Следящая система двустороннего действия
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1296404
Авторы: Барац, Белоцерковский, Жуков

Текст
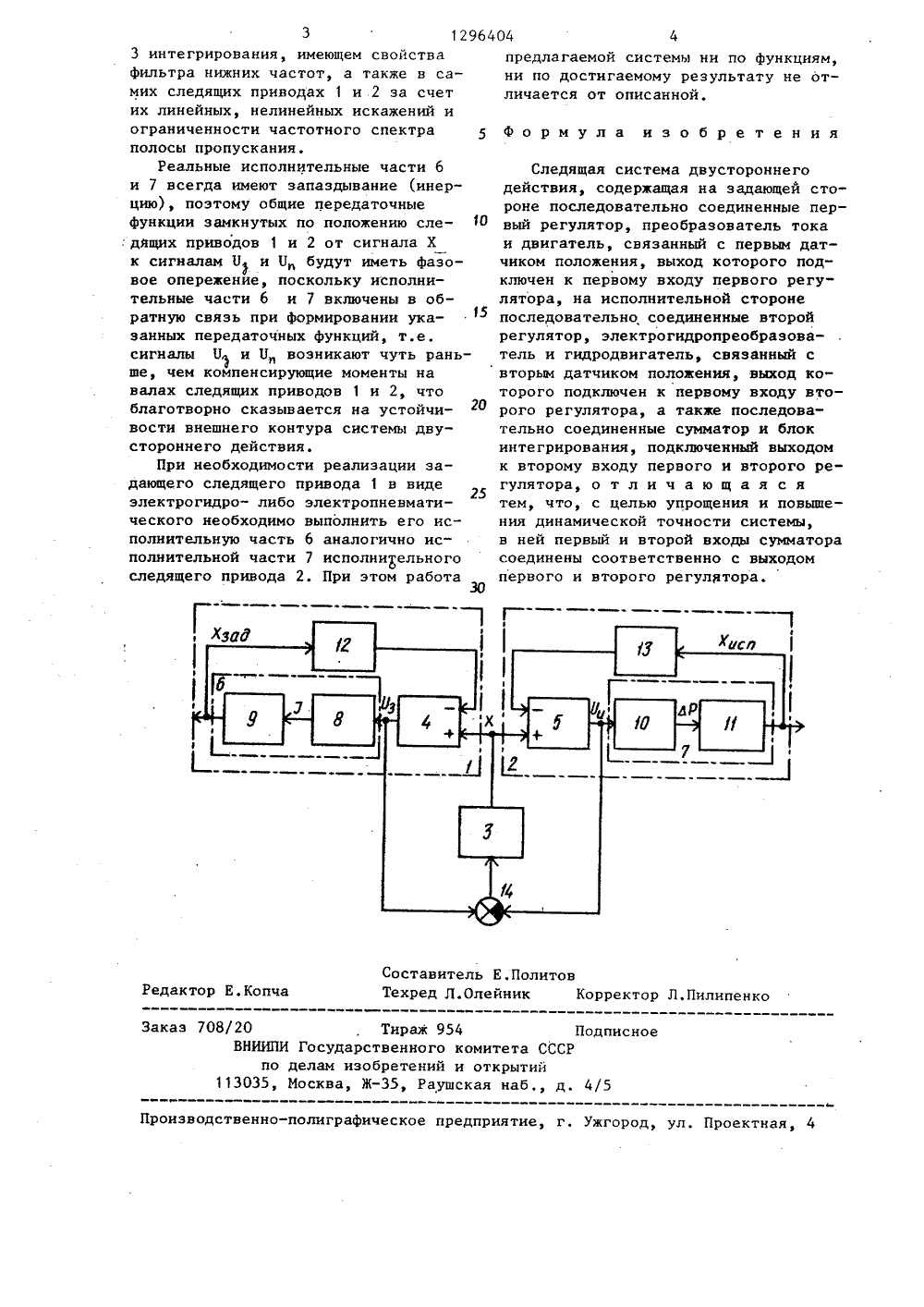
(57) Изобретробототехникзовано при с пуляторов. Ц упрощение ус динамической чения датчик ие содержит суммния, два ртока, двигзователь,положен ОСУДАРСТ 8 ЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ВТОРСИОМУ СВИДЕТЕЛЬСТВ(71) Донецкое отделение Института(56) Электрогидравлические следящсистемы./ Под ред, В,А.Хохлова. ММашиностроение, 1971, с. 145Проектирование следящих системдвустороннего действия/ Под ред.В.С.Кулешова. М.: Машиностроение,1980, с71. ЩАЯ СИСТЕМА ДВУСТОРОННЕГОение относится к областии может быть испольоздании копирующих мани- елью изобретения является тройства и повышение еготочности за счет исклюов нагрузки. Устройствоатор, блок интегрироваулятора, преобразователь ель, электрогидропреобраидродвигатель и два датчиИзобретение относится к робототехнике и может быть использованопри создании копирующих манипуляторов.Цель изобретения - упрощение и повышение динамической точности устройства эа счет исключения датчиков давления.На чертеже изображена функциональная схема следящей системы двусто роннего действия,Система содержит задающий 1 и исполнительный 2 следящие приводы, блок 3 интегрирования, первый 4 и второй 5 регуляторы, исполнительные части 6 и 7, преобразователь 8 тока, двигатель 9, электрогидропреобразователь 10, гидродвигатель 11, первый 12 и второй 13 датчики положения, сумматор 14.Следящая система двухстороннего действия работает следующим образом.При отсутствии нагрузки привод 1 находится в согласованном положении, сигналы Б на выходе регулятора 4 и 1 на выходе преобразователМ 8 тока нулевые, величина выходной координаты хц равна уставке х, ошибка равна нулю.При возникновении момента внешней нагрузки на выходном валу привода 1 в первый момент времени эа счет люфтов и упругости кинематической передачи выходная координата хнезначительно "проседает" в сторойу действия момента внешней нагрузки. При этом возникает ненулевое рассогласование на входе регулятора 4 (напри мер ПИД-регулятора), который вырабатывает сигнал Б, воздействующий на преоброзователь 8 тока. Последний создает в двигателе 9 (например двигателе постоянного тока) ток 1, определяющий момент противодействия на валу двигателя 9 моменту внешней нагрузки, Ток 1 растет до тех пор, пока моменты: приложенный к валу задающего органа оператором (момент нагрузки задающего следящего привода 1) и противодействующий ему со стоРоны двигателя 9, не уравновесятся. Увеличение "проседания", а вместе с ним и ошибки рассогласования на входе регулятора 4 прекращается.