Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 734614
Авторы: Авсеевич, Данилевский, Кузеев, Розин, Соколовский

Текст
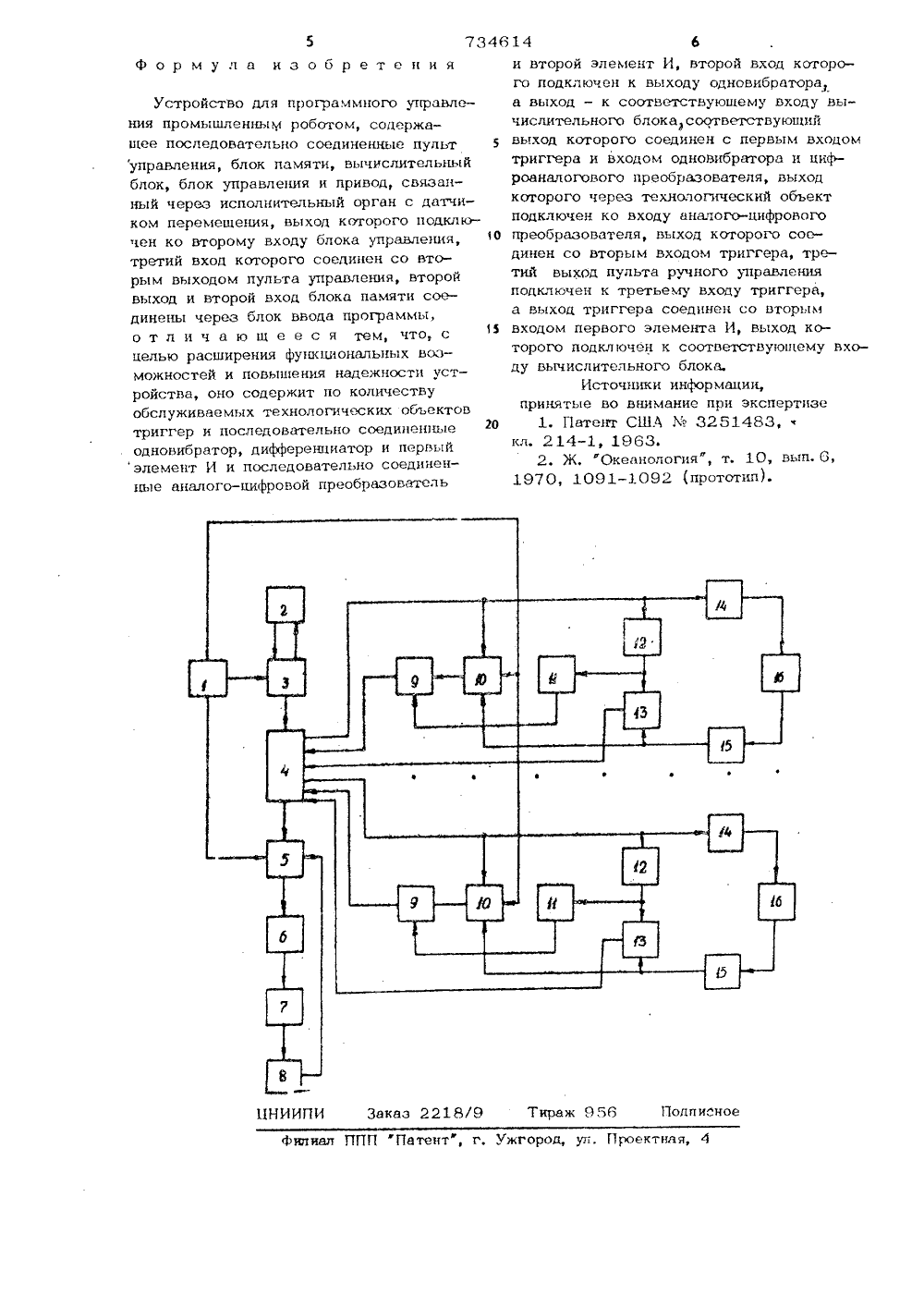
г. сссвеэчилатеч нсИЕОП ИсИЗОБРЕТЕНИЯ Союз СоветскнкСоциалистическиеРеспублик н 734614 К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(23) Приоритет оо делам изобретений и открытий(088.8) 1 гата опубликования описания 17.05.80 И, А. Авсеевич, В, П. Данилевский, Е. ф. Кузеев,Б. Ш. Розин и ф. П. Соколовский(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМИзобретение относится к робототехнике и может быть использовано при создании устройств для управления промышленным роботом, работающего совмесч но с различным технологическим оборудование м.Известно устройство для программного управления промышленным роботом, содержащее запоминающий контактный барабан с перфорированной лентой, привод, механический элемент сравнения и датчик обратной связи в виде нодпружиненной тяги 13.Однако оно выполнено на довольно сложных, механически связанных элементах, имеющих невысокую точность и надежность.Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные пульт ручного управления, блок памяти, вычислительный блок, блок управления и привод, связанный через звено исполнительного органа с датчиком перемещения,выход которого гтодключен ко второмувходу блока управле 1 щя, третий вход которого соединен со вторым выходом пульта ручного управления, второй выход бло -ка памяти через блок ввода программыподключен ко второму своему входу 2.Недостатком известного устройстваявляется отсутствие сикхронизировакнойработы промышленного робота с элеоментами технологического оборчдованиячто ограничивает возможности робота иснижает безопасность его работы.Цель изобретения - расширение фу нкциональных возможностей и повышение 15надежности устройства.Поставленная цель достигается тем,что устройство содержит по количествуобслуживаемых технологических объектовпоследовательно соединенкые аналого-цифровой преобразователь и второй элементтИ, второй вход которого подключен к триггеру, цифроаналоговый преобразователь,последовательно соединеккые одновибратор, дифференциатор и первый элементз 7, И и последОВатсльно соединеепеые аняло - го-цифровой еереобразоезатель и второй элемент И, второй вход ксторого цодклю - чен к выходу одновибратора, а выход - к соответствующему входу Вычислитель - ного блока, соответствуюцеий выход ко - ТОРОГО СОЕДЕЕЕКЕЕЕ С ПЕРВЫМ ВХОДОМ тРИГГЕ- ра и входом одновибратора и цифроаналогового преобразователя, выход которого через технологический объект подключен ко входу аналого-цифрового преобразователя, выход которого соединен со вторым входом триггера, третий выход пульта ручного управления подключен к третьему входу триггера, а выход триггера соединен со вторым входом первого зле - мента И, выход которого подключен к СООТВЕТСТВУЮЩЕМУ ВХОДУ ВЫЧИСХЕЕТЕЛЬ- ного блока.На чертеже предстаеэлена блок - с:хема устройства.Устройство содержит пульт .1 руееео - го управления, блок 2 ввода программы, блок 3 памяти, вычислительный блок 4, блок 5 управления, привод 6, звено исполцителыеого органа 7, датчик 8 пе - ремеше;шй, первый з.еемецт 9 И, триггер 10, дифференцееатор 11 одновибратоэ 12, втоеэои элемент 1 3 Иэ цифроееналогоезый преобразователь 14, аееалого-еееефровой преобразователь .1 5, технологическийэлемент 16.