Контурная система программного управления многокоординатным манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 740491
Авторы: Бирюков, Жалнерович, Зайцев, Петровский



Текст
Оп ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскнхСоцмалистнческихРесттубпик ц 740491(088.8) но делам нзебретеннй н атнрмтнй(54) КОНТУРНАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МНОГОКООРДИНАТНЫМ МАНИПУЛЯТОРОМИзобретение относится к области автоматики и вычислительной техники и может быть использовано при создании систем числового программного управления многокоординатными маиипу 5 ляторами различного назначения.Известна система программного управления многокоординатным манипулятором содержащая блок управления, интерполятор, датчики перемещений, блок управления скоростями приводов и приводы, предназначенная для станков с числовым программным управлением по специально подготовленным программам Ц. Однако она не может быть использована для ,целей создания обучающихся систем программного управления.Наиболее близкой к данному изобретению является система 2, содержащая блок обратной связи, выход которого непосредственно и через блок контра ля обработки программы соединен соответственно с первым и вторым входами блока управления, первый выход и третий 2вход которого соединены с блоком памяти, а второй выход - со вторым входом блока контроля обработки программы и с первым входом интерполятора, второй аход которого соединен с ввтходом генератора тактовых импульсов, а выходы - со входами приводов.Недостатками такой системы являются низкие скорости линейных и угловых перемещений, невозможность регулирования скорости обработки программы и программирования аналитическим путем.Белью изобретения является расширение области применения системы.Это достигается тем, что система содержит блок подготовки и коррекции программы н последовательно соединенные эадатчик временного интервала, формирователь временного интервала и формирователь сигнала записи,второй вход которого подключен к выходу блока обратной связи, а выход к четвертому входу яака управления и второму входу формирователя временного интервала, третий55 вход которого соединен с выходом генератора тактовых импульсов, третий вы,ход блока управления через блок подготовки и коррекции программы подключен к пятому своему входу, а шестой вход блока управления соединен с выходом формироватепя временного интервала.На чертеже представлена функциональная схема контурной системы программного управления многокоординатным манипулятором, на которой указаны блок 1 контроля отработки программы, блок памяти 2, генератор 3 тактовых импульсов, блок 4 обратной связи, блок 5 управления, интерполятор 6, приводы 7, задатчик 8 временного интервала, формирователь 9 временного интервала, формирователь 10 сигналов записи, блок 11 подготовки и коррекции программ.Система работает следующим образом.Работа контурной системы программного управления многокоординатным манипулятором основана на принципе програм мирования отдельных точек контура с дальнейшей отработкой данных аппроксимированных отрезков интерполятором 6.Режим обучения проводится путем обвода исполнительного органа манипулятора по необходимому . контуру движения с требуемой скоростью, В процессе движения через определенные временные промежутки снимаются и записываются в блок памяти 2 текущие координаты точек по всем степеням подвижности, которые и характеризуют контур движения.В режиме обучения с задатчика 8 временного интервала выбранная величина временного интервала записывается в формирователь 9 временного интервала, в котором происходит подсчет импульсов, поступающих с генератора 3 тактовых импульсов, и формируются сигналы в конце каждого временного интервала. Эти сигналы поступают в формирователь 10 сигналов записи, куда также поступает информация о перемещении исполнительного органа манипулятора с блока 4 обратной связи по координатам. В формирователе 10 сигналов записи происходит сравнение приращений координат за текущий интервал времени; с предыдущим и при равенстве приращений происходит обобщение движения в двух, трех и т,д. интервалах времени. Обобщение происходит до тех пор, пока неравенство приращений по одной из координат не составит величины, превышающей процент необходимой точности поддержания пос 10 15 20 25 30 35 40 45 50 тоянной контурной скорости в системе,после чего формируется сигнал записи,По этому сигналу происходит запись вблок памяти 2 информации о перемещении, поступающей с блока 4 обратнойсвязи по координатам, и информации овеличине временного интервала, за который было произведено это перемещение,поступающей с формирователя 9 временного интервала,Кроме того, в формирователе 10сигналов записи происходит оценка изменения знака перемещения и при появлении по одной из координат импульсовпротивоположного знака в количестве,превышающем требование к точностиаппроксимации для системы, сразу же,ке ожидая конца временного интервала,происходит формирование сигнала записи, по которому информация о перемещении и величине временного интервалазаписывается в блок памяти 2, а в формирователе временного интервала формируется следующий временной интервал.