Способ определения пространственного положения буровых скважин
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
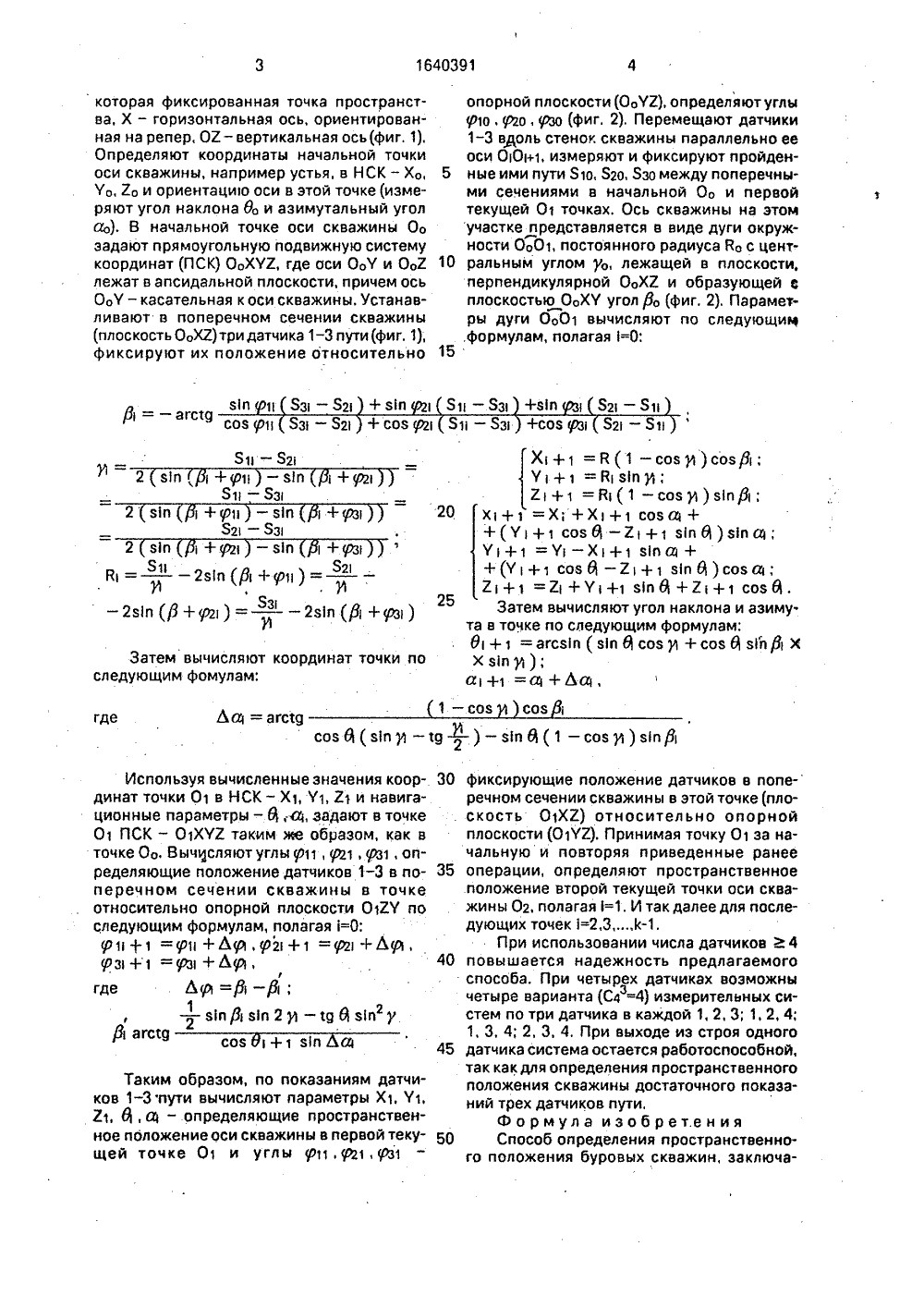
(55 Е ИЗОБР рив поя ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР К АВТОРСКОМУ СВИДЕТЕЛЬСТВ(56) Авторское свидетельство СССР М 4488280, кл, Е 21 В 47/022, 1973,Авторское свидетельство СССР М 1213181, кл. Е 21 В 47/022, 1984.(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ БУРОВЫХ СКВАЖИН(57) Изобретение относится к буровой технике и позволяет удешевить работы за счет использования однотипного оборудования Изобретение относится к буровой технике, в частности к определению пространственного положения обсаженных буровых скважин.Цель изобретения - расширение области применения за счет обеспечения исследования горизонтальных скважин и упрощение способа за счет использования однотипного оборудования для измерения параметров внутри скважины,На фиг, 1 изображена скважина, искленная в пространстве; нафиг,2-схема, сняющая расчет параметров.Способ определения пространственного положения буровых скважин основан на заданий опорной плоскости и определении пространственного положения оси скважины в начальной точке, например в ее устье, причем за опорную принимают апсидальдля измерения параметров внутри скважины. Для этого задают опорную аксидальную плоскость и определяют пространственное положение оси скважины в начальной точке, в которой устанавливают по меньшей мере три датчика пути. Фиксируют положение датчиков относительно опорной плоскости. Затем перемещают датчики по скважине вдоль ее стенок параллельно оси и измеряют пройденные ими пути между поперечными сечениями скважины в начальной и текущей точках. По соотношениям измеренных путей определяют пространственное положение оси скважины в текущей точке. Для определения положения каждой последующей точки за начальную принимают Я предыдущую точку. 2 ил. ную плоскость, и осуществляется следующим образом. В поперечном сечении скважины в начальной точке устанавливают по меньшей мере три датчика пути, фиксируют их положение относительно опорной плоскости, перемещают датчики по скважине вдоль ее стенок параллельно оси, измеряют и фиксируют пройденные ими пути между поперечными сечениями скважины в начальной и текущей точках и по их соотношениям судят о пространственном положенииоси скважины в текущей точке, причем для определения положения каждой последующей точки за начальную принимают предыдущую точку,При использовании трех датчиков пути способ реализуется следующим образом.