Устройство для решения задач нелинейного программирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 480090
Автор: Бойчук
Текст
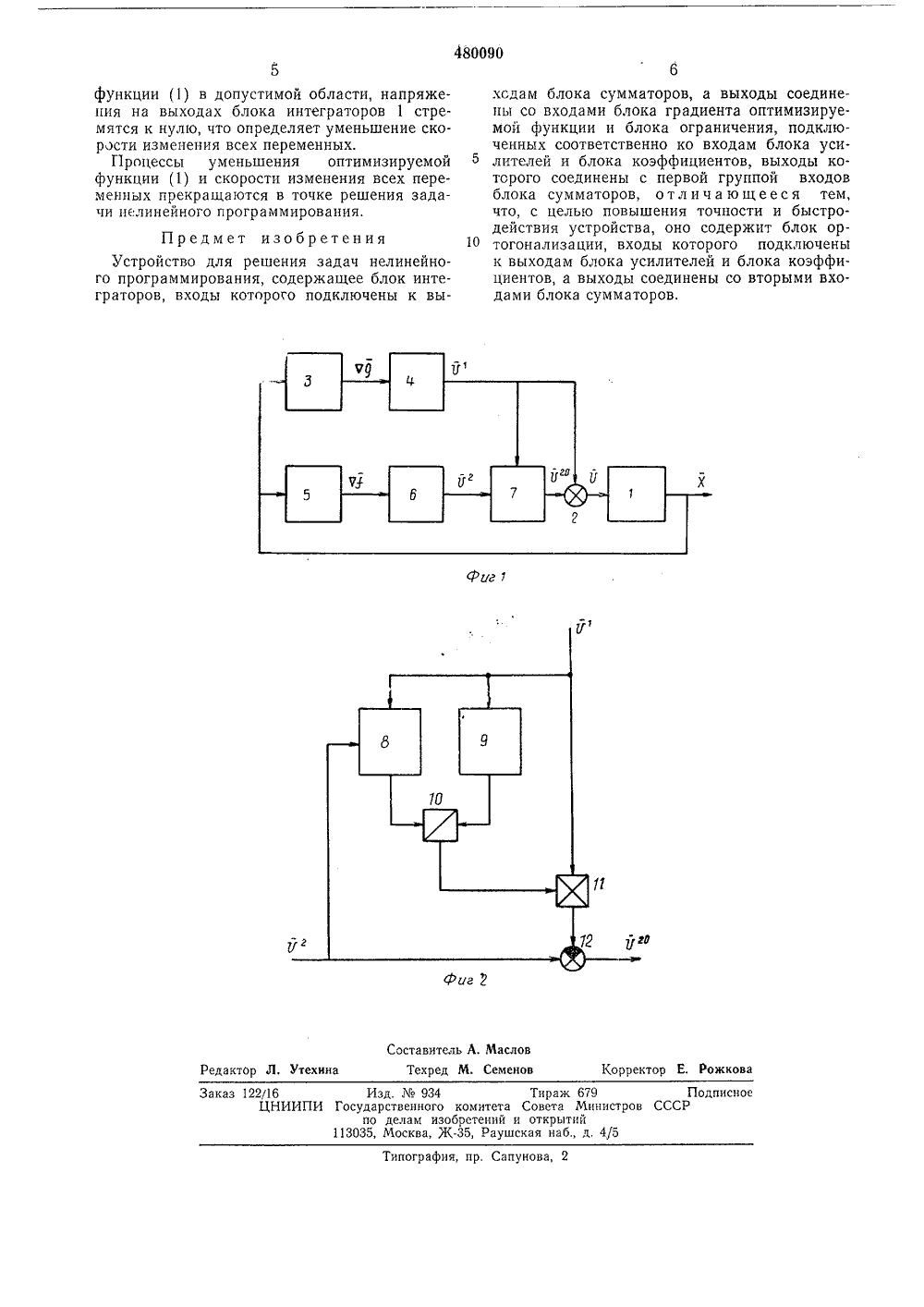
(11) 480090 ОПИСА ИЕ ИЗОБРЕТЕНИЯ Союз Советских Социалистических Ресабанк(61) Дополнительное вт, вид г 1) Ч 1) 1994726/18 влено 08.02.7 присоединением заявкиГосударственныи камите авета Министров ССС 23) Приоритетпубликовано 05.08.75. Бюллетень(53) Ъ 81.333:5088.8) делам изобретений к открытий Дата опубликования писания 11,03.7(72) Автор изобретения Л, М, Бойчук Ордена Ленина институт кибернетики АН Украинской СС(71) Заявите 54) УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ЗАД НЕЛИНЕЙНОГО ПРОГРАММИРОВАН И ержит блокременных; блий 3 для форот функцийок коэффици Изобретение относится к области аналоговой вычислительной техники.Известны устройства для решения задачнелинейного программирования, содержащиеблок интеграторов, вход которого подключенк выходу блока сумматоров, а выход соединен со входами блока градиента оптимизируемой функции и блока ограничений, подключенных соответственно ко входам блока усилителей и блока коэффициентов, выход которого соединен с первым входом блока сумматоров.Известные устройства имеют недостаточновысокие точность и быстродействие,Предложенное устройство отличается от известных тем, что оно содержит блок ортогонализации, входы которого подключены к выходам блока усилителей и блока коэффициентов, а выход соединен со вторым входомблока сумматоров.Это повышает точность и быстродействиеустройства.На фиг, 1 приведена блок-схема устройства;на фиг. 2 - блок-схема блока ортогонализации,Устройство сод интеграторов 1для изменения пе ок сумматоров2, блок ограничен мирования сигнала, зависящего ограничений иих градиентов; бл ентов 4 для задания скорости движения и допустимой обла. сти; блок градиента 5 оптимизируемой функции; блок усилителей 6 для задания направления и скорости движения к экстремуму и блок ортогонализации 7.Блок ортогонализации 7 может, например, содержать блок 8 скалярного произведения вектора управления на выходе канала ограничений на вектор управления на выходе канала оптимизации, блок 9 для получения квадрата модуля вектора управления на выходе канала ограничений, блок 10 для деления выходных напряжений блоков 8 и 9, блок 11 множительных устройств для умножения вектора управления на выходе канала ограничений на выходное напряжение блока 10, блок 12 для вычитания напряжений на выходах блока усилителей 6 и на выходах бло 11 В качестве элементов устройства можно использовать, например, операционные усилители, множительные и делительные блоки и функциональные преобразователи, выполнен ные, например, на диодах и резисторах. Блокскалярных произведений и блок квадрата модуля вектора можно, в частности, реализовать на указанных множительных блоках. В качестве элементов блока интеграторов можно ис пользовать аналоговые интеграторы, выпол(9,а) ненные, например, на операционных усилителях.Устройство предназначено для нахождения значений переменных, при которых функция- Р (х), (1)где х - п-мерный вектор,достигает экстремума в допустимой области изменения переменных, определяемой системой ограничений в форме равенств и(или) неравенств д - д,.