Далее запись программы происходит аналогичным образом до конца обвода оператором всего контура движений исполнительным механизмом робота, В блоке 11 подготовки и коррекции программпроизводится минимизация программы,а также, в режиме программирования,подготовка программы по рассчитаннымконтурам с учетом необходимой скорости перемещения. Затем производитсязапись программы отработки в блок памяти 2. В режиме воспроизведения записанной программы из блока памяти2 информацию о перемещении и величине временного интервала записывают винтерполятор 6.В интерполяторе 6 происходит интерполяция величины перемещения по координатам, записанной в блоке памяти 2,до полной отработки этой величины покаждой координате, определяемой блоком1 контроля отработки программы. Послеотработки записанной информации происходит запись следующего кадра программыиз блока памяти 2 в интерполятор 6.Отработка нового кадра производитсяаналогичным образом, Процессповторяется до конца отработки всей программы.Применение изобретения позволит засчет повышения скорости обработки программы возможности регулирования скорости отработки программы и аналитического программирования значительно740491 формула изобретения Контурная система программного управления многокоординвтным манипулятором, содержашая блок обратной связи, выход которого непосредственно и через блок контроля обработки программы соединен соответственно с первым и вторым входами блока управления, первый выход и третий вход которого соединены с блоком памяти, а второй 15 выход - со вторым входом блока конч роля обработки программы и с первым аходом интерполятора, второй вход которого соединен с выходом генератора тактовых импульсов, а выходы - со ахода ми приводов, о т л и ч а ю щ в я с я тем, что, с целью расширения области применения системы, она содержит блок 1 О Составитель Г. Н едвктор Н. Каменская ТехредМ, Петкодов рректор Е. П Заказ 30 97/1 5 ТиНИИПИ Государствпо делам изобр113035, Москва,аж 1033 Подписное нного комитета СССРетений и открытий Ж, Раушская набд. 4/5 П ент", г, Ужгород, ул. Проектная,5расширить область применения предложенной системы. подготовки и коррекции программы ипоследовательно соединенные звдатчиквременного интервала, формировательвременного интервала и формировательсйгнала записи, второй вход которого подлючен к выходу блока обратной связи, авыход к четвертому аходу блока управления и второму аходу формирователя временного интервала, третий вход которого соединен с выходом генератора тактовых импульсов, третий выход блока управления через блок подготовки н коррекциипрограммы подключен к пятому своемувходу а шестой вход блока управлениясоединен с выходом формирователя временного интервала.Источники информации,принятые во вниманне при экспертизе1. Авторское свидетельство СССР395807 э кл.0519/40.2. Белянин П. Н. Промышленные роботы, М, Машиностроение, 1978,с. 250-254 (прототип).
СмотретьЗаявка
2492745, 06.06.1977
МИНСКИЙ ФИЛИАЛ МОСКОВСКОГО КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОГО БЮРО
ЖАЛНЕРОВИЧ ЕВГЕНИЙ АЛЕКСАНДРОВИЧ, БИРЮКОВ ЮРИЙ ВЛАДИМИРОВИЧ, ПЕТРОВСКИЙ ЛЕОНИД ВАСИЛЬЕВИЧ, ЗАЙЦЕВ ВИКТОР ГЕОРГИЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: контурная, манипулятором, многокоординатным, программного
Опубликовано: 15.06.1980
Код ссылки
<a href="https://patents.su/3-740491-konturnaya-sistema-programmnogo-upravleniya-mnogokoordinatnym-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система программного управления многокоординатным манипулятором</a>
Устройство для записи и воспроизведения информации из блоков оперативной памяти с коррекцией ошибки

Номер патента: 974410
Опубликовано: 15.11.1982
МПК: G11C 29/00, G11C 7/24
Метки: блоков, воспроизведения, записи, информации, коррекцией, оперативной, ошибки, памяти
...различным путем. Обору дование генератора, задействованное для генерации битов 50, 51, 52, 53, 54, 5, 56, 57 при прямой подаче информации и кода Хэмминга на вход генератора, генерирует соответственно биты 54, 55, 56 57, 50, 51 52, 53.при подаче той же информации и кода Хэмминга с кольцевым сдвигом.Результаты обеих генераций должны совпадать, если соответствуюшее оборудование функционирует правильно.Сравнение результата генераций осуществляется в блоке сравнения синдромов 13. Скорректированная информация, записанная в регистр 19, поступает иа первый вход контрольной схемы сравнения 16. На третий вход через селектор 15 поступает скорректированный побайтный паритет сообщения. На второй вход через второй элемент И 10 из регистра 1...
