Позиционная система программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
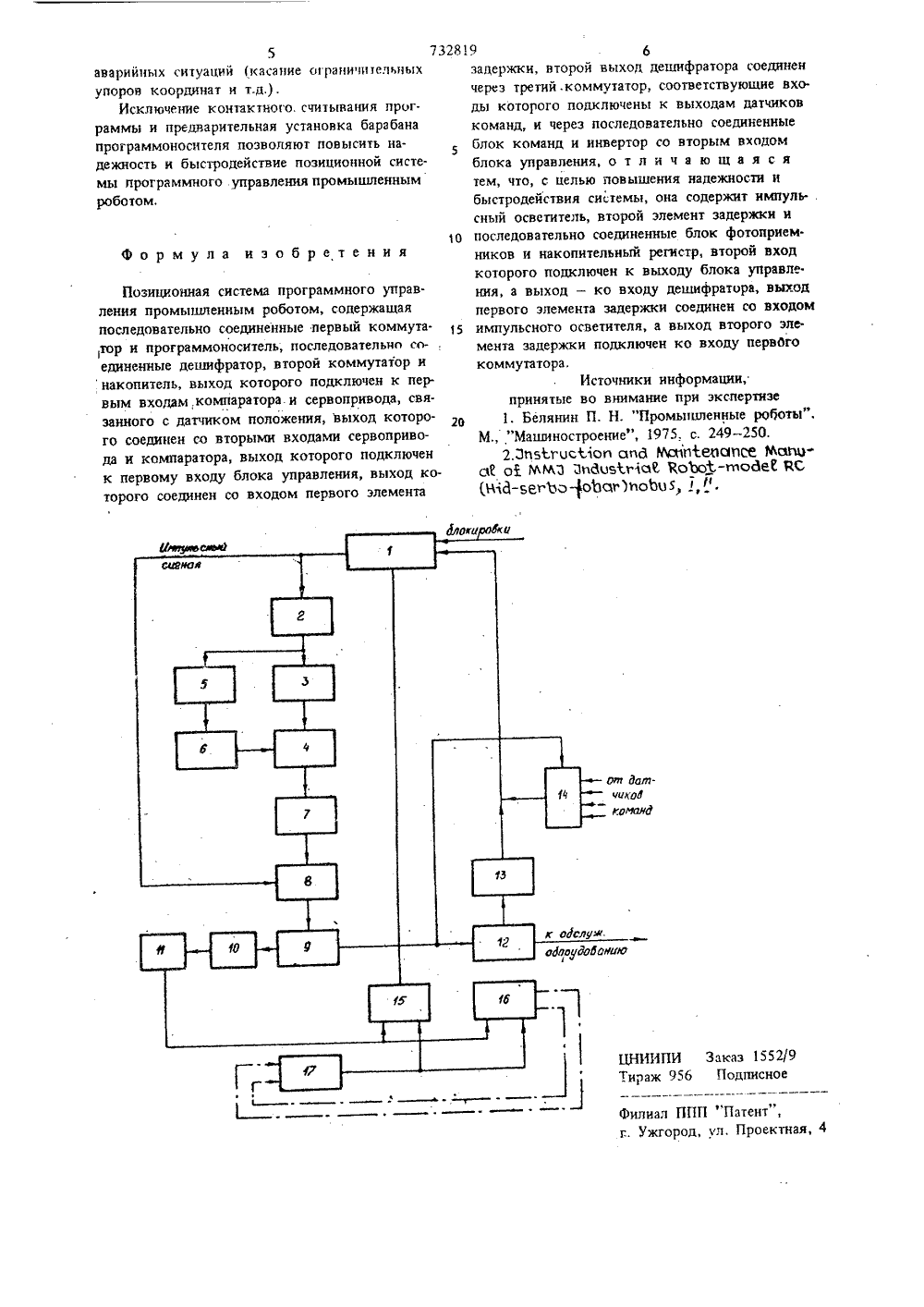
(51)М. Кл. 6 05 В 19/40 В 25 3 9/00Гфсударстваеый квинтет СС СР аа делам изобретений к открытиЯ(54) ПОЗИЦИОННАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЬЫЛЕННЫМ РОБОТОМ Изобретение относится к робототехнике и может быть использовано при создании позиционных систем управления промышленными роботами.Известны позиционные системы программного управления промьппленнымроботом, содержащие программоноситель, коммутатор кадров, потенциометрический накопитель, блок команд, комларатор, сервопривод и датчик положения, имеющие низкие надежность и быстродействие, обусловленные применением в качестве програм. монакопителя штекерного барабана 111.Наиболее близким техническим решением к изобретению является система, содержащая последовательно соединенные коммутатор кадров и программоноситель, последовательно соединенные дешифратор, коммутатор накопителя и потенциометрический накопитель, выход которого подключен к первым входам компаратора и сервопривода, связанного с датаком положения, выход которого соединен со вторыми входами сервопривода и компаратора, выход которого подключен к первому входу блока управления, выход которого соединен со входом первого элемента задержки, второйвыход дешифратора соединен через коммутаторкоманд, соответствующие входы которого под.ключены к выходам датчика команд. и черезпоследовательно соединенные блок команд иинвертор со вторым входом блока управления т 2).Недостаток системы - низкая надежностьвызванная использованием в качестве программоносителя штекерных панелей и барабанов тО с контактным считыванием программы. В слу.чае использования в качестве программоносителя штекерного барабана сигнал на его разворот подается только после выполнения работы предыдущего шага программы, что снижает быстродействие системы.Цель изобретения - повышение надежностии быстродействия системы.Поставленная цель достигается тем, что си.стема содержит импульсный осветитель, вто.20рой элемент задержки и последовательно соединенные блок фотоприемников и накопительньв регистр, второй вход которого подключен к выходу блока управления, а выход3 7328ко входу дешифратора, выход первого элемента заяержки соединен со входом импульсногоосветителя, а выход второго элемента задержки подключен ко входу коммутатора кадров.На чертеже представлена функциональнаясхема системы,Система включает блок 1 управления, первый элемент 2 задержки, импульсный осветитель 3, программоноситель 4, второй элемент 5задержки, первый коммутатор 6, блок 7 фотоприемников, накопительный регистр 8, дешиф.ратор 9 кадра, второй коммутатор 10, нако-,питель 11, блок 12 команд, инвертор 13, третий коммутатор 14, компаратор 15, сервопривод 16 координат, датчик 17 положения,15Система работает следующим образом,Считывание кадра программы, записаннойна программоносителе 4 происходит в моментподачи сигнала, сформированного в блоке 1 уп.равления, через первый элемент 2 задержки навход импульсного осветителя 3. Световой поток, создаваемый импульсным осветителем, проходя через отверстие в строке программоносителя 4, преобразуется в электрические сигналына выходе блока 7 фотоприемников, Мощностьэлектрических сигналов зависит от величинысветового потока и чувствительности фотоприемников, длительность сигналов пропорциональ.