(х).: 0; / = - 1, т. (2)Требуемое изменение во времени переменных производится с помощью интеграторов блока 1, описываемых дифференциальными уравнениями х= - и, (2,а)где Г/ - вектор управляющих воздействий интеграторов.Закон управления интеграторами такови+ изо (3)где Р - вектор управления, определяющий движение к допустимой области (2);У" - ортогонализованный вектор оптимизации, определяющий движение к экстремуму функции (1).Основное требование к векторам сСс и Уо заключается в том, чтобы они всегда были ортогональны, т. е. их скалярное произведение должно быть равно нулю(ии, и )=О, (4)Вектор управления Г формируется так же, как и в схеме прототипа, т. е. по методу штрафных функций:и =- ф, (5)где а(0 - коэффициент, определяющий скорость движения к допустимой области и реализуемый в блоке 4, а 7 д - градиент некоторой положительно определенной функции ограниченийд - ,о(о, д ), (5,а)Градиент 7,о получают в блоке 3, Вид функции (5, а) выбирают таким, что при выполнении условий (2), т. е, в допустимой области, выполняются также соотношенияд:.О, д=0, (5,б) Вектор оптимизации Р равени = ",дД, (6)где 71 - градиент функции (1), получаемый в блоке 5;уо - коэффициент, определяющий направление и скорость движения к экстремуму функции (1) и реализуемый в блоке 6.Ортогонализованный вектор оптимизации (б) можно вычислить, например, по формулеифф =ссф (и, (7)(и, и) 40 45 50 55 60 65 которая определяет структуру блока 7 (фиг. 2). В этой формуле И, У - скалярное произведение векторов (5) и (6), реализуемое в блоке 8; ) Р, Ь - квадрат модуля вектора (5), реализуемый в блоке 9,Требуемая для реализации выражения (7) операция деления производится в блоке 10, операция умножения - в блоке 11, операция вычитания векторов - с помощью блока 12.При законе управления (3) скорость изменения функции ограничений (5,а) с учетом выражений (2, а, 5) равна+(и изб)а Так как а(0 и в силу свойства ортогональности (4), это выражение примет видЫ = а (Чя Ла)0 что определяет устойчивое монотонное движение к допустимой области (2), независимое ос изменения оптимизируемой функции (1).Скорость изменения оптимизируемой функции при законе управления (3) равна Г = (Ь 7, х) = (д, и) = (ф, сси) + (ф и"), (9)В силу свойства (5, б) вектор Р при приближении к допустимой области (2) стремится к нулю. При этом знак скорости изменения оптимизируемой функции стремится к требуемому коэффициенту оси уо. В самой допустимой области, учитывая выражения (6, 7), получаем: т. е. при достижении допустимой области, которое в силу условия (8) обязательно наступает, движение происходит по градиенту оптимизируемой функции.Устройство работает следующим образом.