Линейно-круговой интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
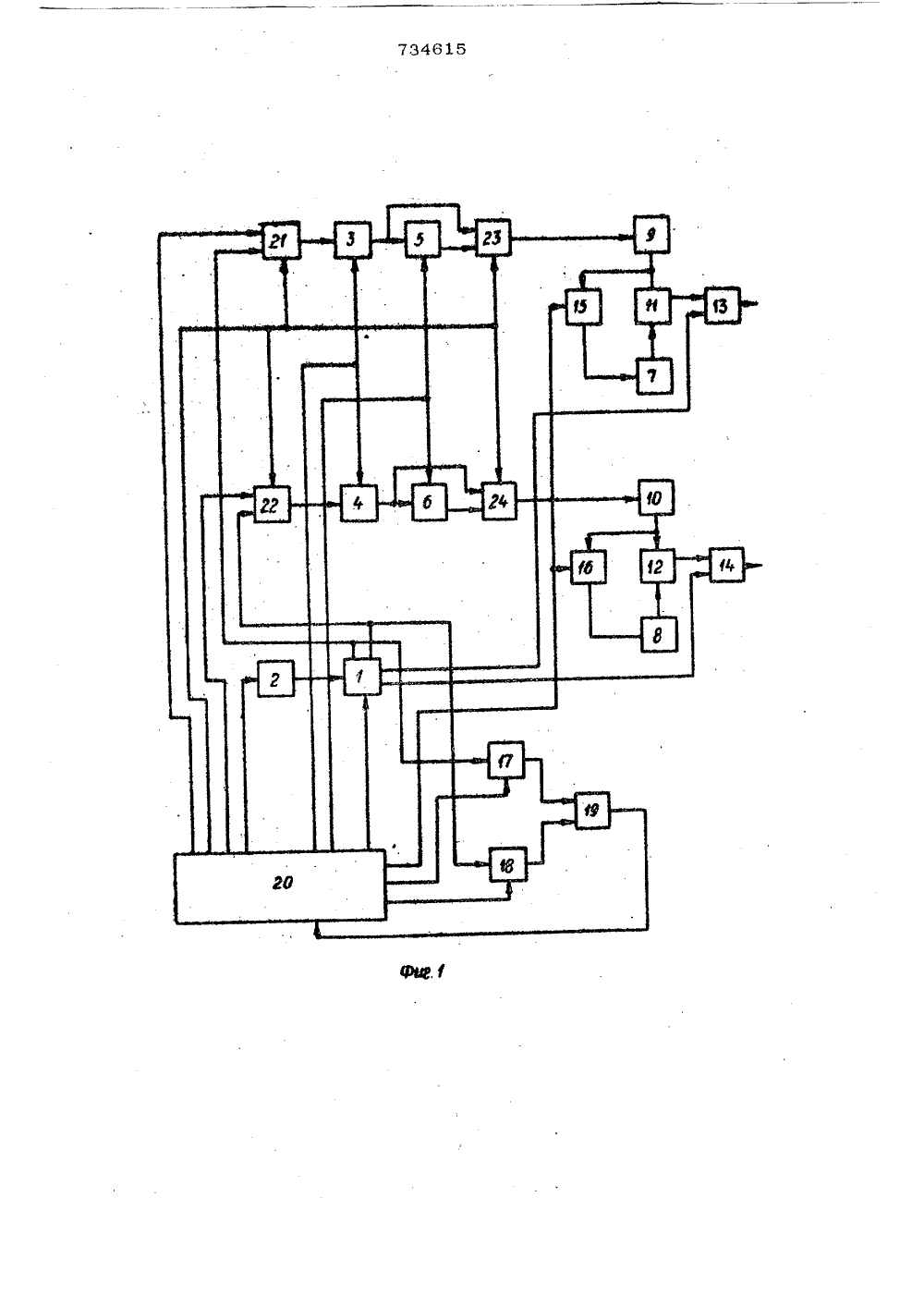
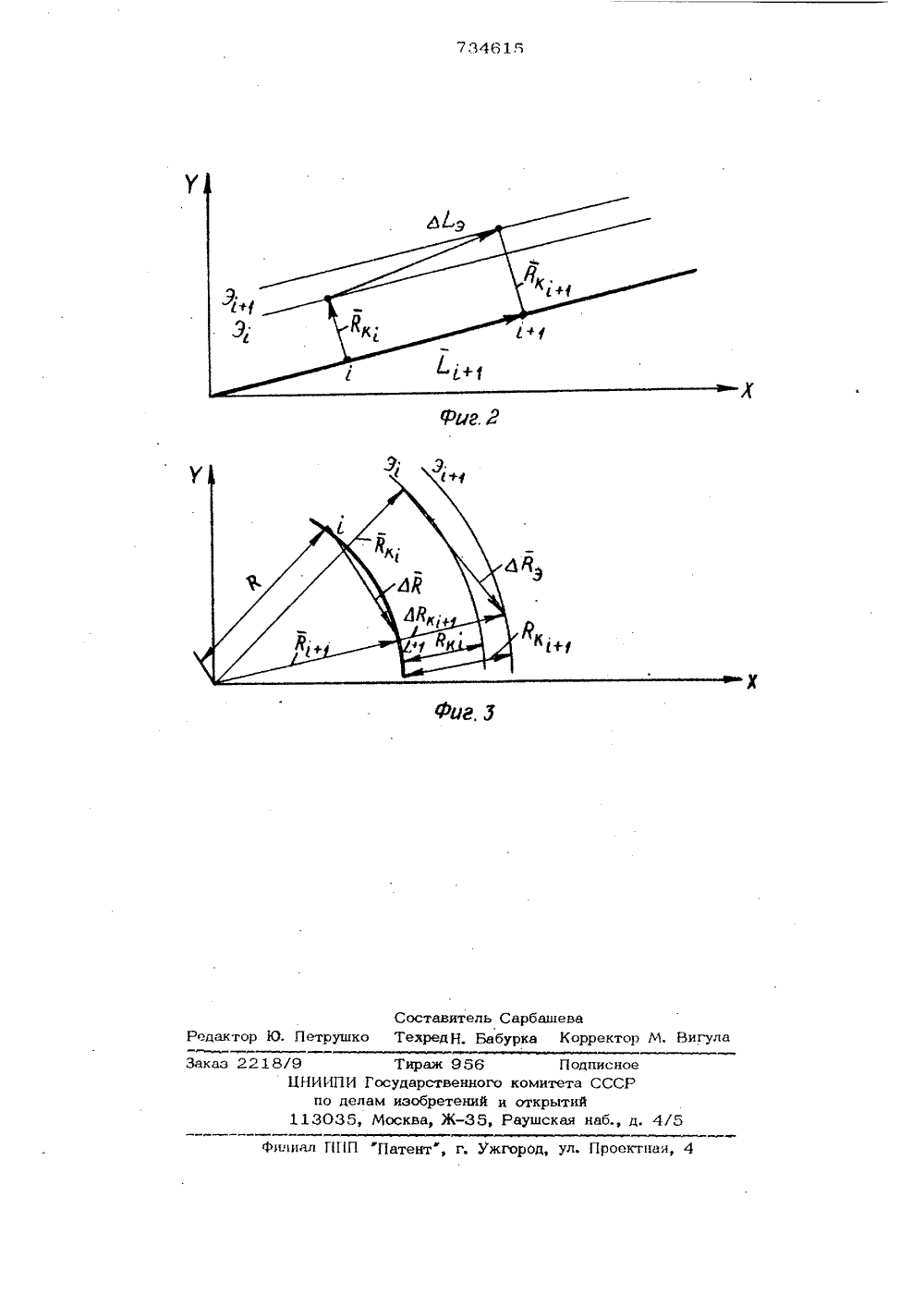
Союз СоветскихСоцналнстнчеснихРеспублик ОП ИГРАНИ Е ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Е 1 1,734615(23)Приоритет по делам изобретений и открытийОпубликовано 15.05.80. Бюллетень18 Дата опубликования описания 16.05.80(54) ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР Изобретение относится к программному управлению металлорежущими станками, конкретно к устройству систем числового программного управления.Известен лиееейно-круговой интерполятор, содержащий устройства расчета экви 5 дистанты, блок задания скорости и блок интерполяции и позволяющие осуществлять коррекцию размера режущего инструментаИзвестен также линейнс круговой интерполяторт содержащий блок управления, первый выход которого подключен ко входу блока задания скорости, выход которого подключен к первому входу блока линейно- круговой интерполяции, второй и третий выходы блока управления подсоединены к первым входам первых коммутаторов в каждой координате, а четвертый выход ко вторым входам первых коммутаторов, третьи входы которых соединены с соотВетствующими первыми выходами блока линейно-круговой интерполяции, второй вход которого подключен к пятому выхо 2ду блока управлешея 2. Этот цнтерполятор позволяет производить в режиме круговой интерполяции синхронное вычисление величин приращений коррекции и координат основного контура. При этом рассчитываются коды приращений по координатам, определяющие вектора в режиме круговой интерполяции коды, определяющие вектор дк и коды, определяющие вектор ЬР, макс.Недостатокданногоинтерполятора заключается в том, что величина приращений коррекции (вектор ЬРЕ макс) в процессе интерполирования не может быть изменена во время отработки участка основного контура, заданного кадром исходной информации. Этот недостаток ограничивает функциональньее возможности и область применения цифрового цнтерполятора.. Бель изобретения - расшеереецее функциональных возможностей интерполятора, заключающееся в обеспечении возможиости адаптивного управления точностью734615 фмой,аи ДУги Х, и ь, в Умножители3 и 4 - велйчина радиуса коррекции эквидистанты К ь знак которой учиты -веет положение инструмента относительцо детали, в режиме линейной интерполяции - в блок 1 - координаты конечнойточки прямой Х и УК, на коммутаторьь21 и 22 - соответственно функции угланаклоня ььрямой: Хуи А, =, И с,об сС= -1 115 3процесса обработки посредством корр кцииэквидистацты в произвольные моменты Времени.