Задают прямоугольную неподвижную систему координат(НСК) ОХУ 7, где О - не+ р 1 - з 1 и+ого Я 2 - Яз 1 - соз соз Ьа = агстд где соз Й (з 1 иу - 1 д ) - з 1 и Й (1 - соз )4) в 1 и% которая фиксированная точка пространства, Х - горизонтальная ось, ориентированная на репер, 02- вертикальная ось(фиг. 1), Определяют координаты начальной точки оси скважины, например устья, в НСК - Хо, Уо, 2 о и ориентацию оси в этой точке (измеряют угол наклона Во и азимутальный угол ао). В начальной точке оси скважины Оо задают прямоугольную подвижную систему координат (ПСК) ОСХУ 2, где оси ОУ и Оо 2 лежат в апсидальной плоскости, причем ось ОоУ - касательная к оси скважины, Устанавливают в поперечном сечении скважины (плоскость ООХ 2) три датчика 1 - 3 пути (фиг. 1); фиксируют их положение относительно 2 з 1 и+ рг - з 1 и+ йВ = -- 2 зи (Р +Р 1 ) =Я 1 Я 2у- 2 зи (Р+уг ) = -- 2 з 1 и (Р +р )Язу Затем вычисляют координат точки последующим фомулам; Используя вычисленные значения координат точки 01 в НСК - Х 1, У 1, 21 и навигационные параметры - Й,а 1, задают в точкеО 1 ПСК - 01 ХУ 2 таким же образом, как вточке Оо. Вычисляют углы р 11, а 1, уз 1, определяющие положение датчиков 1-3 в поперечном сечении скважины в точкеотносительно опорной плоскости 012 У последующим формулам, полагая 1=0:гО 1 + 1 = ф 1 + Л ф, ф 2 + 1 = 02 + Лф,Оз +1 - Щ 3 + ЬЯ,где Лр =Р - ф 1;12 з 1 п ф з 1 и 2 у - тд Й з 1 и у2соз +1 з 1 и ад агстд Таким образом, по показаниям датчиков 1-3 пути вычисляют параметры Х 1. У 1, 21, Й, а в .определяющие пространственное положение оси скважины в первой текущей точке 01 и углы у 11,1621,огз 1 опорной плоскости (ОоУ 2), определяют углы 01 о, ого, ао (фиг. 2), Перемещают датчики 1-3 вдоль стенок скважины параллельно ее оси ОО+1, измеряют и фиксируют пройден ные ими пути Я 1 о, Я 2 о, Язо между поперечными сечениями в начальной Оо и первой текущей 01 точках. Ось скважины на этом участке представляется в виде дуги окружности Оо 01, постоянного радиуса Яо с цент ральным углом уо, лежащей в плоскости,перпендикулярной ОоХ 2 и образующей е плоскостью ООХУ угол Ро (фиг. 2), Параметры дуги Оо 01 вычисляют по следующим.формулам, полагая 1=0:15 Х+1 = В (1 - сов у ) созф; У+= В з 1 и 11; 2+1 =В(1 - сову) з 1 и%; 20 х 1 +1 = Х; + Х+1 соз а + + ( У+1 соз Й 2 +1 з 1 и Й ) з 1 и а 1; У+1 =У - Х+1 ви а + +(У+1 соз Й - 2+1 в 1 и Й) сова, 2+1 =2 + У +1 з 1 и Й +2+1 соз Й.Затем вычисляют угол наклона и азимута в точке по следующим формулам; д+1 =агсз 1 и (в 1 и Й сову +сов Й зир х Х з 1 и у ); а+1 =а+Ьа,30 фиксирующие положение датчиков в поперечном сечении скважины в этой точке (плоскость 01 Х 2) относительно опорнойплоскости (01 У 2). Принимая точку 01 за начальную и повторяя приведенные ранее35 операции, определяют пространственное.