Манипулятор с программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 688329
Автор: Ермаков

Текст
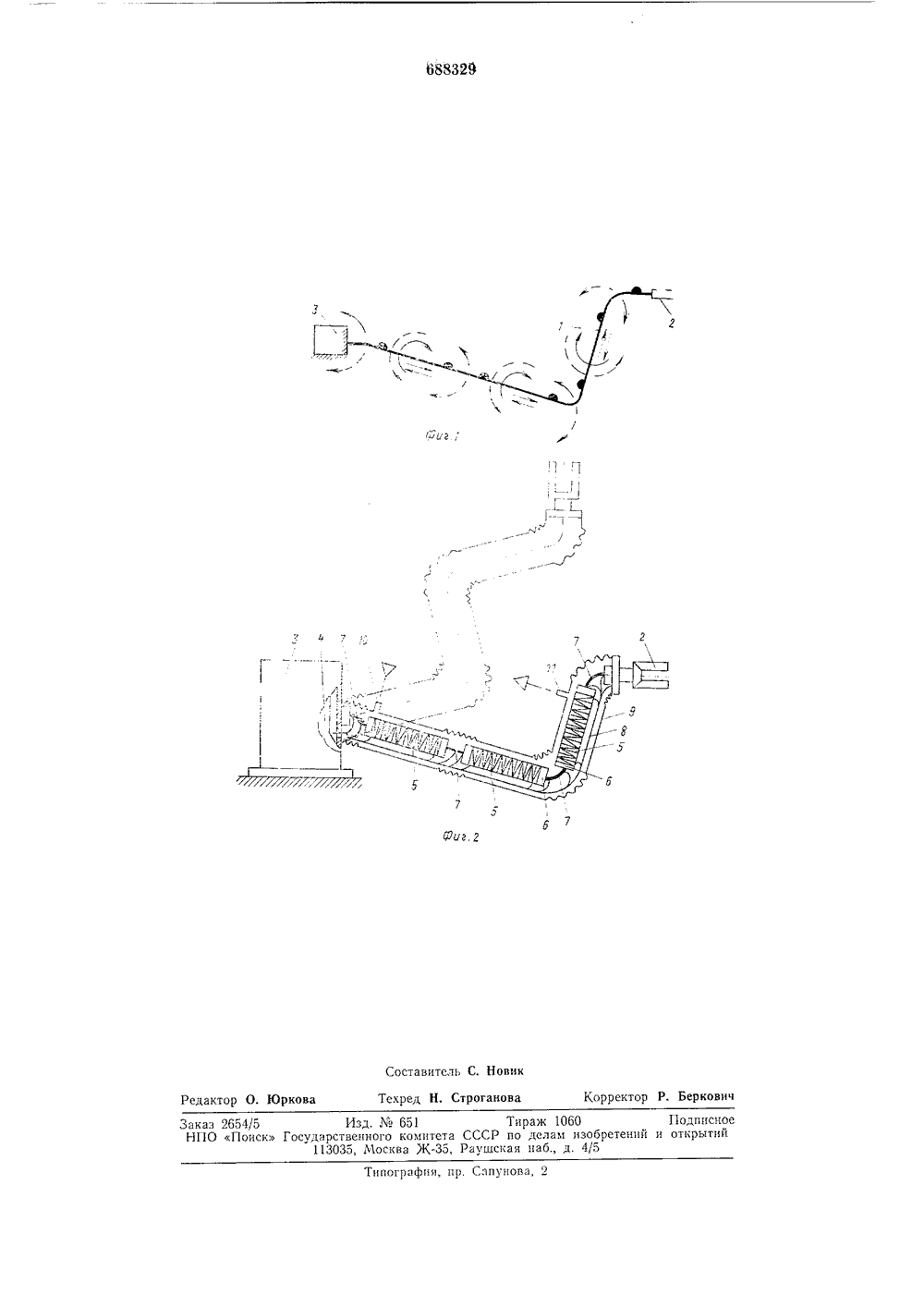
союз Советскик Социалистических РеспубликК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 61) Дополнительное к авт. свид-ву22) Заявлено 04.04.78 (21) 2599338/25-0 51) М. КлВ 253 9/00В 251 15/00 с присоединением заявки Государстееннын комитет(23) Приорпте 53) УД 43) Опубликовано 30.09,79. Бюллетень М 3 45) Дата опубликования описания 30.09,79-229.7288.8) ло делам изобретении н открытий(54) МАНИПУЛ Манипулятор с программным управлением содержит мцогозвсцную механическую руку 1, которая снабжена захватом 2 и связана с основанием 3, несущим блок уп равленця 4. Механическая рука 1 содержиттри нагрсвасмых приводных элемента 5, которые последовательно соединены через элсктроцзолятор 6 с нагрсвасмыми приводными элемсцтамц 7, например, с помощью 10 рсзьбовых соединений (не показаны). Приводные элементы 5 и 7 выполнены из электропроводного термочувствительного материала, обладающего свойствами памятц формы, т. с. свойствами многократного об ратного изменения формы прц многократном пов торсши 1 циклов нагрева - охлаждения, например, цз титано-никелевого сплава (54 - 5 б% цикеля, остальное - титан), и электрически связаны проводами 20 8 с блоком правления 4.Мсхяццчсскяя р 1 ка 1 заключена В эластичный рукав 9 цз электроцзоляционного материала, например, из резины, гофрированной в местах расположения приводных 25 элементов 7. Эластичный рукав 9 имеетштуцер 10 для ввода и штуцер 11 для вывода охлажда;ошсго воздуха.Нагреваемый приводной элемент 5 выполнен цз двух лент тцтано-никелевого 30 сплава, переплетенных поочерсдцыми заожц Изобретение относится к ооласти манипуляторов с программным управлением, имеющих агрегатированные с ними приводы управления, и может быть использовано в различных отраслях машиностроения и приборостроения.Известен манипулятор с программным управлением, содержащий основание, многозвенную механическую руку со схватом и систему управления 11.Известный манипулятор имеет сл о конструкцию.Цель изобретения - упрощение конструкции манипулятора.Для этого в предлагаемом манипуляторе каждое звено механической руки выполнено в виде приводного элемента, приводные элсмснты соединены между собой последовательно через изоляторы и заключены в эластичный рукав, содержащий устройства ввода и вывода охлаждающей среды, причем каждый приводной элемент выполнен из элсктропроводного тсрмочувствительного материала, обладаощсго свойством памяти формы, например титано-никелевого сплава, и электрически связан с системой управления.На фиг. 1 изображена кинематическая схема предлагаемого манипулятора; на фиг. 2 - манипулятор, частичный разрез. Н И Е 688329гибами друг на друга во взаимно перпенди. кулярных направлениях и образующих жесткую металлическую гармошку, срабатывающую (изменение длины с одновременным вращением) при изменении температуры (нагрев, охлаждение).