Указанная цель достигается тем, чтов устройство включены два блока срав -нения, блок совпадения и по каждой ко -ординате блок переноса, первый регистри последовательно соединенные умножитель, делитель, второй коммутатор, второй регистр, первьлй и второй сумматоры,в каждой координате первый вход умножителя соединен с выходом первого комМутятора, а выход - со вторым входомвторого коммутатора, Выход первого ре -ЬИСРЯ СОЕДИНЕН СО ВТОРЫМ ВХОДОМ ПЕРВО -го сумматора, а вход - с выходом блокапервььоса, первый вход которого подключенк иьостому выходу блока управлепия, аВторой ь 5 ход - к выходу второго регистра,второй вход второго сумматора соединенсо Вторым ььь,ьходом бьока линейно-круговой иььтерььоььяььии, первые выходы которого подключииы соответственно к первымвходам цеььиого и Второго блоков сраьнения, вторые входы которых подключенык седьмому и восьмому выходам блокауыраыььеьььььь, а выходы - ко входам блока совпадения, выход которого соединенсо входом блоке управ:ьеыия, третьи входы коммутаторов подключены ко Вторымвходам первых коммутаторов. Вторьье входы умножителей и делителей ььодкию ьэььььк девятому и десятому ььходям блокауправления соответственно.На фиг, 1 представлена блок-схемаинтерполятара; иа фиг. 2 и 3 - диаграммы работы,Интерпол 5 ьто содержит блок 1 линейИО-кру ГОП ой интерпол Яцьии блок 2 заданийскорости ульььоькители 3 и 4, делители5 и 6, ььорвьье 7 и 8 и Вторые ."ь и 10рогистрььььервые 11 и 12 и вторьье13 и 14 суммяторь;, блоки 15 и 16 переноса, первый 17 и второй 18 блокисраВнения, о:ьок 1 О соиьяььеьььь 5 ьб.ьок 20управления и первые 21 и 22 и торые23 и 24 коммутаторы,ььнтерполятоо функционирует в двухрежимах: линейной и круговой иььтерполяции, управление которыми ььроизььодиьблок 20,В режиме линейной иитерььол 5 ьпьььь нявсех коммутаторах работают одни входьь,а в режиме круговой - другие входы.В качестве исходных данных в иитерполятор задаются: в обоих режимах работы в блок 2 - величина контурной скорости , в блоки 17 и 18 - соответственно координаты конечной тоькьь я -15 20 25 30 ъ 5 4 О 45 50 55 в режиме круговой интерполяции - В блок1 - координаты начальной точки дугив делители 5 и 6 - Величина радиуса окружности Я.Блок 1 вместе с блоком 2 производятинтерполяцию контура детали. С выходовблоха 1 на входы сумматоров 12 и 14поступают соответственно цифровые кодылК.; и ь 1, определяющие Векторы ,1,(фиг, 2) и 2 Л(фиг, 3),В режиме линейной интерполяции,поступающие с выходов блока 20 значения ЙьЬ хи со 54 умножаются в умножителях3 и 4 на величину коррекции эквидистанты ь которая поступает с выходаблока,СО и может изменяться во времени по любому закону. Полученные кодьь,ОпРеделЯющие вектоР Рк,(фиг. 2), постУпают в регистр 9 и 10.