Линейно-круговой интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 732818
Автор: Куперман
Текст
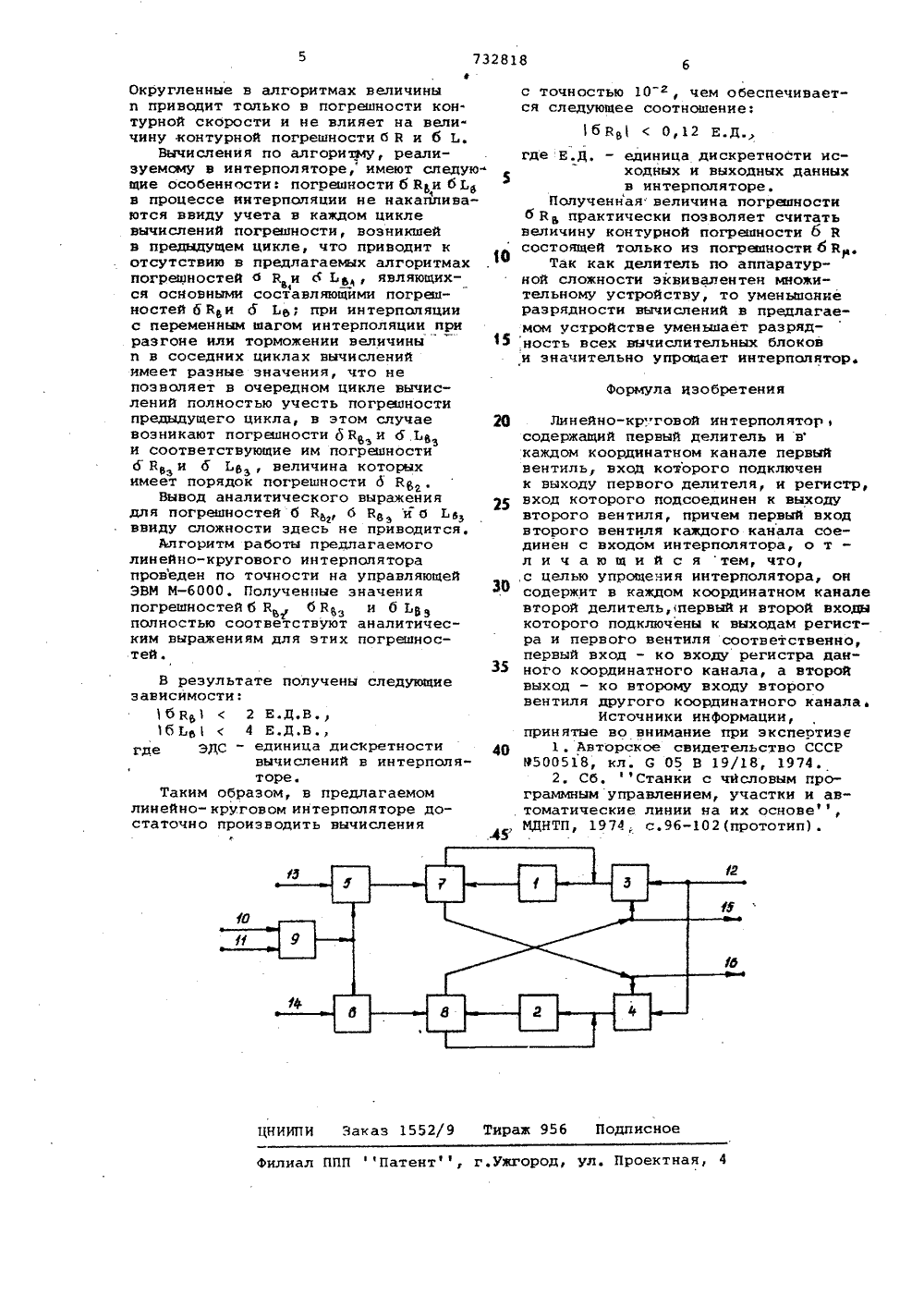
Союз Советских Социалистических Республик(22) Заявлено 20.1277 (21) 2558008/18-24с присоединением заявки Ио(23) Приоритет -С 05 В 19/18 Государствеииый комитет СССР оо делам изобретеиий и открытийл,Хк п, УкиИзобретение относится к автоматическому управлению и предназначено для использования в контурных системах программного управления станками,Известен линейно-круговой интерполятор, построенный на основе цифровых дискретных анализаторов (ЮА) (1).Основной его недостаток - большая разрядность вычислений, определяемая необходимой точностью вычислений. Наиболее близким по технической сущности к изобретению является 15 линейно-круговой интерполятор с большим шагом интерполяции, основанный на интегрировании величин Х и У. Он содержит первый и второй регистры, соединенные соответственно через 2 а первый и второй вентили с первой управляющей шиной, делитель частоты, соединенный со входами третьего и четвертого вентиля, управлиощие входы которых соединены соответст венно с второй и третьей управляющими шинами, первую и вторую вхОдные и выходные шины 2).Устройство в режиме круговой интерполяции реализует в соседних вычислительных циклах поочередно следующие алгоритмы:1) 1 Х; 2) 1 Лп Н и; . Н Х;,= Х; +аХ У= У; +ЬУ;В режиме линейной, интерполяции отсутствует сигнал на первой управляющей шине и на выходные шины поступают соответственно, сигналы у и Х в результате реализации следующего алгоритма: Известное устройство в режиме круговой интерполяции воспроизводится контур окружности с контурной погрешноствю б К,а в режиме линейной интераоляции воспроизводит контур прямойс контурной погрешностью бб.погрешности 6 Я иб Ь измеряются по нормалик интерполируемому,контуру и являются соответственно суммой возникающихв каждом цикле вычислений контурныхшаговых погрешностей б К и б Ь.Погрешность К) й имеет две составляющиег контурную шаговую методическую погрешность б й 1, которая опре-деляется йриближенным характеромформул в алгоритме интерполяций,по которым определяются величиныдх и дУ: контурную шаговую вычислительную погрешность 6 В, котораяопределяется приближенным характером вычислений по Формулам алгоритма интерполяции.Погрешностьб НЬ имеет две составляющие: О ВЬ и о В.Погрешность Гаквозникает при расчете величины 26кх и д У с определенной точностью.Погрешность о йвозникает при использовании в формулах для расчетавеличин д Х и ьХ приближенныхзначений координат Х и Х. Погреш кность о ВЬво много раз больше погрешности б Ви является определяющей в погрешности б й,Для получения допустимой величины погрешности б йк в известномустройстве разрядность вычисленийпревышает разрядность исходныхданных в 2 раза, и вычисления производятся с точностью 10 " . Погреш,ность 6 Ь в отличие от круговойинтерполяции имеет одну составляющую6 ЬЬ, которая состоит только изпогрешностио ЬО,. Необходимая разрядность вычислений при линейнойинтерполяции та же, что и при круговой. 40Цель изобретения - упрощение кон,струкции путем уменьшения разряд,.