Нагреваемый приводной элемент 7 выполнен из прямой или изогнутой пластины титано-никелевого сплава, срабатывающей (изгиб или выпрямление) при изменении температуры (нагрев, охлаждение).Нагрев и охлаждение приводных элементов 5 и 7 обеспечивается по программе от блока управления 4 путем подвода или отключения электрического тока. Ускоренное охлаждение обеспечивается подводимым к рукаву 9 охлаждающим воздухом.Манипулятор с программным управлением работает следующим образом.По заданной программе от блока управления 4 подается электропитание к соответствующему приводному элементу 5, который, нагреваясь до температуры выше 60 С, срабатывает, осуществляя перемещение вдоль его продольной осп в сторону захвата 2,При подаче электропитания к соответствующему приводному элементу 7 и при нагреве его до температуры выше 60 С осуществляется относительный поворот смежного с ним приводного элемента 5 (со стороны захвата 2). При этом захват 2 занимает соответствующую программе позицию,При отключении электропитания соответствующих приводных элементов 5 и 7 и охлаждении их воздухом до температуры ниже 40 С все движения приводных элементов 5 и 7 происходят в обратном порядке и в противоположных направлениях, а захват 2 5 занимает первоначальное позиционное положение.Механическая рука 1 при этом имеет достаточное количество степеней свободы, обеспечивая широкую область манипулпро О ванин.Формул а изобретения1. Манипулятор с программным управлением, содержащий основание, многозвен 15 ную механическую руку со схватом исистему управления, отличающийся тем,что, с целью упрощения конструкции, каждое звено механической руки выполнено ввиде приводного элемента, приводные эле 20 менты соединены между собой последовательно через изоляторы и заключены в эластичный рукав, содержащий устройстваввода и вывода охлаждающей среды, причем ка)кдый приводной элемент выполнен25 из электропроводного термочувствитсльного материала, обладающего свойством памяти формы и электрически связан с системой управления.2. Манипулятор по и. 1, о тл и ч а ю щ и й:.10 ся тем, что приводные элементы выполнены из титано-никелевого сплава.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРМ 510362, кл. В 253 9/00, 1976.Заказ 2654/5 Изд. М 651 Тираж 1060 Подписно НПО Поиск Государственного комитета СССР по делам изобретений и открытий 113035, Москва Ж, Раушская иаб., д. 4/5 Типография, пр. Сапуо
СмотретьЗаявка
2599338, 04.04.1978
ПРЕДПРИЯТИЕ ПЯ В-2946
ЕРМАКОВ ЮРИЙ ГЕОРГИЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
Опубликовано: 30.09.1979
Код ссылки
<a href="https://patents.su/3-688329-manipulyator-s-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор с программным управлением</a>
Автоматический манипулятор с программным управлением