на длительности светового потока.С выхода блока 7 фотоприемников импуль.сные сигналы поступают в накопительный регистр 8, на выходе которого образуется код.кадра программы в виде уровневых сигналов.,Начальная установка накопительного регистра 8осуществляется сигналом, поступающим с выхода блока 1 управления на управляющий входрегистра 8. Элемент 2 задержки на входе им.лульсного осветителя 3 обеспечивает необхо.димый сдвиг между фазами начальнойустацовгки и записью программы в накопительном регистре 8. Установка последующего кадра программы осуществляется сигналом, поступающимс выхода первого коммутатора 6, который сдвинут по времени относительно сигнала, поступа.ющего на вход импульсного осветителя 3.Необходимая величина сдвига зависит отвремени считывания установленного кадра иобеспечивается вторым элементом 5 задержки,Выполнение считанного кадра программыосуществляется параллельно: отрабатываютсяперемещения по координатам манипулятораи технологические команды. Для этого на вы.ходе накопительного регистра 8 включен дешиф.ратор 9 кадра, на одном из выходов которогообразуется единичный код, соответствующийномерам потенциометров, которые должны бытьвключены в потенциометрическом накопителе11 посредством второго коммутатора 1 О, Надругом выходе дешифратора 9 кадра образует 19 4сн единичный код, соответствующий номерутехнологической команды, которая должнабыть включена в блоке 12 команд.Любой кадр программы должен содержатьинформацию о перемещениях по всем коорди,натам манипулятора, включая те, перемещениепо которым в данном кадре не происходит.По этим координатам программируетсяномер потенциометра, записанного в предыдущем кадре. Отсутствие такой информациивоспринимается как ошибка программирования,В момент включения потенциометров в накопителе 11 на входе компаратора 15 и сервопривода 16 координат образуется разность сиг.налов, поступающих с. выходов лотенциометрови соответствующих датчиков 17 положения.При этом на выходе компаратора 15 разрешающий сигнал на считывание очередного кадраотсутствует до тех пор, пока на его входене будет достигнуто совпадение указанныхсигналов по всем подвижным координатам,В этот моментперемещение по всем коорди.натам отсутствует.Если в данном кадре запрограммированномер технологической команды, то по сиг.налу с дешифратора 9 кадра в блоке 12 ко.манд включается один из тиристорных ключей,соответствующий номеру команды.Сигнал с его выхода поступает на обслуживаемое оборудование или манипулятор дляуправления релейной электроавтоматики послед.них. Выполнение каждой команды контролируется соответствующими датчиками, установленными на оборудовании. Для этого одновременно с включением команды в блоке 12 команд пропадает разрешающий сигнал на входеустройства управления, а коммутатор 14 команд на вход которого подается сигнал с выхода дешифратора 9, подключаетк этомувходу блока 1 управления выход с датчика,соответствующего номеру команды.Таким образом, разрещающий сигнал навход блока 1 управления подается с выходауказанного датчика команд в тот момент,когда команда выполнена, В противном случае сигнал на считывание очередного кадра неформируется,При отсутствии технологических команд в программе сигнал с выхода дешифратора 9 на блок 12 команд отсутствует, датчики команд отключены и разрешающий сигнал на вход блока 1 управления поступает с выхода инвертора 13.