Устройство для адаптивного программного управления положением объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
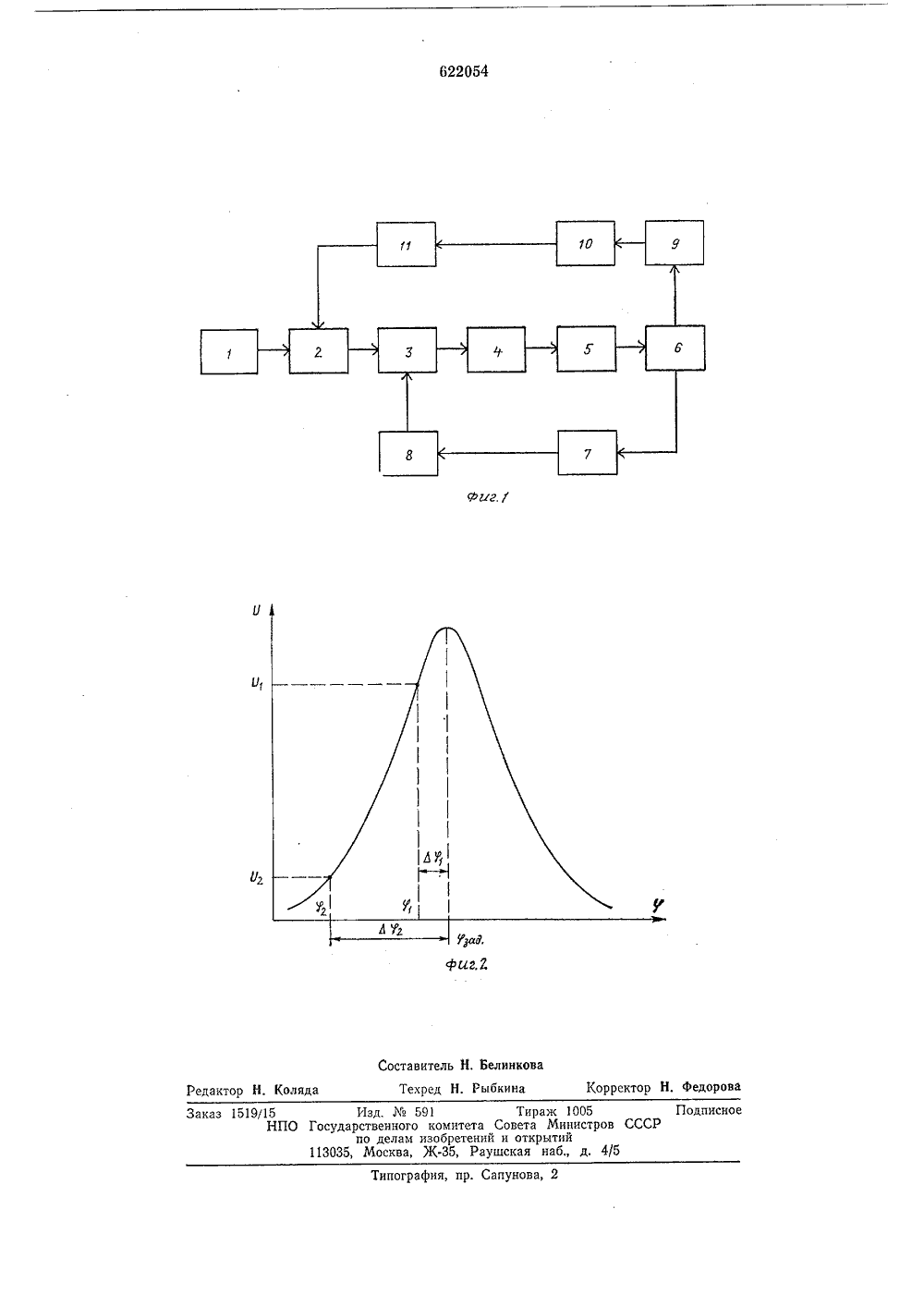
ОЛ ИСАНИЕ ИЗОБРЕТЕН Ия К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ11 Ц 622054 Союз Соввтскнк Содналнстнчсских Республик(43) Опубликовано 30.08.78, Бюллетень32 (45) Дата опубчикования описания 10.08.78 авета Министров СССРо делам изобретений) УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПРОГРАММНОГ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОБЪЕКТАИзобретение относится к области автоматики и вычислительной техники и можетбыть использовано для автоматическогоуправления положением объекта,Известно устройство для автоматического слежения за положением объекта управления 11.Наиболее близким к изобретению техническим решением является устройство, содержащее вычислитель, последовательно 10соединенные блок сравнения, цифроаналоговый преобразователь и следящий привод,последовательно соединенные датчик углаи преобразователь угол в к, подключенный к первому входу блока сравнения 21. 15Однако из-за ошибок, возникающих вфункциональных блоках, это устройство необеспечивает точности, выше десятых угловых минут.Целью изобретения является повышение. 20точности устройства.Цель достигается тем, что в устройствовведены последовательно соединенные датчик экстремума, экстремальный регулятор,аналогоцифровой преобразователь и сумматор, один из входов и выход которого соответственно подключены к выходу вычислителя и ко второму входу блока сравнения.На фиг, 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - график 30 зависимости показателя качества от адаптивного программного углового положения,Устройство (см, фиг, 1) содержит вычислитель 1, сумматор 2, блок сравнения 3, цифроаналоговый преобразователь 4, следящий привод 5, объект управления 6, датчик угла 7, преобразователь угол в к 8, датчик экстремума 9, экстремальный регулятор 10, аналогоцифровой преобразователь 11.Устройство работает следующим образом.Для данного объекта управления зависимость показателя качества от углового положения является экстремальной (фиг. 2) . С выхода вычислителя (например, цифровой вычислительной машины) 1 на первые входы сумматора 2 поступает двоичный код, соответствующий угловому положению объекта управления 6 (р,), в котором показатель качества имеет экстремум максимум. С датчика угла 7 снимается аналоговый сигнал, соответствующий мгновенному значению углового положения объекта управления 6. Преобразователь угол - код 8 обеспечивает преобразование