Пусть, например, необходимо найти минимум функции (1). Начальные значения на. пряжения на выходах блока интеграторов таковы, что заданные ограничения (2) не соблкдаются. В этот же момент времени на выходах блока коэффициентов 4 появляются такие напряжения, что функция ограничения (5,а) начинает стремиться к нулю, т. е. происходит движение системы к допустимой области. Процесс изменения во времени функции (5, а) при этом не зависит от изменения напряжения на выходах блока усилителей б. При приближении к допустимой области напряжения на выходах блока 4 приближаются к нулю. При этом напряжения на выходах блока сумматоров 2 становятся такими, что оптимизируемая функция (1) начинает уменьшаться. После этого напряжения на выходах блока градиентов 5 и соответственно на выходах блока усилителей 6 и блока ортогонализации 7 также уменьшается. Таким образом, при достижении минимума оптимизируемой48 ОООО фиг 1 Составитель А. Масло Техред М. Семено Корректор Е. Рожкова Редактор Л. Утехина Тираж 679 комитета Совета Министров СС бретений и открытийдпис Изд.934 И Государственного по делам из 113035, Москва, Жпография, пр. Сапунова, 2 5функции (1) в допустимой области, напряжения на выходах блока интеграторов 1 стремятся к нулю, что определяет уменьшение скорости изменения всех переменных.Процессы уменьшения оптимизируемой функции (1) и скорости изменения всех переменных прекращаются в точке решения задачи нелинейного программирования,Предмет изобретенияУстройство для решения задач нелинейного программирования, содержащее блок интеграторов, входы которого подключены к выхсдам блока сумматоров, а выходы соединены со входами блока градиента оптимизируемой функции и блока ограничения, подключенных соответственно ко входам блока усилителей и блока коэффициентов, выходы которого соединены с первой группой входов блока сумматоров, о т л и ч а ю щ е е с я тем, что, с целью повышения точности и быстродействия устройства, оно содержит блок ор тогонализации, входы которого подключенык выходам блока усилителей и блока коэффи.циентов, а выходы соединены со вторыми входами блока сумматоров.
СмотретьЗаявка
1994726, 08.02.1974
ОРДЕНА ЛЕНИНА ИНСТИТУТ КИБЕРНЕТИКИ АН УКРАИНСКОЙ ССР
БОЙЧУК ЛЕОНИД МИХАЙЛОВИЧ
МПК / Метки
МПК: G06G 7/38
Метки: задач, нелинейного, программирования, решения
Опубликовано: 05.08.1975
Код ссылки
<a href="https://patents.su/3-480090-ustrojjstvo-dlya-resheniya-zadach-nelinejjnogo-programmirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для решения задач нелинейного программирования</a>
Способ управления многомостовой выпрямительно-инверторной подстанцией и устройство для его осуществления

Номер патента: 639377
Опубликовано: 25.12.1978
Авторы: Андронов, Боярский, Емельянов, Набутовский
МПК: H02P 13/16
Метки: выпрямительно-инверторной, многомостовой, подстанцией
...уставок.На фиг, 3 изображена временная диаграмма работы выявительно-логического З 5блока, где.а - линейные токи аварийного пре образователя;б - линейные токи неаварийного преОбразователя;ЮОв - выходной сигнал релейного элемента 42;г - выходной сигнал логического элемента ИЛИ 45;д - выходной сигнал логического элемента ЗАПРЕТ 46,"е - выходной сигнал элемента 47 выдержки времени;ж,з - выходные сигналы блока 38 распределения уставок;50и - выходной сигнал коррекции уста" вок аварийного блока;к - то же, неаварийного блока;л - сигналы уставок РТ аварийного и неаварийного блоков.55Изменение переменных соответствуют вышеприведенному описанию, из которого следует, что выявительно-логический. блок формирует на своем выходе...