положение второй текущей точки оси скважины Ог, полагая 1=1, И так далее для последующих точек 1=2,3К,При использовании числа датчиков440 повышается надежность предлагаемогоспособа. При четырех датчиках возможнычетыре варианта (С 4 =4) измерительных систем по три датчика в каждой 1, 2, 3; 1, 2, 4;1, 3, 4; 2, 3, 4, При выходе из строя одного45 датчика система остается работоспособной,так как для определения пространственногоположения скважины достаточного показаний трех датчиков пути,Формула изобретения50 Способ определения пространственного положения буровых скважин, эаключа1640391 йсг. 2Корректор И.Муска Составитель Ю.ЛупичевТехред М.Моргентал тор М.Бла Заказ 1006 Тираж 374 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ ССС 113035. Москва, Ж. Раушская наб 4/5 роиэводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина ющийся в том, что задают опорную апсидальную плоскость и определяют пространственное положение оси скважины в начальной точке, о т л и ч а ю щ и й с я тем, что, с целью удешевления работ эа счет при менения однотипного оборудования, в начальной точке устанавливают по меньшей мере три датчика пути, фиксируют их положение относительно опорной плоскости, перемещают датчики по скважине вдоль ее стенок параллельно оси, измеряют пройденные ими пути между поперечными сечениями скважины в начальной и текущей точках и по их соотношениям определяют пространственное положение оси скважины в текущей точке, причем для определения положения каждой последующей точки за начальную принимают предыдущую точку.,
СмотретьЗаявка
4633867, 09.01.1989
ФРУНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ТЮНЯЕВ ГЕРМАН АЛЕКСЕЕВИЧ, ИНДЕЙКИН ЕВГЕНИЙ ВЯЧЕСЛАВОВИЧ
МПК / Метки
МПК: E21B 47/022
Метки: буровых, положения, пространственного, скважин
Опубликовано: 07.04.1991
Код ссылки
<a href="https://patents.su/3-1640391-sposob-opredeleniya-prostranstvennogo-polozheniya-burovykh-skvazhin.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения пространственного положения буровых скважин</a>
Устройство для измерения положения железнодорожного пути в вертикальной поперечной плоскости

Номер патента: 1752841
Опубликовано: 07.08.1992
Автор: Кацман
МПК: E01B 35/04
Метки: вертикальной, железнодорожного, плоскости, положения, поперечной, пути
...поворота которого параллельна параллельна оси устройства, Токопод-. продольной оси устройства, регистра- З 0 воды к светодиоду 6 и фотодиоду 7 вы- . тор, включающий в себя сканатор, ки- полнены безмоменгными, чтобы не нанематическисоединенный с осью мерно- гружать маятник 8, Демпфер маятника ,го колеса, и систему отсчета, вклю-, .и устройство юстировки места нуля чающую в себя светодиод и фотодиод, маятника 8 на чертеже не приведены. соединенный с регистратором, ", . Импульс с фотодиода 7 поступает наНедостатком известного устройства усилитель 9 мощности и далее на35является сложность, заключающаяся в электромагнит 10. Нож 11 якоря электналичии двух сканаторов воэвратно- ромагнита. установлен над барабаномпостуйательного движения и...