Устройство для сопряжения оперативной памяти с внешними устройствами

Номер патента: 993237
Опубликовано: 30.01.1983
Авторы: Верига, Овсянников, Погодаев, Шевченко
МПК: G06F 3/04
Метки: внешними, оперативной, памяти, сопряжения, устройствами
...то микропрограмма устанавливает соответствующий код условия через управляющие шины 32 и узел 43 конца операцииввода-вывода, который поступает через 10шины 18 центрального процессора в процессор. По сигналу кода условия процессоР снимает инструкцию вводавывода с шин 18 и переходит к выборке и выполнению следующей инструкции, 5 Устройство после установки сигнала кода условия считывает ( запомненный ранее в локальной памяти 47 ) адрес прерванной микропрограммы иэ локальной памяти и заносит его в регистр54, как было описано выше, и прерванная (запросом на инструкцию ввода- вывода ) микропрограмма продолжается. В случае, когда канал (подканал)свободен, то микррпрограмма переходит к пункту 2;2 ) адрес внешнего устройства поступает из...
Программируемый генератор импульсов
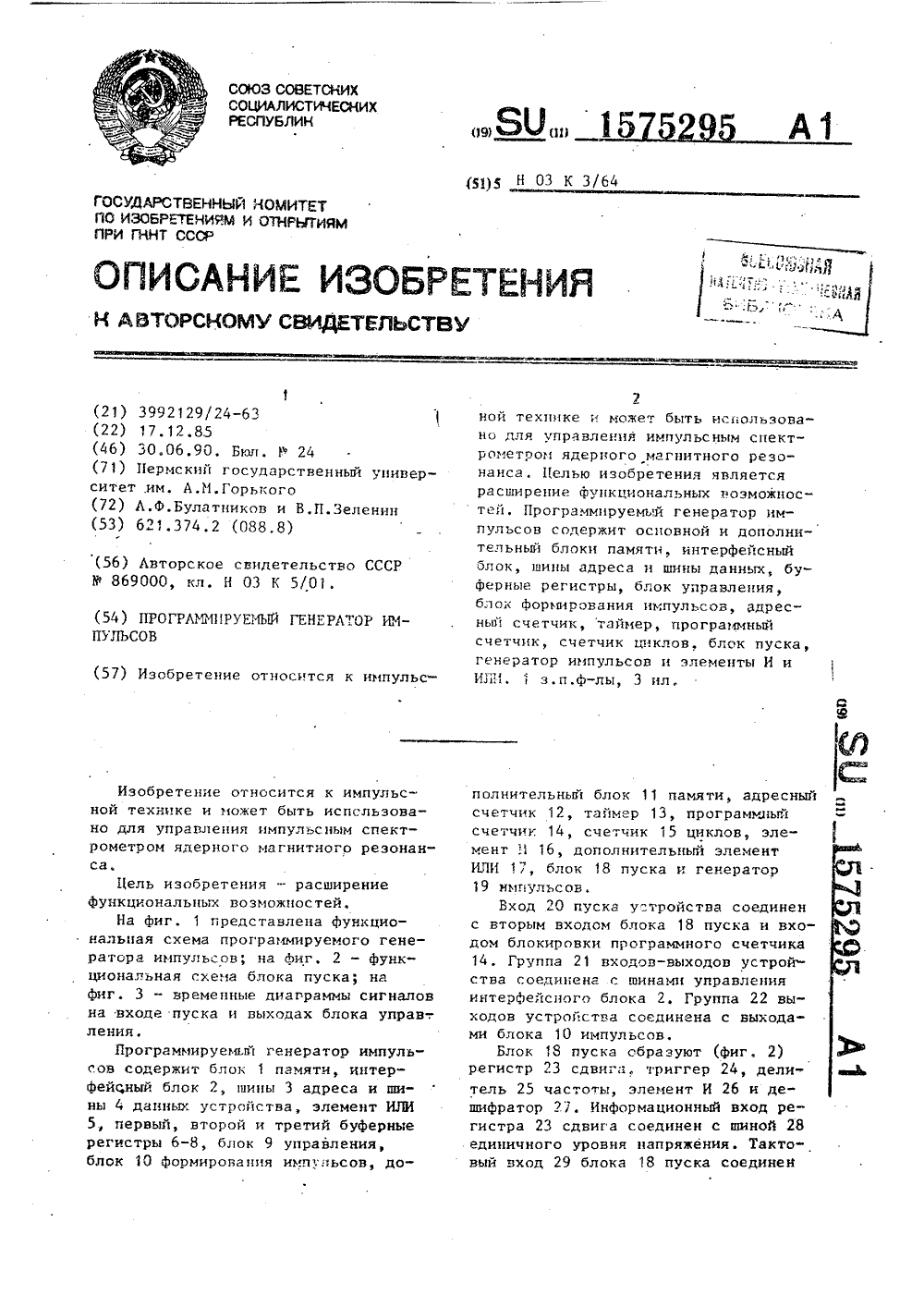
Номер патента: 1575295
Опубликовано: 30.06.1990
Авторы: Булатников, Зеленин
МПК: H03K 3/64
Метки: генератор, импульсов, программируемый
...последовательности операционных команд, тоописанный цикл продолжается до считывания команды "Стоп", которая расшифровывается дешифратсрсм 27 блока18 пуска.Однако вследствие того, что вимомент считывания команды Стопиз блока 1 памяти программируемыйгенератор импульсов отрабатывает последний временной интервал программы 40то остановку устройства необходимозадержать до окончания этого интервала, для чего дешифратор 27 блока 18пуска стробируется сигналом с выхода 45;таймера 13.Т ( (А - В) гг - (С - В) 1, - "Стоп" осуществляется следующим образом.В этом случае в программе должны присутствовать управляющие команды, которые обозначаются следующим образом:(- - команда НЦ, в ней кодируется число повторений цикла, записываемое после закрывающейся...