ности вычислительных блоков.Для достижения цели линейно-круговой интерполятор, содержащий первый делитель и в каждом координатном канале первый вентиль, вход которого подключен к выходу первого делителя, и регистр, вход которого подсоединен к выходу второго вентиля, причем первый вход второго вентиля каждого канала соединен с входом интерполятора, дополнительно содержит в каждом координатном канале второй делитель, первый и второй входы которого подключены к выходам регистра и первого вентиля соответственно, первый выход - ко входу регистра данного координатного канала, авторой выход - ко второму входу 6 второго вентиля другого координат-, ного канала.На чертеже приведена блок-схемаинтерполятора. 65+ ьу; Х.= Х; + ь Х; у,= у; У.1 У + УЩ 1 Х Х+ ХОа в режиме линейной интерполяцииследующий алгоритм:1и = ( - ,)цл; ьх = ( )цХ к 11и;- Х + Х Х н 1 ф н 1 ОО 1.дУ, = ( )ц у = (Хнщ" и) 01.1 УН)м УК 1 + Хост.1 Схема содержит первый 1 и второй 2 регистры, вторые 3 и 4 и первше 5 и 6 вентили, вторите 7 и 8 и первый 9 делители, входы 10 и 11, управляющие шины 12-14, а также выходные шины 15 и 16,Устройство работает следующим образом.На входах 10 и 11 задаются соответственно величины й или Ь, а на выходе делителя 9 формируется величина и( -ф )ц, гце ц - частное при делении нацело. По сигналу с шины 13 на выходе делителя 7 формируется величина д У при круговой интерполяции и д х при линейной интерполяции. С выхода остатка величина ХОш , где ост. - остаток при делении нацело, поступает на регистр 1, где Формируется величина Х; = Х; + Хос, . По сигналу с шины 14 на выходе делителя 8 формируется величиналХ или ьх, а с выхода остатка величина У ,поступает на регистр 2, где формируется величина ун= у + ХОсгТаким образом, в предлагаемом линейно-круговом интерполяторе в режиме круговой интерполяции в соседних вычислительных циклах реализуются следующие алгоритмы:л1)ДХ 1=( "и;)бВ 8) ( 0,12 Е Д.,Формула изобретения Я ЦНИИПИ Заказ 1552/9 Тираж 956 Подписноефилиал ППП Патент, г.ужгород, ул. Проектная, 4 Округленные в алгоритмах величины и приводит только в погрешности контурной скбрости и не влияет на величину контурной погрешности б В и 6 Ь,Вычисления по алгоритму, реализуемому в интерполяторе, имеют следую" щие особенности: погрешности 6 Ви б Ь5 в процессе интерполяции не накапливаются ввиду учета в каждом цикле вычислений погрешности, возникшей в предыдущем цикле, что приводит к отсутствию в предлагаемых алгоритмах погрешностей б В и 6 Ьь, являющихся основными составляющими погрешностей б Ви о Ьв 1 при интерполяции с переменным шагом интерполяции при разгоне или торможении величины- 15 и в соседних циклах вычислений имеет разные значения, что не позволяет в очередном цикле вычислений полностью учесть погрешности предыдущего цикла, в этом случае 20 возникают погрешности о В и 6.Ьз З и соответствующие им погрешности б В и б ЬВ , величина которых имеет порядок погрешности б В 8Вывод аналитического ныражейия для погрешностей б Вь б Вз и б ьв ввиду сложности здесь не приводится.Алгоритм работы предлагаемого линейно-кругового интерполятора проведен по точности на управляющей ЭВИ И. Полученные значения ЗО погрешностей б В б В и б Ьрз полностью соответствуют аналитическим выражениям для этих погрешностей. В результате получены следующие зависимости:)6 Ь)4 Е.Д.В.,где ЭДС - единица дискретностивычислений н интерполторе.Таким образом, в предлагаемом линейно- круговом интерполяторе достаточно производить вычисления с точностью 10 , чем обеспечивается следующее соотношение: где Е.Д. - единица дискретности исходных и выходных данныхв интерполяторе.Полученная величина погрешности б Вь практически позволяет считать величину контурной погрешности б В состоящей только из погреаности 6 ВТак как делитель по аппаратурной сложности эквивалентен множительному устройству, то уменьшение разрядности вычислений в предлагаемом устройстне уменьшает разрядность всех вычислительных блоков и значительно упрощает интерполятор,Линейно-кр ганой интерполяторсодержащий первый делитель и вкаждом координатном канале первыйнентиль, вход которого подключенк выходу первого делителя, и регистр,вход которого подсоединен к выходувторого вентиля, причем первый входвторого вентиля каждого канала соединен с входом интерполятора, о т -л и ч а ю щ и й с я тем, что,,с целью упрощения интерполятора, онсодержит в каждом координатном каналевторой делитель,первый и второй входыкоторого подключены к выходам регистра и первого вентиля соответственно,первый вход - ко входу регистра данного координатного канала, а второйныход - ко второму входу второговентиля другого координатного канала.Источники информации,принятые но внимание при экспертизе1. Авторское свидетельство СССР9500518, кл. 6 05 В 19/18, 1974.2, Сб, фСтанки с числовым программным управлением, участки и ав. томатические линии на их основе,ИДНТП, 1974. с.96-102(прототип).
СмотретьЗаявка
2558008, 20.12.1977
ПРЕДПРИЯТИЕ ПЯ Г-4086
КУПЕРМАН БОРИС МОИСЕЕВИЧ
МПК / Метки
МПК: G05B 19/4103
Метки: интерполятор, линейно-круговой
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/3-732818-linejjno-krugovojj-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Линейно-круговой интерполятор</a>
Фиксатор уколов при фехтовании на рапирах и шпагах

Номер патента: 745528
Опубликовано: 05.07.1980
Авторы: Иванов, Краюхин, Мармузов, Пичугин
МПК: A63B 69/02
Метки: рапирах, уколов, фехтовании, фиксатор, шпагах
...давления) . Судейский регистратор 1 содержит два канала А и Б, каждый иэ которых включает декодирующее устройство 14, частотный дискриминатор 15, соответственно второй 16, третий 17, четвертый 18 Формирователи, схему 19 ИЛИ, первую 20 и вторую 21 схем задержки, первый 22 и второй 23 вентили, инвертор 24 и блок 25 ийдикации.Первый выход канала 13 свйзи ч 6 рез частотный дискриминатор 15 соединен со вторым 16, третьим 17 формировате лями. Выход второго формирователя 16 соединен со входом первой схемы 20задержки и одним входом схемы 19 ИЛИ,второй вход которой подключен к вы,ходу третьего формирователя 17. Выход схемы 19 ИЛИ соединен через вторую схему 21 задержки с сигнальнымвходом второго вентиля 23, второй управляющий вход которого...