Таким образом, указанная ошибка отрабатывается регулятором 4 так, что момент на выходном валу компенсирует приложенную извне нагрузку, При этом статическая ошибка задающего следящего привода 1 может остаться ненулевой (если привод 1 не обладает ас-. татизмом) либо исчезнуть в случае астатического привода 1. В любом иэ описанных случаев привод 1 переходит в новое установившееся состояние,Для того, чтобы на выходном валу поддерживать уравновешивающий внешнюю нагрузку момент, постоянная составляющая тока 1, а следовательно, и выходного сигнала регулятора 4 - П (при условии линейности характеристики преобразователя 8) независимо от алгоритма его функционирования и ошибки в установившемся режиме должна быть пропорциональна внешней нагрузке на валу следящего привода 1.Работа исполнительного следящего привода 2 прн: компенсации внешних нагрузок, вызванных перемещаемым гру" зом, аналогична описанной с той лишь разницей, что преобразователь 10 преобразует выходной сигнал Б регулятора 5 в пропорциональный перепад давлений ьР в полостях гидродвигателя 11, который создает пропорциональный перепаду Ь Р момент противодействия нйгрузке на выходном валу исполнительного следящего привода 2.Таким образом, при приложении к выходным валам следящих приводов 1 и 2 внешних нагрузок на выходе регуляторов 4 н 5 возникают сигналы Б и Б, постоянные составляющие которых содержат информацию об этих нагрузках, а точнее им пропорциональны.В зависимости от разности сигна-, лов Б и П, выделяемой в сумматоре 14, блок 3 интегрирования (например блок двойного интегрирования) изменяет уставку х в направлении и со скоростью, пропорциональной указанной разности. Скорость движения выходных валов исполнительного 2 и задающего 1 следящих приводов пропорциональна разности моментных воздействий со стороны оператора и перемещаемой нагрузки.В случае наличия в сигналах Б и Бп высокочастотных составляющих, присутствующих при широтно- или частотноимпульсном управлении исполнительными частями 6 и 7 приводов 1 и 2, указанные составляющие не оказывают влияния на систему двустороннего действия, поскольку ослабляются в блоке.Ко каз 708/20 ВНИИПИ Гос по делам 113035 Моск-35, Раушска Пета СССРрытийнаб., д. исное ул. Проектная, 4 Производственно-полиграфическое предприятие, г. У 3 12964 3 интегрирования, имеющем свойства фильтра нижних частот, а также в самих следящих приводах 1 и 2 за счет их линейных, нелинейных искажений и ограниченности частотного спектра полосы пропускания.Реальные исполнительные части 6 и 7 всегда имеют запаздывание (инерцию), поэтому общие передаточные функции замкнутых по положению сле : дящих приводов 1 и 2 от сигнала Х к сигналам 11 и Ц будут иметь фазовое опережение, поскольку исполнительные части 6 и 7 включены в обратную связь при формировании ука, 15 занных передаточных функций, т.