В режиме круговой интерполяции свььхоаов бьока 1 ча умножители 3 и 4поступают соответственно коды текущихкоордиььат Х и М, Определяющие вектор ; (фиг. 3). После умножения наумножььтелях 3 и 4 на величину , и делензья на ,целителях 5 и 6 на величину радиуса ОеружиОсти Я поступаюьпую с Вы -хода блока 2, получаются кодьь, определяющие вектор ,. (фиг. 2) и поступающие в регистры 9 и 10. В регистрах7 и 8 храичтся коды, определяющие век -тор х фиг 3 и 4), Они заносятсясоответствениоиз регистров Э и 10в дополнительном коде в конце предыдущего цикла вычислений по сигналус выхода блока 20. В сумматорах 11 и12 производится сложение кодов, поступающих саответ.твенно из регистров 7 и 9,и 8 и 10. В результате образуются кодылКи й 5 Ь,., определяющие разность векторов % и Я и поступающие на ссЪ К 5-1ответствующие входы сумматоров 13 и14,Таким образом, ня выходах сумматоров13 и 14, которые являются выходами5фиг. 4) в соответствии со следующи ми соотношениями:эк цк.ь% . фс+и ьЭВ блоках 17 и 18 происходит сравнение текущих координат Х и У с координатами конечной точки Х и , . При ,равенствеэтих величин с выходов блоков 17 и 18 на входы блока 19 поступают сигналы. Совпадение сигналов на входах блока 19 вызывает сигнал конца кадра с выхода блока 19 на блок 20.Экономический эффект достигается за счет оперативной коррекции эквидистанты в любой момент обработки, например, при адаптивном управлении точностью обработки путем изменения траектории движения фрезы, при коррекции радиуса фрезы во время обработки труднообрабатываемых материалов, при разработке устройств аварийного отвода инструмента от обрабатываемой поверхности,фор мула изобретенияЛинейно-круговой интерполятор, содержащий блок управления, первый выход которого подключен ко входу блока задания скорости, выход которого подключен к первому входу блока линейно-круговой интерполяции, второй и третий выходыблока управления подсоединены к первым входам первых коммутаторов в каждой координате, а четвертый выход - ко вторым входам первых коммутаторов, третьи входы которых соединены с соответствующими первыми выходами блока линейно-круговой интерполяции, второй 734615 6вход которого подключен к пятому выходу блока управления, о т л и ч а ю -щ и й с я тем, что, с целью расширения функциональных возможностей интерполятора, он содержит два блока сравнения, блок совпадения и по каждой координате блок переноса, первый регистри последовательно соединенные умножитель, делитель, второй коммутатор, втоО рой регистр, первый и второй сумматоры,в каждой координате первый вход умножителя соединен с выходом первого коммутатора, а выход - со вторым входомвторого коммутатора выход первого реИ гистра соединен со вторым входом первого сумматора, а вход - с выходомблока переноса, первый вход которогоподключен к шестому выходу блока управления, а второй вход - к выходу вто 20 рого регистра, второй вход второго сумматора соединен со вторым выходом блока линейно-круговой интерполяции, первыевыходы которого подключены соответственно к первым входам первого и второго25 блоков сравнения, вторые входы которыхподключены к седьмому и восьмому выходам блока управления, а выходы - ковходам блока совпадения, выход которогосоединен со входом блока управления,ЗО третьи входы вторых коммутаторов подключены ко вторым входам первых коммутаторов, вторые входы умножителейи делителей подключены к девятому идесятому выходам блока управления сь 35 ответственно.Источники информации,принятые во внимание при экспертизе1. Способы подготовки программи интерцоляторы для контурных систем40 числового управления станками. М.,"Машиностроение, 1970, с.130-142.2. Авторское свидетельство СССРМю 394795, кл. б 06 Р 15/46, 1971,734615 Фиг, 5 18/9 Т ЦНИИПИ Госуд по делам из 113035, Мосираж 956 Подписноерственного комитета СССРобретений и открытийа, Ж, Раушская наб., д. 4/5 каз П 1 П Патент, г. Ужгород, ул. Проегпии, 4 Составитель Сарбашевааддктор Ю. Петрушко ТехреаН, вуркв корректор М. В
СмотретьЗаявка
2530328, 26.09.1977
ПРЕДПРИЯТИЕ ПЯ Г-4086
КУПЕРМАН БОРИС МОИСЕЕВИЧ, ЛОНШАКОВ ВЛАДИМИР ПЕТРОВИЧ, РАБИНОВИЧ АНАТОЛИЙ ЕФИМОВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/4103
Метки: интерполятор, линейно-круговой
Опубликовано: 15.05.1980
Код ссылки
<a href="https://patents.su/5-734615-linejjno-krugovojj-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Линейно-круговой интерполятор</a>
Устройство для контроля входа и выхода рабочих и служащих

Номер патента: 615514
Опубликовано: 15.07.1978
Авторы: Козинцев, Морозов, Покидаев, Шаровар
МПК: G07C 1/10
Метки: входа, выхода, рабочих, служащих
...открывается сигналом, вырабатываемым формирователем 13 опроса регистра анализа, Появившийся сигнал на ее выходе проходит через элемент ИЛИ 25 на формирователе 8 выходной информации, который под действием этого сигнала вырабатывает ответную информацию, разрешающую вход на объект по шйне 12, й сигйал 5 10 15 20 25 30 35 40 45 50 55 60 65 на элемент И 40. Элемент И 40, подготовленный по другому входу блоком 1 приема команд, срабатывает и появившийся сигнал на его выходе поступает через элемент ИЛИ 42 на элементы И 30, 31 блока 10 корректива и через элемент ИЛИ 6 на блок памяти 9 и второй формирователь 18 сигналов управления блоком памяти, В результате избирательная схема 31 выбранного дешифратора 4 информативного узла 27 срабатывает...