Устройство работает слепуюцеее разом.Робот имеет два режима работех; обучения и еерограммееый. В рехсиме обу - чения с помоецью пульта 1 ручного управления оператор производит необходимые маееепеуляции испоэеееительееьем органом робота. Сигналы управления заносятся в блок 3 Памяти и одновременно через Вычислительный блок 4 на блок 5 упра - вления, который производит управление приводом 6, перемещающим звено исполнительного органа 7. Датчики 8 перемещений генерируют сигналы об отработке заданных перемещений. Траектория пе - ремещения элементов исполнительного органа может также задаваться с псхмоп 1 ью еерограмелоносителя через блок 2 ввода программы. 15 процессе уееравления при взаимодействии робота с технологическими элементами 16 в нужный момент из вычислительного блока 4 в систему управления технологического элемента 16 поступа - ет синхроцизирующий импульс. Так как себычЕео системы управления технологи 34614ческим элемееетом 16 аналоговые, тоимпульс преобразуется цифроаналоговымпреобразователем 14 в соответствующуюкоманду. По этой команде техцологичес 5кий элемент 16 на еееееает свой производственнеяй цикл ееаееример, штамп произ -водит штамповку детали). Одновременносицхронизируюший импульс поступает цавход одееовибратора 12, запуская его и10 триггер 10, устанавливая еи его выходесостояеспе "1 , одновибратор 12 вырабатьевает импульс у 1 эовня 1которьей ловремени несколько перекрывает производствеееееьей цикл техно,еогического злемен 15 та 16,По окончании производственного цикласистема техлологического элемента 16выдаст сигнал об отработке заданногоцикла (ееапример, пуансон штампа вернул -20 ся в верхнее положение), Этот сигнал,преобразованный аналого-цифровым преобразователем поступает на вход триггера10, перебрасьевая его в состояние 0",и ца Второй вход второго элемента 13 И,25 Таес как В зто время ца первом входеэтого элемента преесутствусэт сигцал с одцовибратора 12, то с выхода второгоз еемеита 13 И в вычислительном блоке4 поступит импульс-сигнал сб окончании30 рабочего цикла технологическим элементом 16 И и установке его подвижныхсэеэ где еов в исходное пол 07 кение. При постуцлецепе этого сигнала робот выполняетрабочую Операцию, еипример забирает35 деталь из матрееец:е штампа. При отсутствии сигееала об окончаепеи;п.кла работы технологического элемента 16 с выхода триггера 10 снимаетсянапряжение уровеея 1, По окончании0импульса одновибратора на второй входпервого элемента 9 И поступает иолох еетеле ееьей импульс с дифференциатора 11,Этому импульсу будет соответствоватьимпульсный сигцал-команда аварийного45состояеееея технологического элемента 16,поступаюецая на вход вьгчислительееогоблока 4 с выхода первого элемента 9 И.еПо этому сигналу робота работа прекрацеается. Дальцейший пуск робота вскэ 50можен после устранения неисправнсэстиВ технологическом элементе 16 по сие- цалу пульта 1 ручного управления. Приэтом триггеры 10 устанавливаются висходное состояние,55Применение цдобретеция позволитобеспечить надежную работу роботов приих сопряжении с различным технологическим оборудованием.734614 ж 956 пи"ное роектна я ород,формула изобретения Устройство для программного управления промышленны роботом, содержащее последовательно соединенные пульт 5 управления, блок памяти, вычислительный блок, блок управления