Устройство для моделирования сетей петри

Номер патента: 1709348
Опубликовано: 30.01.1992
Автор: Дорошенко
МПК: G06F 15/173
Метки: моделирования, петри, сетей
...устройства для подключения к входам запроса соответствующих датчиков случайных чисел (ДСЧ), входы 28 "Число" которого образуют группу входов устройства для подключения к выходам соответствующих ДСЧ.Схемы блоков предлагаемого устройства, кроме блока 22 выбора времени, известны,Блок 22 выбора времени содержит генератор 37 тактовых импульсов, три элемента ИЛИ 30,36 и 38, триггер 40, элемент 29 задержки, элемент И 39, группу й регистров 31 хранения моментов ближайших времен, где и - число временных переходов в сети, группу й 33 реверсивных счетчиков, группу Ь сумматоров 32, группу й ВЗ-триггеров 34, группу и элементов 35 задержки.Схемы элементы И, ИЛИ, ВЯ-триггеров, генератора тактовых импульсов, сумматоров, реверсивных счетчиков,...
Устройство для адресации памяти

Номер патента: 1741142
Опубликовано: 15.06.1992
Авторы: Боженко, Мешков, Фегецин
МПК: G06F 12/08
...- на К 555 ИМ 6, мультиплексор 19 - на К 555 КП 11, регистры 20 и 21 - на К 555 ТМ 8, шинные формирователи 23 - на КР 580 ВА 86, остальные элементы также выполнены на серии К 555.Устройство работает следующим образом.При включении устройства микропроцессор (на фиг. 1 не приведен) по ШУ 13 устанавливает в течение нескольких тактов сигнал сброса по входу СБР КПДП 1 и входу сброса триггера 3, При этом сигнал блокировки с выхода ЗПТ КПДП 1 принимает значение "0", разрешая работу дешифратора 8, отключая выходы блоков 11 и 12 по их вторым управляющим входам от ША 15. КПДП 1 для работы одного из четырех его штатных каналов поддерживается находящимся в нем 16-разрядным регистром начального адреса (РА), в который заносится начальный адрес...
Предыдущий патент: Пневматический пистолет для забивки гвоздей
Следующий патент: Манипулятор
Случайный патент: Резьбонакатной инструмент