Блок вычисления логических функций
Номер патента: 1800465
Опубликовано: 07.03.1993
Авторы: Зарембовская, Мельников, Новиков, Фадеева
МПК: G06F 15/419
Метки: блок, вычисления, логических, функций
...путь, выходящий направо из графа или вниз.Можно любому графу сопоставить некоторую булевую функцию так, чтобы вершины графа были взвешены аргументами функции, а значение функции при зададанных аргументах определялось движением по графу из начальной вершины к тому или иному выходу графа и принимало значение единицы при выходе из графа направо (й), а значение нуля - при выходе вниз (О).Примеры графов микропрограмм для некоторых логических элементов, изображенных на фиг, 4, представлены на фиг.5. менной; В - признак инверсии весовой переменной; й, О - адреса перехода соответственно право и вниз.При В = 1 переменная Ъ инвертируется. Если значение Е с учетом значения В равно 1, то выбирается адрес Я и по нему производится обращение к...
Нелинейные функциональные блоки, например блок перемножения или функциональный нелинейный преобразователь

Номер патента: 115979
Опубликовано: 01.01.1958
Автор: Петров
МПК: G06G 7/164
Метки: блок, блоки, например, нелинейные, нелинейный, перемножения, функциональные, функциональный
...зависимостью у = (х), апроксимирующей заданную функцию кусочно-линейным образом.Настройка схемы нелинейного преобразователя производиъся аналогично настройке такой же схемы с вакуумными диодами и обеспечивается последовательным (одна за другой) открыванием элементарных нелинейных ячеек.Схема элементарной нелинейной ячейки (фиг. 2) основана на перераспределении токови протекающих по двум диодным цепочкам, состоящим из диодов Р и Р. Точка д имеет потенциал земли и диоды Р и Р включены на одно и то же напряжение, причем, если диод Р, включен в прямом направлении (при положительном значении тока ), диод Р включается в обратном направлении. При изменении знака токадиод Р включается в обратном направлении, а диод Р в прямом...
Устройство защиты блока питания тиристорных логических элементов от изменения чередования и обрыва фаз питающей сети

Номер патента: 687522
Опубликовано: 25.09.1979
Авторы: Игнатенко, Либерман, Парфенов, Платонов, Примаков, Чернихов
МПК: H02H 7/09
Метки: блока, защиты, изменения, логических, обрыва, питания, питающей, сети, тиристорных, фаз, чередования, элементов
...и третий резисторы - со своими катодами, пятый,шестой диоды, четвертый, пятый и шестой резисторы, введены седьмой, восьмой и девятый диоды, причем катод первого стабилитрона соединен с катодомпятого диода, анод которого соединенс анЬдом седьмого диода непосредственно, а через четвертый резистор -с третьей Фазой источника напряжения,по цепи: резистор 21 - диод 12 - резистор 22, На аноде диода 10 появляется напряжение, обусловленное падением напряжения на резисторе 22 и диоде 12. Так как сопротивление рения резистора 22, то зто напряжениена входе повторителя на тиристоре 4недостаточно для его включения,Припоявлении положительной полуволнынапряжения фазы 1 ток протекает поцепи: диод 13 " резистор 22 и подпирает диод 12. На аноде диода 10...
Устройство для вычисления тригонометрических функций

Номер патента: 924700
Опубликовано: 30.04.1982
МПК: G06F 7/548
Метки: вычисления, тригонометрических, функций
...7 частоты, элемент И 8, элемент 9 задержки, сумматор 10, элемент И 11, элемент 12 задержки, сумматор 13 делитель 14 частоты, элемент И 15, элемент 1 б задержки, делитель 17 частоты и счетчик 18.(6) 5 92470Начальное состояние сумматора 3- единицы во всех разрядах, а сумматоров б, 1 О, 13 и счетчика 1 а - нулевое. Делитель 2 частоты осуществляет деление количества вход ных импульсов на коэффициент 8400/1121, Делитель 7 частоты делит число входных импульсов нв коэффициент 40/33. Делители 14 и 17 чае" тоты делят число входных импульсов в соответственно на коэффициенты 5/2 и 35/2Устройство работае. следунщим ббразом.С входа 1 последовательность импульсов поступает через элементы , 12, 9 и 16 задержки на вход делите" ля 17 частоты, с...
Предыдущий патент: Устройство для воспроизведения функций двух переменных
Следующий патент: Устройство для моделирования многодвигательного электропривода
Случайный патент: Способ карротажа