и привод, связанный через исполнительный орган с датчиком перемещения, выход которого подключен ко второму входу блока управления, третий вход которого соединен со вторым выходом пульта управления, второй выход и второй вход блока памяти соединены через блок ввода программы, отличаюшееся тем, что,с15 целью расширения функциональных воз - мокностей и повыцения надежности устройства, оно содержит по количеству обслуживаемых технологических объектов триггер и последовательно соединенные одновибратор, дифференциатор и первый элемент И и последовательно соединенные аналого-цифровой преобразователь ЦНИИПИ Заказ 2218/ илиал ППП Патент, г. и второй элемент И, второй вход которого подключен к выходу одновибратораа выход - к соответствуюшему входу вычислительного блока соответствующийвыход которого соединен с первым входомтриггера и входом одновибратора и цифроаналогового преобразователя, выходкоторого через технологический объектподключен ко входу аналого-цифровогопреобразователя, выход которого соединен со вторым входом триггера, третий выход пульта ручного управленияподключен к третьему входу триггера,а выход триггера соединен со вторымвходом первого элемента И, выход которого подключен к соответствующему входу вычислительного блока,Источники информациипринятые во внимание при экспертизе1. Патент СШЛ М 3251483, .кл. 214-1, 1963.2. Ж. Океанология, т. 10, вып, 6,1970, 1091 - 1092 (прототип).
СмотретьЗаявка
2571254, 17.01.1978
ПРЕДПРИЯТИЕ ПЯ М-5671
АВСЕЕВИЧ ИГОРЬ АЛЕКСАНДРОВИЧ, ДАНИЛЕВСКИЙ ВЛАДИМИР НИКОЛАЕВИЧ, КУЗЕЕВ ЕВГЕНИЙ ФЕДОРОВИЧ, РОЗИН БОРИС ШАЕВИЧ, СОКОЛОВСКИЙ ФЕЛИКС ПАВЛОВИЧ
МПК / Метки
МПК: B25J 9/00, G05B 19/02
Метки: программного, промышленным, роботом
Опубликовано: 15.05.1980
Код ссылки
<a href="https://patents.su/3-734614-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Пневматический триггер со счетным входом

Номер патента: 363968
Опубликовано: 01.01.1973
МПК: G06D 7/00
Метки: входом, пневматический, счетным, триггер
...каналы б - 19 элемента 20 памяти соответственно, входной канал 20триггера, выходные каналы 21, 22 элемента памяти, дополнительные каналы 23 и 24 записи 1 и 0 соответственно.Триггер работает следующим образом.25 При подаче питания на триггер на его выходе 3 появляется сигнал 1. Этот сигнал че- рез дроссель 10 поступает на элемент 5 и через него подается на вход 13 элемента 4.Сигнал 1, поступивший ца канал 20, че рез дроссель 12 подается ца элемент 4 и, вза363968 го аа 197 Изд.104 аж 403 Подпис пография, пр, Сапунова, 2 3имодействуя с управляющей струей канала 18, образует сигнал 1 в выходном канале 21, который поступает на запрещающий вход элемента б и на один из основных входов элемента 7. В результате сигнал 1 от элемента 7...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1328766
Опубликовано: 07.08.1987
Авторы: Головков, Кузнецов, Недвецкая, Осипов, Павлов
МПК: G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...6 обработки и программного управления поочередно подключает датчики 11 к входу АЦП 5, с выхода которого информация о величине напряженности поля в отрезке микрополосковой линии ных составляющих светового луча (необыкновенный луч) приобретает Фазо- .вьй сдвиг, онределяемый выражением 2, 2 2= 1 с 11 .з 1 п - й + 1 с 11 з 1 п1 Ъ1 Таким образом, в режиме калибровки устанавливается длина удлинителя 13 аптического пути, равная 11=(И + - ). В этом случае вышедший8из подложки отрезка микрополосковой линии 2 луч имеет сдвиг Фазы необыкновенного луча, пропорциональный квадрату амплитуды поля в данном сечении отрезка микрополосковой линии 2 и независящий от времени. Отградуировав предварительно устройство, изменяющее длину оптического пути...