Устройство для проверки датчиков угловых и линейных величин

Номер патента: 478348
Опубликовано: 25.07.1975
Авторы: Народицкий, Сафонов
МПК: G08C 25/04
Метки: величин, датчиков, линейных, проверки, угловых
...датчика, чем обеспечиваетсяотносительно высокое значение сигналасуммарной ошибки и простота его расшифровки, а в результате повышается точностьпроверки. 18-24 (51) М, Кл.008 с 25/04слагаемое вквадратных скобках пропорцио;нально ошибке проверяемого датчика; второе - паразитный сигнал, обсуловленный неидентичностью датчиков и погрешностью редуктора. бПолученный сигнал переменного тока преобразуется в постоянный в фазочувствительном блоке и регистрируется в регистрирующем блоке 21.Датник меток используется для масшта- ц бирования погрешности по ф или служит командным устройством для регистрирующего блока.Поворотный механизм необходим для оценКи погрешности, вносимой эталонным 5 датчиком. Для этого может производиться съем...
Прибор для измерения линейных величин

Номер патента: 696266
Опубликовано: 05.11.1979
МПК: G01B 3/22
Метки: величин, линейных, прибор
...и пс 25цилиндрической форде 1, 5 сцользовдние Вт 5 рого отсчстцого устройства совместно срычагом, имеютцим пгтавцо регулируемоеплечо, и пеРвым отсчетшдтм УстРойствомЗОобеспечивает возмок ность настройки и",бора с высокой степенью точности, це здвисян 1 ей от точности изготовления. плечизмерительного рычага, Это постигаетсяконтролем величины коэффициента воспроизведеция путем сопоставления показаний35первого и второго отсчетных устройств..Па фиг. 1 изображен етрибо) пля измерения линейных величин, общий вид; нафиг, 2 - установка контролируемой лета 40ли ца базируОшей приздле.Прибор содержит корпус 1, измерительный рычаг 2, отсчетное устройство3 со сквозньтдл измерительньем стержнем4, базирующуО призму 5, эксцентриковуквтулку 6,...
Устройство для вычисления процентного отношения двух величин

Номер патента: 1335986
Опубликовано: 07.09.1987
Авторы: Иванов, Чулошников
МПК: G06F 7/52
Метки: величин, вычисления, двух, отношения, процентного
...импульс, С учетом сказанного, можно записать равенство, определяющее зависимость между коли чеством импульсов, поступивших на вход блока 17 и снимаемых с его выхода, в виде При этом процесс поступления импульсов с выхода генератора 1 через элемент И 2 и импульсов переполнения через элемент И 3 будет продолжаться до тех пор, пока на вход счегчиковК9 и 10 не поступит А 2 импульсов. В течение этого времени элементом И 6 будет А раз зафиксирован "нулевой код" в счетчике 9 и столько же раз появится импульс на его выходе переполнения. В момент завершения вычиктания А 2 импульсов на выходах элементов И 6 и И 7 фиксируются уровни логических единиц и срабатывает элемент И-НЕ 8. Перепад из единицы в ноль на выходе элемента И-НЕ 8 приводит к тому,...