Считывание очередного кадра и установка последующего происходит при наличии разре. шающих сигналов на всех входах блока 1 уп. равления включая вход блокировки, на кото. ром исчезает разрешающий уровень в моментФилиал ППППатент, . Ужгород, ул. Проектн 5 73281 аварийных ситуаций 1 касание ограничителщых упоров координат и т.д,),Исключение контактного. считывания программы и предварительная установка барабана программоносителя позволяют повысить на 5 дежность и быстродействие позиционной системы программного, управления промышленным роботом. 1 ОФормула изобретения Позиционная система программного управления промышленным роботом, содержащая последовательно соединенные первый коммута. тор и программоноситель, последовательно соединенные дешифратор, второй коммутатор и накопитель, выход которого подключен к первым входам компаратора и сервопривода, связанного с датчиком положения, выход которого соединен со вторыми входами сервопрнвода и компаратора, выход которого подключен к первому входу блока управления, выход которого соединен со входом первого элемента 9 6задержки, второй выход дешифратора соединенчерез третий. коммутатор, соответствующие вхо.ды которого подключены к выходам датчиковкоманд, и через последовательно соединенныеблок команд и инвертор со вторым входомблока управления, о т л и ча ю ща я с ятем, что, с целью повышения надежности ибыстродействия системы, она содержит импуль- .сный осветитель, второй элемент задержки ипоследовательно соединенные блок фотоприем.ников и накопительныи регистр, второй входкоторого подключен к выходу блока управле.ния, а выход - ко входу дешифратора, выходпервого элемента задержки соединен со входомимпульсного осветителя, а выход второго эле.мента задержки подключен ко входу первОгокоммутатора,Источники информации,принятые во внимание при экспертизе1. Белянин П. Н. "Промышленные роботы",М "Машиностроение", 1975, с. 249-250.2.Эий,гцстлоп апд Мдч 11 еоОПСЕ МсвцсК о ММ 3 ЭидиМз 1 аС Ко 1 эоС-юойег, ЯСНъ 3-ьеп 1 я-ооаг 1 иоЬо 5,
СмотретьЗаявка
2550754, 01.12.1977
ПРЕДПРИЯТИЕ ПЯ Р-6930
КНАУЭР ИГОРЬ БОРИСОВИЧ, АГАПОВ АНАТОЛИЙ НИКИФОРОВИЧ, ЗВЕРЕВ МИХАИЛ МИХАЙЛОВИЧ, СКРИПКА ЮРИЙ ВАСИЛЬЕВИЧ, ГЛЕЙЗЕР ЛЕОНИД ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 19/40
Метки: позиционная, программного, промышленным, роботом
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/3-732819-pozicionnaya-sistema-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Позиционная система программного управления промышленным роботом</a>
Устройство для приема телеметрической информации

Номер патента: 1008763
Опубликовано: 30.03.1983
Автор: Грубов
МПК: G08C 19/28
Метки: информации, приема, телеметрической
...символов соединен с входом блока выделения маркера информационного слова и входом блока выделения маркера кадра, выход которого соединен с входом хронизатора и первым входом первого элемента ИЛИ, выход которого соединен с первым входом триггера, выход триггера соединен с первым входом элемента НЕ, выход которого соединен с первым входом преобразователя. последовательного кода в параллельный, выходы которого соединены с первыми входами дешифратора номера канала, выходы хронизатора соединены с вторыми входами преобразователяпоследовательного кода в параллель- на, теперь начинает поступать посный и дешифратора номера канала, ледовательный информационный код данэлемент задержки и элементы И, выхо- ного канала, Кроме того, импульсныйды...
