно изменяющийся с поступлением тактирующих импульсов адресный сигнал в виде двоичного кода, который подается на вход блока 5 памяти текущих значений составляющих корректирующего сигнала для управления считыванием информации с его ячеек. В ячейках блока 5 записаны в виде К-разрядного двоичного кода текущие отсчеты для каждой иэ М составляющих корректирующего сигнала в опорных точках, равномерно расположенных по площади ТВ...
Устройство для регулирования процесса кристаллизации из растворов

Номер патента: 929140
Опубликовано: 23.05.1982
МПК: B01D 9/02
Метки: кристаллизации, процесса, растворов
...сравнения соединен с выходом второго блока 11 задания; первый блок12 коррекции, вход которого соединен с датчиком 13 концентрации исходного раствора, а выход - с входом второго блока 11 задания; второй блок 14 коррекции, вход которого соединен с выходом второго элемента 8 сравнения, а выход - с входом первого блока 6 задания,Устройство работает следующимобразом. 4Расход исходного раствора, поступающего в кристаллизатор 1, .измеряют датчиком 2, Текущее значение расхода сравнивают на первом эле. менте 3 сравнения с заданным, поступающим с первого блока 6 задания. В зависимости от отклонения текущего значения расхода от заданного, первый регулятор 4 вырабатывает управляющий сигнал на первый клапан 5.Плотность сгущенной суспензии...
Устройство статистического уплотнения каналов связи с дисперсией несущих

Номер патента: 1307597
Опубликовано: 30.04.1987
МПК: H04J 7/00
Метки: дисперсией, каналов, несущих, связи, статистического, уплотнения
...устройствам передачи сигналов методом частотной модуляции, содержащим генератор дисперсии несущега колебания.Цель изобретения - увеличение количества передаваемой информации паканалу связи.На чертеже приведена функциональная электрическая схема предлагаемогоустройства,Устройство содержит сумматор 1,управляемый аттенюатар 2, генератор 3сигнала дисперсии, блок 4 формирования напряжения АРУ, амплитудный детектор 5, фильтр 6 нижних частот, пороговый блок 7 и блок 8 накоплениядополнительной информации.Устройство работает следующим образом,К входу сумматора 1, на которыйпоступает сигнал основной информации,подключены соединенные последовательно амплитудный детектор 5, фильтр 6и пороговый блок 7. На вход порогового блока 7 подается опорное...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство для программного управлениястанком
Случайный патент: Устройство электроснабжения железных дорог переменного тока