аналоговой величины в цифровую, которая поступает на вторые входы блока сравнения 3, на первые входы блока сравнения 3 поступает код заданного углового положения. С выхода блока сравнения 3 на вход циф 6220543роаналогового преобразоватсля 4 поступает цифровой сигнал разности между заданным (рд) и мгновенным (р) значениями углового положения объекта управления. Аналоговая величина с выхода прсобразо вателя 4 поступает в следящий привод 5, который изменяет угловое положение объекта до тех пор, пока цифровой сигнал рассогласования не будет равен нулю. Это соответствует установке объекта б в заданное 10 угловое положение. Однако блоки, входящие в канал программного управления, в частности, преобразователи 4, 8, датчик угла 7, привод 5 имеют конечную точность. Это приводит к ошибке Лр, в угловом по ложении объекта управления;М = 9 зад 9Ошибка Лр является величиной случайной и может принимать различные значе ния для различных угловых положений и различных условий эксплуатации аппаратуры. Наличие ошибки Ьр, вызывает умень-. шение показателя качества. На выходе экстремального регулятора 10 формируется 25 сигнал, поступающий на вход аналогоцифрового преобразователя 11. Выходной сигнал экстремального регулятора 10 возрастает до момента достижения экстремума. После прохождения экстремума происходит 30 переключение и выходной сигнал уменьшается. При смещении экстремума следу- дующее переключение произойдет после прохождения экстремума, Если положение экстремума не изменяется, на выходе экст- З 5 ремального регулятора устанавливаются автоколебания, постоянная составляющая которых зависит от углового положения экстремума, Выходной сигнал экстремального регулятора 10, преобразованный в 40 двоичный код, поступает в сумматор 2 и складывается с двоичным кодом, поступающим с вычислителя 1, т. е. к основному двоичному коду (с ЦВМ) добавляется корректирующий код. Скорректированный 45 двоичный код поступает на блок сравнения 3 и отрабатывается системой как было описапо выше. В результате этого следящий привод 5 перемещает объект управления 6 в направлении максимума показателя качества.Устройство позволяет снизить требования к точности отдельных блоков и выполнить пх по более простым схемам, Это упрощенно схем повьппает надежность работы устройства, а также уменьшает его стоимость, Применение блоков с более низкой точностью приводит к возникновению большей ошибки, например Ьр9 а: 9 зад 9 зи к существенному уменьшению показателя качества. Однако экстремальный регулятор настраивает объект на экстремум, т.