Устройство управления рабочим органом для выправки положения пути

Номер патента: 966130
Опубликовано: 15.10.1982
Авторы: Данилкин, Ершова, Иванов, Перепелкин, Шарапов, Юдин
МПК: E01B 33/18
Метки: выправки, органом, положения, пути, рабочим
...с датчикомприращенийположения пути, который через блок 9задания программной величины связан с одним иэ входов блока 10 сравнения, другой вход которого связан с выходом датчика 5 положения пути, а выход блока 10 сравнения соединен с рабочим органом 11 для выправки пути.Для обеспечения работы устройства, например, на переходной кривой, необходимо до начала переходной кривой 130 Фпри помощи блока 9 задания программной величины установить величинутребуемого приращения стрелы изгибаопределяемую радиусом круговой кривойи длиной ее переходной, а в началепереходной кривой посредством блока7 управления включить связь междудатчиком 6 пройденного пути и датчиком 8 приращений, а также знак прира щенийв зависимости от того "левая"или...
Машина на рельсовом ходу для измерения, регистрации и корректировки положения пути

Номер патента: 1505447
Опубликовано: 30.08.1989
Автор: Йозеф
МПК: E01B 35/04
Метки: корректировки, положения, пути, регистрации, рельсовом, ходу
...рас. стояния бокового положения или отклонения по высоте пути по отношению к фиксированным точкам 58, расположен 5447 50 в управляющее устройствр заданного 55 (согласно схеме путей) параметра не 5 1 О 15 20 25 30 35 40 45 ным,например, нэ мачтах 59 контактной сети, лазерные излучатель и приемник 60 с совпадающей оптическойосью 61, проходящей в плоскости, пер.пендикулярной оси пути, Лазерный излучатель 48 оборудовай специальнойоптикой, с помощью которой лазерномулучу как в горизонтальной, так и ввертикальной плоскостях придаетсявеерообразная форма. Горизонтальнаясветовая плоскость используется длянивелирования, а вертикальная - длярихтовки пути, Обе световые плоскости-лазерного луча схематично пред-.ставлены на фиг,1 в виде...
Способ постановки выправляемого железнодорожного пути в требуемое положение

Номер патента: 253093
Опубликовано: 01.01.1969
Авторы: Гора, Малицкий, Проектно, Сооружений, Сухачев
МПК: E01B 33/04
Метки: выправляемого, железнодорожного, положение, постановки, пути, требуемое
...фактического положения выправлен. ного пути,1 ПРАВЛЯЕМОГОРЕБУЕМОЕ ПОЛОЖЕНИЕ1. - расстояние выправляемой точки рельсовой нитки от начала работ;Е 1 - участок выправки;- длина отвода возвышения;О - начало работ в данное окно;А - ,начало работ в следующее окно;В - конечная точка работ в данное окно;Й - фактическая разность во взаимномрасположениями конечных точек сосед,ней и выправляемой рельсовых ниток.Программу выправки в плане также можно выразить графиком (см. фиг. 3 и 4) где 4 - проектное положение выправляемогопути;5 - фактическое положение соседнего пути;6 - проектное положение соседнего пути;5 р - проектное расстояние между рельсовой ниткой выправленного пути ипроектным положением рельсовойнитки соседнего пути;Ь 5 - отклонение точек...
Устройство для контроля положения железнодорожного пути в продольном профилеи плане

Номер патента: 416433
Опубликовано: 25.02.1974
Авторы: Гридин, Иванов, Корыстин, Оптики, Тимофеев, Цуккерман
МПК: E01B 35/06
Метки: железнодорожного, плане, положения, продольном, профилеи, пути
...излучения, проходит .ерез блок модулятора, оторый образует в луче равпосигнальную зону, и попадает на фотоприем ник рассогласования. Гели положение равносигнальной зоны совпадает с центром фотоприемника 3, то с последнего переменный электрический сигнал не снимается, Если равносигнальная зона смещается вследствие смещения блока модулятора, то переменный электрический сигнал, снимаемый с фотоприемника 3, поступает в усилительно-преобразовательный блок 4, на выходе которого вырабатываются два напряжения, пропорциональные величинам погрешностей железнодорожного пути в продольном профиле и плане.При расположении центра вращения полу- диска на линии, соединяющей центры источника светового излучения и фотоприемника рассогласования (см. фиг....
Предыдущий патент: Датчик угла наклона буровой скважины
Следующий патент: Скважинный гидролокатор
Случайный патент: Роликовая передача