Устройство для вычисления показательной функции
Номер патента: 1536376
Опубликовано: 15.01.1990
Автор: Пуховицкий
МПК: G06F 7/556
Метки: вычисления, показательной, функции
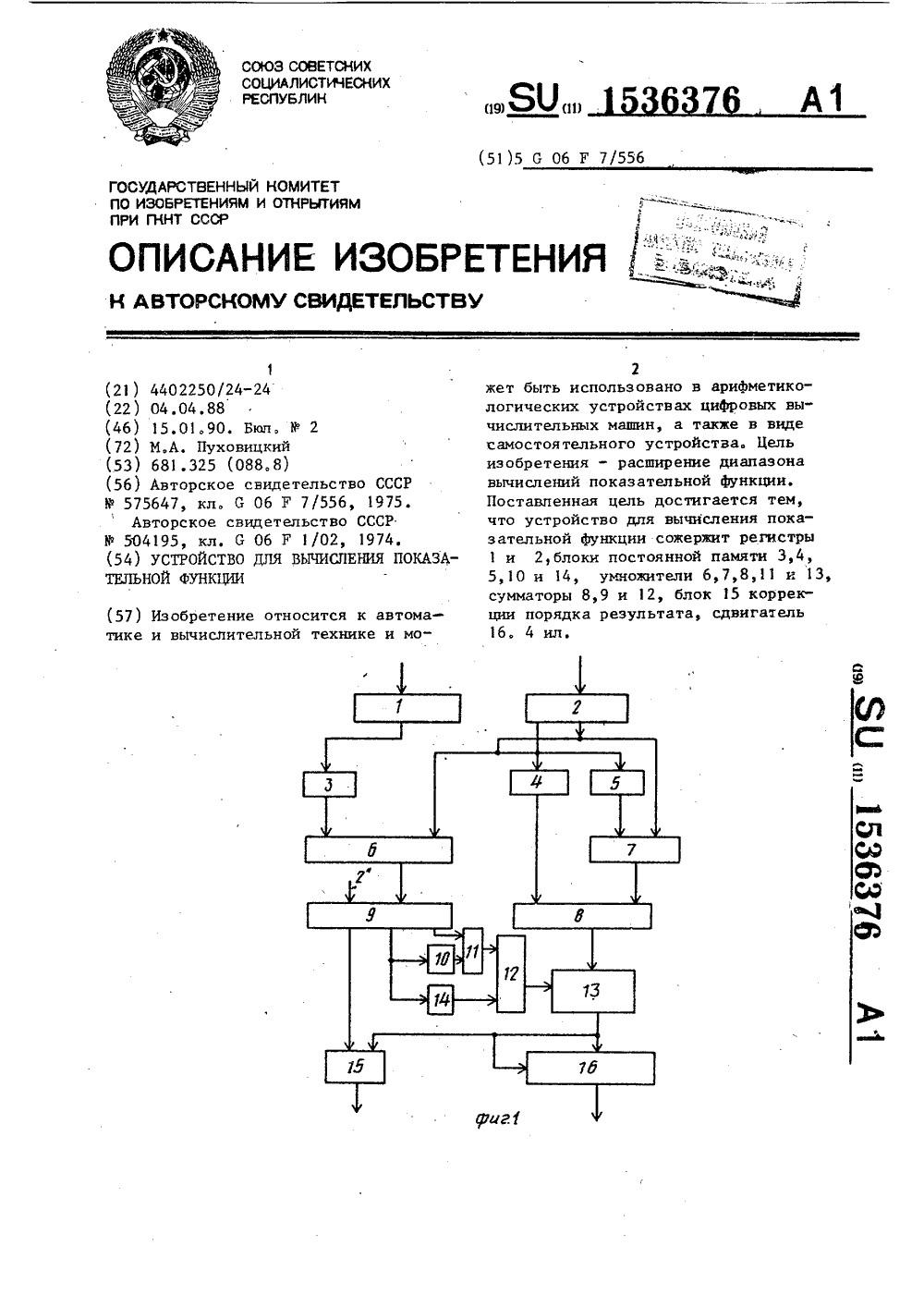
...числа рразбит наодинаковых отрезков и привычислении величины,р Р произ водит.ся замена кривой рМ прямолинейнымот% Ф55 резком в каждом диапазоне(р 3 рР.1(17) 40 15 50 55 Величина рЯ) выдается из пятогоблока 14 постоянной памяти, величинаВфэР) ф- РЗР 32:2М.Ряр - 1 я 6выдается из четвертого блока 10 постоянной памяти, умножение величины1 р 1 о1536 ф)5 Р)на величину 6 производится в умноЖжителе 11, а окончательное сложение -в сумматоре 12, на выходе которого,Формируется величина р 1 Р, В четвертомумножителе 13 Формируется произведение рО р( ). В блоке 15 коррекциипорядка результата и в сдвигателе 16происходит окончательная нормализациярезультата вычисления показательнойфункции.Погрещность вычисления величиныДр складывается из...
Предыдущий патент: Устройство для числового программного управления
Следующий патент: Позиционная система программного управления промышленным роботом
Случайный патент: 162930