е. в заданное угловое положение. Кроме того, настройка по первому контуру и по второму контуру происходит одновременно. Это значительно повышает быстродействие устройства,Формула изобретенияУстройство для адаптивного программного управления положением объекта, содержащее вычислитель, последовательно соединенные блок сравнения, цифроаналоговый преобразователь и следящий привод, последовательно соединенные датчик угла и преобразователь угол - код, подключенный к первому входу блока сравнения, о тличающееся тем, что, с целью повышения точности устройства, в него введены последовательно соединенные датчик экстремума, экстремальный регулятор, аналогоцифровой преобразователь и сумматор, один из входов и выход которого соответственно подключены к выходу вычислителя и ко второму входу блока сравнения.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР120038, кл. О 05 В 19/18, 1959.2. Авторское свидетельство СССР378808, кл. б 05 В 19/18, 1970.622054 оставитель Н. БелинковаТехред Н. Рыбкина тор Н. Коляд ПодписноСССР Тираж 1005ета Министровоткрытийая наб., д. 4/5 пография, пр. Сапунова,аз 1519/15 Изд.591 НПО Государственного комитет по делам изобретен 113035, Москва, Ж, Р
СмотретьЗаявка
2458737, 03.03.1977
ПРЕДПРИЯТИЕ ПЯ А-7956
КРУТОВ АЛЕКСЕЙ ИВАНОВИЧ, МИРОНОВ ГЕННАДИЙ ГРИГОРЬЕВИЧ, НИКОЛЕНКО БОРИС ИВАНОВИЧ, ОСИПОВ АНАТОЛИЙ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 19/32
Метки: адаптивного, объекта, положением, программного
Опубликовано: 30.08.1978
Код ссылки
<a href="https://patents.su/3-622054-ustrojjstvo-dlya-adaptivnogo-programmnogo-upravleniya-polozheniem-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для адаптивного программного управления положением объекта</a>
Датчик кода морзе

Номер патента: 508951
Опубликовано: 30.03.1976
Авторы: Баландин, Катин, Семенов
МПК: H04L 3/04
...10,. Одновременно триггер 11, возвращается в исходное состояние, и выводится из исходного состояния триггер 11 ь которыи тем самым обеспечивает совпадение сигналов на следующей схеме 12, совпадения с аналогичным продвижением информации в следующую запоминающую линейку. Такое продвижение информации осуществляется вплоть до записи в последнюю запоминающую линейку 10 с соответствующей работой каждого элементарного блока 8 управления. Элементы 13 1313 задержки необходимы для того, чтобы запись информации в запоминающие линейки буферното накопителя 4 произошла раньше, чем поступит на них сигнал считывания от элементарных блоков блока 8 управления. Считывание с последней запоминающей линейки 10 производится по сигналу от триггера 23 блока 7...