Номер патента: 906684
Опубликовано: 23.02.1982
Авторы: Корендясев, Пурцеладзе, Рукин, Саламандра, Столин, Тывес
МПК: B25J 1/00
Метки: автоматический, манипулятор, программным, управлением
...На чертеже изображена блок-схемаавтоматического манипулятора с программным управлением и механизмомреализации стереотипных движенийкисти по вертикальным прямым.Автоматический манупулятор содержит программное устройство 1, следящие приводы 2 и 3, состоящие изблоков управления 1 и 5 по скорости и двигателей 6 и 7, механическуюруку, выполненную в виде основания 8, шарнирно соединенных звеньев409 и 10, смонтированную на звене 10кинематицескую передачу 11 для перемещения звена 10 от двигателя 6,синусно-косинусных механизмов 12 и13, соединяемых муфтой 11, управляемой от программного устройства 1,коммутаторов 15 и 16, включающихпо команде от блока 1 блоки управления 1 и 5 по скорости или блоки управления 17 и 18 по моменту.50Ианипулятор...
Манипулятор с программным управлением

Номер патента: 510362
Опубликовано: 15.04.1976
Авторы: Елисеев, Жарков, Рапопорт
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
...координаты 20 и регистра адреса 21, дешифратора 22, соединенного с выходом регистра адреса, преобразователей код-фаза 23, входы которых соединены с регистром коорди наты, а выходы - с соответствующей группойузлов управления 24 активными узлами вращения 7, причем запись в преобразователи код-фаза определяется подсоединенным к ним дешифратором адреса.З 0 Узлы управления 24 объединены в группыпродольного перемещения звена, статического режима удержания звена, бокового перемещения звена, ориентирования последующего звена. Группа продольного перемещения зве на состоит из шести узлов управления, соответствующих четырем сопряженным активным узлам вращения 7 и двум несопряженным активным узлам вращения, Группа статического режима удержания...
Манипулятор с программным управлением
Номер патента: 622665
Опубликовано: 05.09.1978
Авторы: Витушкин, Корбан, Михеенков, Молчанов
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
...ен преД араммныменнуюнесущ 2) Авторы изобретеввй В.л. перемещения звена, Звенья кой руки выполнены сдвоен что одни рычаги работают а другие на изгиб,Недостатком такого устр ется невозможность проведе ных сборочных операций с н ными деталями, что снижает логические возможностиЦель изобретения в . р нологических возможност тора,Для зтого он снабжеподвижно установленнымле захвата, при зтом уП-образным.На чертеже изображ длагаемыйманипулятор, общий виМанипулятор с прог управле"нием включает многозв руку с захватом 1 и основание 2 ее блок управления 3.Каждое звено многозвенной механической руки представляет собой четырерычага 4, соединенные в виде ромба спомощью активных узлов вращения, изкоторых две пары сопряженных узлов 5вращения,...
Манипулятор с программным управлением

Номер патента: 676440
Опубликовано: 30.07.1979
Авторы: Елисеев, Жарков, Касаев, Керин, Рапопорт, Шашкин
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
...например, электромагнитные присоски 8. Блок программного управления 9 соединен с манипулятором при помощи гибкого кабеля 10. На ромоообразном звене 6 может быть установлено от одного до трех захватов 7,Манипулятор работает следующим образом.Электрический сигнал, попадая с блока управления 9 по гибкому кабелю 10 на активные узлы 2 - 5, отключает электромагнитные присоски 8 на активных узлах 3 - 5 вращения, а на активном узле 2 вращения магнитная присоска фиксируется. Электрические двигатели отрабатывают заданную величину перемещения, изменяя тем самым геометрию ромба. После изменения теометрии перемещенная электромагнитная присоска 8 узла 4 фиксируется, а присоска узла 2 отключается и происходит дальнейшее изменение геометрии звена 1...
Манипулятор с программным управлением

Номер патента: 733975
Опубликовано: 15.05.1980
Авторы: Кобринский, Корендясев, Саламандра, Тывес
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
...пружины кручения, выходныезвенья аккумуляторов 29-35, Механизмы реверса 36-42 установлены междувыходными звеньями аккумуляторов икинематическими цепями приводов, вданном случае валами 43-49 двигателей 15-21. Программно-управляемыемуфты 50-56 также установлены междувыходными звеньями аккумуляторов икинематическими цепями приводов.В варианте подключения выходныхзвеньев аккумулятора к кинематичес Оким цепям привода, не содержащим механизма реверса (см.фиг.2), аккумулятор выполнен в виде пружины кручения. Аккумуляторами механическойэнергии могут быть оснащены приводыне всех звеньев, а только наиболеенагруженных, т.е. наиболее инерционных.Манипулятор с программным управлением работает следующим образом,В исходном положении (перед началом...
Предыдущий патент: Привод захвата манипулятора
Следующий патент: Устройство для установки режущих головок
Случайный патент: Высевающий аппарат