Способ задержки телевизионного сигнала и устройство для осуществления способа

Номер патента: 768008
Опубликовано: 30.09.1980
МПК: H04N 5/02
Метки: задержки, сигнала, способа, телевизионного
...коммутаторами 2 и 3 в блоки 5 и 6 памяти на ЗЭЛТ. Команды с блока 10 управления подаются на электронные коммутаторы 2 и 3 таким образом, чтобы записываемые в блоках 5 и 7 памяти на ЗЭЛТ смежййе зоны видеосигнала имели необходимыйучасток перекрытия во времени. Для записи сигнала каждой зоны используют всюмишень ЗЭЛТ. Для этого блоки 5 и 6 памяти на ЗЭЛТ имеют свой закон развертки,а именно; длительность прямого хода развертки должна быть равна зоне, записываемой в этот блок, обратный ход может занимать остальную часть периода видеосигнала. 4Чтобы увеличить горизонтальную четкость задержанного изображения, видеосигнал разбивают на перекрывающиеся зоны по строке и соответствующим образом изменяют горизонтальную развертку блоков 5 и 6...
Устройство для задержки телевизионного сигнала

Номер патента: 750754
Опубликовано: 23.07.1980
Авторы: Безруков, Беляев, Комаров, Малочинская
Метки: задержки, сигнала, телевизионного
...которую необходимо задержать, на блок 3. С выходаблока 3 сигнал выборки поступает на формирователь сигнала записи 4.Преобразованныйк виду, необходимому для записи, сигналс выхода формирователя сигнала записи 4поступает на второй вход двухтрубочной телевизионной камеры 5 непосредственно, а натретий вход - через усилитель.инвертор 6. Вусилителе-инверторе б осуществляется переворот фазы сигнала записи на 180 .Поданные на двухтрубочную телевизионнуюкамеру 5 сигналы в соответствии с сигналомуправления, поступающим на первый входдвухтрубочной телевизионной камеры 5 счетвертого выхода формирователя 1, записываются на фотопроводящий слой мишени видикона. В периодах записи и считывания сиг.калы из двухтрубочной телевизионной камеры5...
Регулируемая линия задержки телевизионного сигнала

Номер патента: 1665547
Опубликовано: 23.07.1991
МПК: H03H 11/26, H04N 9/00
Метки: задержки, линия, регулируемая, сигнала, телевизионного
...длина ПЗС 6 выбирается равной макси- а блоке 17 памяти устанавливается черезмальнойтребуемойдополнительной задержке мультиплексор 16 от внешнего управления.в устройстве, а требуемая дополнительная эа Ф о р и у л а и з о б р е т е н и ядержкавустройствеменьшефактическойдли, Регулируемая линия задержки телены ПЗС 6. Рассмотрим режим (фиг.5 а). визионногосигнала, содержащаягенераторТактирующие импульсы проходят на ПЗС 1 на тактов, формирователь тактовых импульсов,ПЗС 6 они не проходят), коммутатор 9 переда- выходы которого соединены с первыми вхоетнавыходинформациюА 1.0 дновременнона 15 дами прибора с,".арядовой связью, второйвход ПЗС 1 записывается информация А 2. В вход которого является входом регулируеПЗС 6 хранится необходимая...
Устройство для задержки аналогового сигнала

Номер патента: 266372
Опубликовано: 01.01.1970
Автор: Арховский
МПК: G06G 7/02
Метки: аналогового, задержки, сигнала
...8 и 9, триггер 10 и генератор 11 - схему зазержки тактовых фронтов, Триггер 12 форм ируег задержанный широтно-импульсный сигнал по двум сериям импульсов.Задержка широтно-импульсного сигнала на заданный период тз осуществляется следуошим образом.Дифференцированне импульсы широтно- импульсного сигнала, соответствующие измортельным фронтам, с диода 2 запускают па. раллельно соединенные одновибраторы 66. Вентили 4, - 4, в исходном состоянии закрыты, а вентили 5 - 5 -- открыты. Первый имГльс запускает первый одновиоратор, который закрывает свой вентиль 5, - 5 и открывает вентиль 4; - 4, и т. д. С выходов одновибраторов 6- - 6 схема сборки 7 собирает дифференцированные задержанные на период т;-, импульсы измерительных фронтов.С диода 8...
Предыдущий патент: Линейно-круговой интерполятор
Следующий патент: Устройство для функционального контроля систем управления
Случайный патент: Состав для клеймения металлических деталей