е. сигналы О и 0 возникают чуть раньше, чем компенсирующие моменты на валах следящих приводов 1 и 2, что благотворно сказывается на устойчивости внешнего контура системы двустороннего действия.При необходимости реализации задающего следящего привода 1 в виде электрогидро- либо электропневматического необходимо выполнить его исполнительную часть 6 аналогично исполнительной части 7 исполнительного следящего привода 2. При этом работа предлагаемой системы ни по функциям,ни по достигаемому результату не отличается от описанной. Формула изобретения Следящая система двустороннего действия, содержащая на задающей стороне последовательно соединенные первый регулятор, преобразователь тока и двигатель, связанный с первым датчиком положения, выход которого подключен к первому входу первого регулятора, на исполнительной стороне последовательно соединенные второй регулятор, электрогидропреобразователь и гидродвигатель, связанный с вторым датчиком положения, выход которого подключен к первому входу второго регулятора, а также последовательно соединенные сумматор и блок интегрирования, подключенный выходом к второму входу первого и второго регулятора, о т л и ч а ю щ а я с я тем, что, с целью упрощения и повыше ния динамической точности системы, в ней первый и второй входы сумматора соединены соответственно с выходом первого и второго регулятора.
СмотретьЗаявка
3862648, 04.03.1985
ДОНЕЦКОЕ ОТДЕЛЕНИЕ ИНСТИТУТА "ГИПРОУГЛЕАВТОМАТИЗАЦИЯ"
БАРАЦ ЮРИЙ МАРКОВИЧ, БЕЛОЦЕРКОВСКИЙ АЛЕКСАНДР АРТЕМОВИЧ, ЖУКОВ ЮРИЙ ПЕТРОВИЧ
МПК / Метки
МПК: B25J 13/00
Метки: двустороннего, действия, следящая
Опубликовано: 15.03.1987
Код ссылки
<a href="https://patents.su/3-1296404-sledyashhaya-sistema-dvustoronnego-dejjstviya.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система двустороннего действия</a>
Регулятор привода угольного струга

Номер патента: 301440
Опубликовано: 01.01.1971
Автор: Морозов
МПК: E21C 31/00
Метки: привода, регулятор, струга, угольного
...привода и постепенный запуск его на номинальный режим, который поддерживается при среднем положении диска д, находящегося под действием двух равных моментов, определяемых у 1 пругостью пружины И и усилением сервомотора 10 (на однои оси 17, но в противоположных направлениях) .Режим автоматического управления резанием.Двигатель привода 15 в зависимости от сопротивления массива угля замедляет свой ход или ускоряет его. Это изменение воспринимается тахогенератором 14 на оси двигателя. Таким образом, напряжение тахогенератора является индикатором величины усилий, воспринимаемых режущими органами струга.Скорость подачи импульсов на двигатель привода задается скоростью фрикционного ролика 6 и диска 5 от программного диска 1 в заьисимости...