Устройство для измерения параметров отражения сигнала от входа свч-элементов

Номер патента: 1741034
Опубликовано: 15.06.1992
Авторы: Воронов, Головков, Осипов, Павлов, Приходько
МПК: G01N 22/00, G01R 27/26
Метки: входа, отражения, параметров, свч-элементов, сигнала
...для реализации интерференции двух световых лучей,прошедших через сечение измерительной линии 2. Фотоприемник 13 предназначен для преобразования интенсивности светового луча на выходе сумматора 12 света в электрический сигнал. Источник 3 смещения предназначен для установки требуемой рабочей точки на модуляционной характеристике интерферометра.Устройство работает в двух режимах; режиме калибровки и режиме измерения,В режиме калибровки к измерительной линии 2 вместо исследуемого элемента подключается эталонная короткозамкнутая линия. Сигнал СВЧ-генератора 1 поступает на вход измерительной линии 2 и далее на эталонную линию. В результате интерференции падающей и отраженной волн СВЧ-сигнала в измерительной линии устанавливается режим...
Устройство для контроля логических блоков

Номер патента: 875390
Опубликовано: 23.10.1981
МПК: G06F 11/25
Метки: блоков, логических
...7 поступают на входы регистров 9,В это время блок 2 закрывает элементы 6. Генератор 11 по импульсам сдвига записываетэту информацию параллельно в первые разрядып сдвигающих регистров 9, каждый из которыхимеет т - разрядов, Блок 2 блокирует злемент 12, поэтому импульсы сдвига не поступают на сигнатурный анализатор 3 и не записывают в него информации.Затем задатчик 13 выдает второй тест, Блок 2 по второму импульсу сдвига переписывает в регистры 9 с учетом влияния обратных свя. зей через сумматоры 8 информацию с выходов блока 1, В результате реализации всей программы блок 2 записывает в регистры 9 поканаль. но в сжатом (в еигатуры) виде информацию с выходов блока 1. По окончании программы блок 2 закрывает элементы 5 и открывает...
Устройство для контроля логических блоков

Номер патента: 1070562
Опубликовано: 30.01.1984
Авторы: Ильин, Николаев, Храпко
МПК: G06F 11/22
Метки: блоков, логических
...второго блока индикации, пятымивходами - с соответствующими клемма; ми для подключения входов контролируемого логического блока и с вторыми входами второго блока индикации, первые входы блока сравнения соединены с соответствующими вторыми выходами задатчика тестов, вторые входы - с соответствующими выходами сигнатурного анализатора, а выход с входом блока управления. Блок управления содержит первый переключатель, соединенный первым выводом с общей шиной устройства, вторым и третьим выводами - с соответствующими первым и вторым входами первого триггера, соединенного выходом с первым входом элемента45 ИЛИ, соединенного вторым входом свходом блока, выходом - с третьимвыходом, блока и с входом первогоэлемента задержки, соединенноговыходом...
Предыдущий патент: Цифровая следящая система
Следующий патент: Линейно-круговой интерполятор
Случайный патент: Устройство для подсчета деталей