Синхронный датчик кода морзе

Номер патента: 907841
Опубликовано: 23.02.1982
Авторы: Кудрявицкий, Таранченко
МПК: H04L 15/03
Метки: датчик, кода, морзе, синхронный
...14 и 15 оптронов 7 и 8 и в зависимости от полярности указанных посылок возбуждается 25 один иэ светодиодов 14 или 15, Вследствие этого попеременно открываются Фотоприемники 1 б и. 17 оптронов 7 и 8. На выходе блока 6 при смене полярности госылок возникают импульсы, из Зв которых в формирователе 9 формируются сигналы синхронизации задающего генератора 1. Блок 10 устанавливает частоту задающего генератора 1 в соответствие со скоростью передаци инфор- З 5 мации синхронной телеграфной аппаратуры 13Регулируемый делитель 11 уменьшает в целое число раз частоту следования импульсов задающего генератора 1 и обеспечивает тем самым необходимую длительность и частоту следования "точек". Изменением коэффициента деления регулируемого...
Преобразователь код-шим-сигнал

Номер патента: 1667255
Опубликовано: 30.07.1991
Автор: Лозинский
МПК: H03M 1/82
Метки: код-шим-сигнал
...задержанный относительно заднего фронта импульса Ол на время Т/2, т е, импульс запуска ШИМ-сигнала Своим передним фронтом указанный импульс зэпу хает триггеры 5 и б (фиг, 1) Таким образос помощью импульсов О и От фопмируют задержанный и скорректировэнньи ШИМ-сигнал, обладающий высокой эбппьностью длительности Дпя приве денньх выше конкретных условий он имеет форму сигнала О 0 (фиг 4) Тэл же для сравнения под индексом О показаны форма и попоххени ШИУ-сигнала, который бып бы без его обработки.Широтно модулированные импульсы канапэ младших разрядов с выхода первого три. ерэ 5 поступают на формирователь 7, а аналогичные импульсы канала старших разрядов с выхода втрого триггера б - на форлирователь 8, После формирователей 7 и 8 эти импульсы...
Датчик кодов для устройства контроля запоминающих блоков

Номер патента: 521608
Опубликовано: 15.07.1976
Авторы: Виталиев, Гвинепадзе, Логинова, Смирнов
МПК: G11C 29/00
Метки: блоков, датчик, запоминающих, кодов, устройства
...После этого ближайший синхроимпульс, пришедший по шине 6, осуществляет параллельную перепись информации с регистра 2 на регистр 3, а далее счетчик адреса, т. е, регистр 16, сбрасывается в состояние 000 и процесс матричного преобразования повторяется над новым вектором 7 7 7, и т д.010 О 0 Са 0 О ООи г мъ ят) последовательность, генерируемая датчикомт представляет собой линейную возвратную т последовательность. В случае произвольной матрицы А последовательность на выходе датчика представляет собой суперпозицию и Э линейных возвратных последовательностей, подчиняющихся одному и тому же линейному преобразованию, показанному в выражении (3), но сдвинутых одно относительно другого на величину, которая определяется кон-кретным...
Устройство для поиска экстремума функционала входных сигналов инерционного объекта

Номер патента: 978100
Опубликовано: 30.11.1982
Авторы: Любашевский, Орлов, Тартаковский, Фришберг, Харченков, Шубин
МПК: G05B 13/02
Метки: входных, инерционного, объекта, поиска, сигналов, функционала, экстремума
...к к к кК где 0= 0(х 1,х ,х икк( к- кК- )ьКак видно, это приращение, если не учитывать различные помехи, является следствием изменения входного сигнала х на величину Лх". При замыкании ключа 5 найденное приращение Функционала дя "поступает на входы коммутатора б каналов и блока 7 логического управления, Сигнал Ь О " с выхода коммутатора б каналов поступает на второй вход блока 8 умножения формирователя 10 приращения перного канала. На перный вход блока 8 умножения поступает сигнал знака постоянного приращения с выхода блока 7 логическогоуправленияя, Таким образом, на выходе усилителя 11, подключенного своим входом к выходу блока 8 умножения 4формируется переменное приращение Вф" для следующего к+1 циклаВ" .= -Вд " з 19 п(аК) (3) где В 7...
Предыдущий патент: Цифровое устройство управления следящим дискретным электроприводом
Следующий патент: Устройство для адаптивного управления металлорежущим станком
Случайный патент: Устройство для контроля перерывов электроснабжения