Устройство для регистрации времени входа и выхода

Номер патента: 875415
Опубликовано: 23.10.1981
Авторы: Баженов, Графенбергер, Матвеев, Чех, Шкроб
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...7 памяти, способный хранить его (один) массив информации. Он хранится здесь до,тех пор, пока 5 4вахтер охраны (иди устройство идентификации) не убедится в соответствиитабельному номеру лица фактически следующего через контроль. По окончанииэФой операции сотрудник охраны (илиустройство идентификадии) замыкаетвторой ключ 8, вследствие чего массивинформации поступает в блок 9 выдачиинформации, и записывается на магнитную ленту. Одновременно на вход блока 11 индикации поступает через второй ключ 8 сигнал переключения, по исполнении которого система возвращается в исходное состояние. Процесс по- .вторяется, как только очередной сотрудник увидит зеленый сигнал блокаиндикацииЧастота следования сотрудников определяется временем их...
Плавно переменный поглощающий аттенюатор на плоскостной линии с коаксиальным входом и выходом для метровых и дециметровых волн

Номер патента: 139345
Опубликовано: 01.01.1961
Авторы: Гостинцев, Исаев, Селивановский
МПК: H01P 1/22
Метки: аттенюатор, волн, входом, выходом, дециметровых, коаксиальным, линии, метровых, переменный, плавно, плоскостной, поглощающий
...1 изобра 5 кеця схема включения; ца фиг, 2 - конструкция аттенюатора в двух проекциях.Края плоской поглощающей пластины 1 укреплены в наружном проводнике 2 плоскостной линии. Передняя кромка 3 поглощающей пластины соединена с центральным проводнцдм ет об Пля тор н входох вых во т ичен 1 шения но-переменный а плоскостнойи выходом чл ш, от,2 и ча 1 о щ пи я раоочего Чн согласовац 1151 с поглоща ющнилинии с коакметровы; и дся тем, что, с цназона частотрактом, в не аттецюаиальн цпметроелью увеи улуч в качеПЛАВНО-ПЕРЕМЕННЫЙ НА ПЛОСКОСТНОЙ ЛИН И ВЫХОДОМ ДЛЯ МЕТР ев и А, Д. Селивановский ком 4 входного коакснала, а цецтральныи проьодцик 6 выходного коаксналя соединен с пластиной 1 через подвижный контакт 6, расположенный перпендикулярно к...
Устройство для регистрации входа и выхода

Номер патента: 773660
Опубликовано: 23.10.1980
Авторы: Варламов, Дубинин, Подкопаев, Прозоров, Романов, Солдатин
МПК: G07C 9/00
Метки: входа, выхода, регистрации
...блоком 9 контроля на нечет и контрольную сумму, который в свою очередь соединен с блоком 10 памяти емкостью 4 кбайта. Блок 10 памяти соединен с блоком 11 согласования с вычислительной машиной, через который осуществляется передача массива информации на внешнее устройство выводов вычислительной машины. Блок 8 селекции, блок 9 контроля, блок 10 памяти и блок 1 1 согласования с вычислительной машиной подключен к блоку 12 управления, предназначенному для управления всеми операциями передачи информации и выполненному в виде управляемого коммутатора.Между блоками 12 управления и блоком 8 селекции включен блок 13 регистрации времени, предназначенный для подачи кода текущего времени и включения и выключения всего устройства по заранее заданной...
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Предыдущий патент: Устройство для программного управления промышленным роботом
Следующий патент: Устройство для программного управления
Случайный патент: Способ импульсной индуктивной геоэлектроразведки