Измеритель осевого усилия, преимущественно для измерения крутящего момента в механизме свинчивания труб с приводом от червячного вала

Номер патента: 954560
Опубликовано: 30.08.1982
Авторы: Воловац, Воронков, Головин, Макалов, Оловянишников, Рябихина, Шавин, Шефер
МПК: E21B 19/16
Метки: вала, измеритель, крутящего, механизме, момента, осевого, преимущественно, приводом, свинчивания, труб, усилия, червячного
...чертеже изображено усТройство, общий вид.Устройство состоит из корпуса 1, в котором размещены трубозажимное устройство 2 и червячная пара, состоящая из червячного вала 3 и червячного колеса 4, с которым жестко связано водило 5. Опорный узел червяка 3 включает радиальный подшипник 6 и двойной упорный подшипник 7, который размещен в ступице диска 8, являюшегося чувствительным элементом. Упорный подшипник 7 связан с червячным валом 3 и диском 8 упорными гайками 9 и 10. Диск 8, на котором размещена тензодатчики 11, укреплен на фланце 12 корпуса 1. Измерительный блок закрыт крышкой 13.954560 формула изобретения 1 йй рьевКорректор ЮПодписноетета СССРкрытийна 6., д. 4/5л Проектная 4 СостаТехред Тираж 6 И Государстве делам изобре осква, Ж -...
Забойный датчик для измерения осевой нагрузки и крутящего момента

Номер патента: 441391
Опубликовано: 30.08.1974
Авторы: Айзуппе, Костяницин, Куделина, Любарский, Мишунин, Павлова
МПК: E21B 44/00, E21B 44/04
Метки: датчик, забойный, крутящего, момента, нагрузки, осевой
...предохранительный стакан 6.5 Для измерения осевой нагрузки индуктивные преобразователи устанавливаются в плоскости, перпендикулярной оси, а при измерении крутящего момента в плоскости, параллельной оси цилиндра упругого элемента.10 На упругий элемент навернут предохранительный стакан, имеющий специальный буртик, упирающийся в такой же буртик 8 упругого элемента. При отсутствии нагрузки зазора между буртиками нет. Упругий чувстви тельный элемент и предохранительный стаканвыполнены из разных материалов, причем модуль упругости материала предохранительного стакана выше.В основе работы устройства лежит прин цип измерения деформации упругого элемента под действием осевой нагрузки и крутящего момента. Прп действии сжимающих усилий...
Следящая система с регулированием момента вала нагрузки

Номер патента: 1644083
Опубликовано: 23.04.1991
Автор: Дорохов
МПК: G05B 11/01
Метки: вала, момента, нагрузки, регулированием, следящая
...сумматора 12 сигнал проходит через первый сумматор 2 на вход первого исполнительного устройства 1, выход которого является выходом системы. Момент вала нагрузки с выхода первого исполнительного устройства 1 преобразуется датчиком 3 момента вала нагрузки в электрический сигнал, который поступает на вход нелинейного 40 элемента 4 и на первый вход блока 10 умножения. Система отслеживает координату положения входного вала. После вхождения системы в упор на управляющий вход ключевого элемента 9 поступает сигнал от датчика 8 фиксации начала вхождения системы в упор, и ключевой элемент 9 переходит из разомкнутого состояния в замкнутое, Сигнал от блока 10 поступает через ключевой элемент 9 и второй усилитель 11 на вычитающий вход второго...
Автоматический регулятор дистанционного действия

Номер патента: 122623
Опубликовано: 01.01.1959
Авторы: Петров, Рузский, Уланов, Шевяков
МПК: G05B 11/52
Метки: автоматический, действия, дистанционного, регулятор
...а также в резервуар 14. В результате происходит поворот лопасти 15 сервомотора и связанного с нею вала 16.При повороте вала 16 поворачивается кулачок 17, который воздействует через сильфоны 18 и 19 и заполнитель 20 обратной связи па пружину 21, изменяя ее потенциал и противодействуя дальнейшему перемещению подвижной катушки 6 преобразователя, Перемещение лопасти сервомотора прекращается в момент возврата золотника в нейтральное положение, Полости обеих пар сильфонов 18 и 19 могут сообщаться через дроссель 22, При полном закрытии этого дросселя осуществляется жесткая обратная связь, при неполном закрытии - изодромная обратная связь.Вал 16 сервомотора поворачивает также закрепленный на нем потенциометр 23, включенный в цепь нелинейной...
Предыдущий патент: Манипулятор
Следующий патент: Захватное устройство
Случайный патент: Способ предотвращения отложения солей в нефтепромысловом оборудовании