Устройство для программного управления следящим перемещением по ведущему перемещению
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
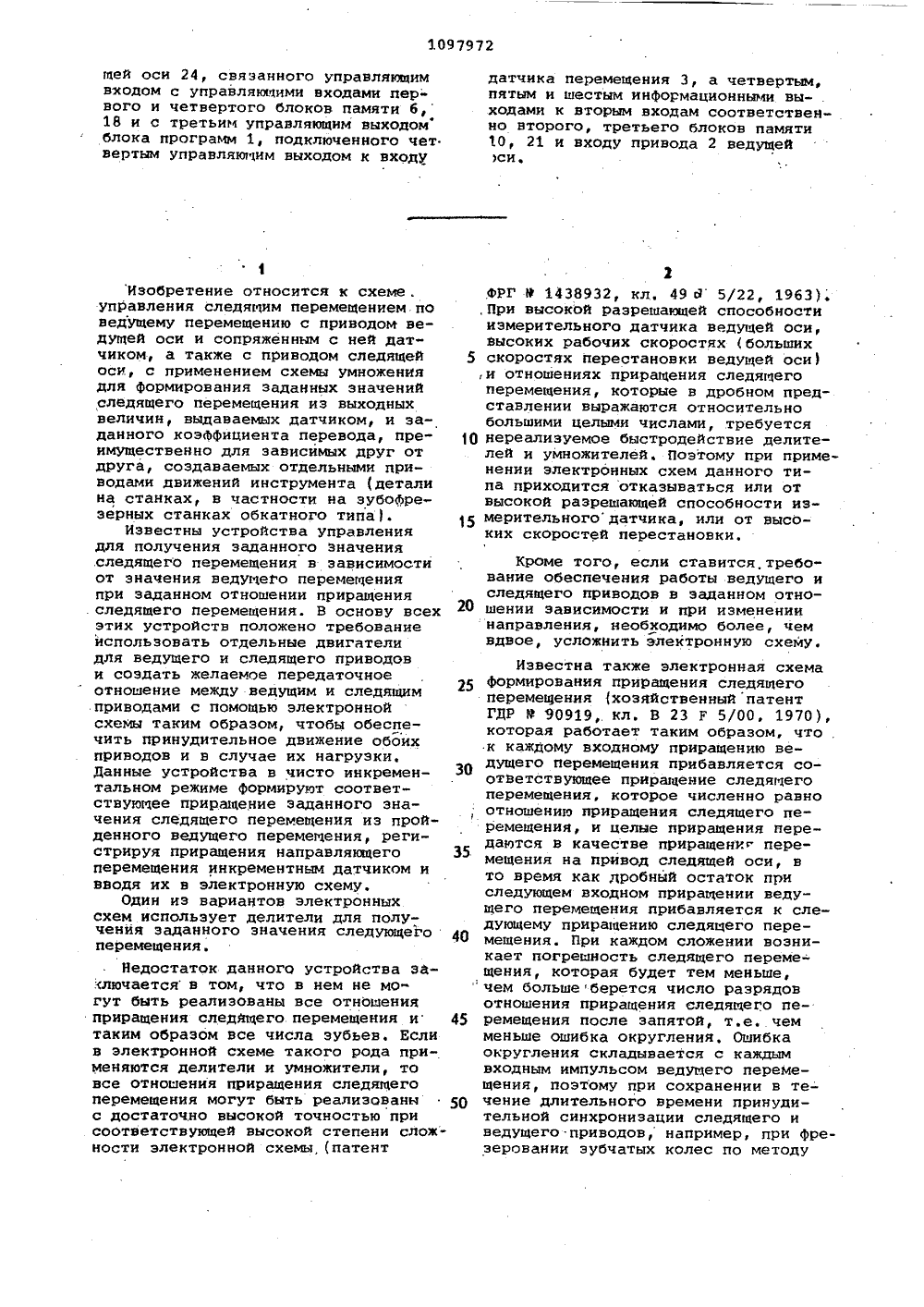
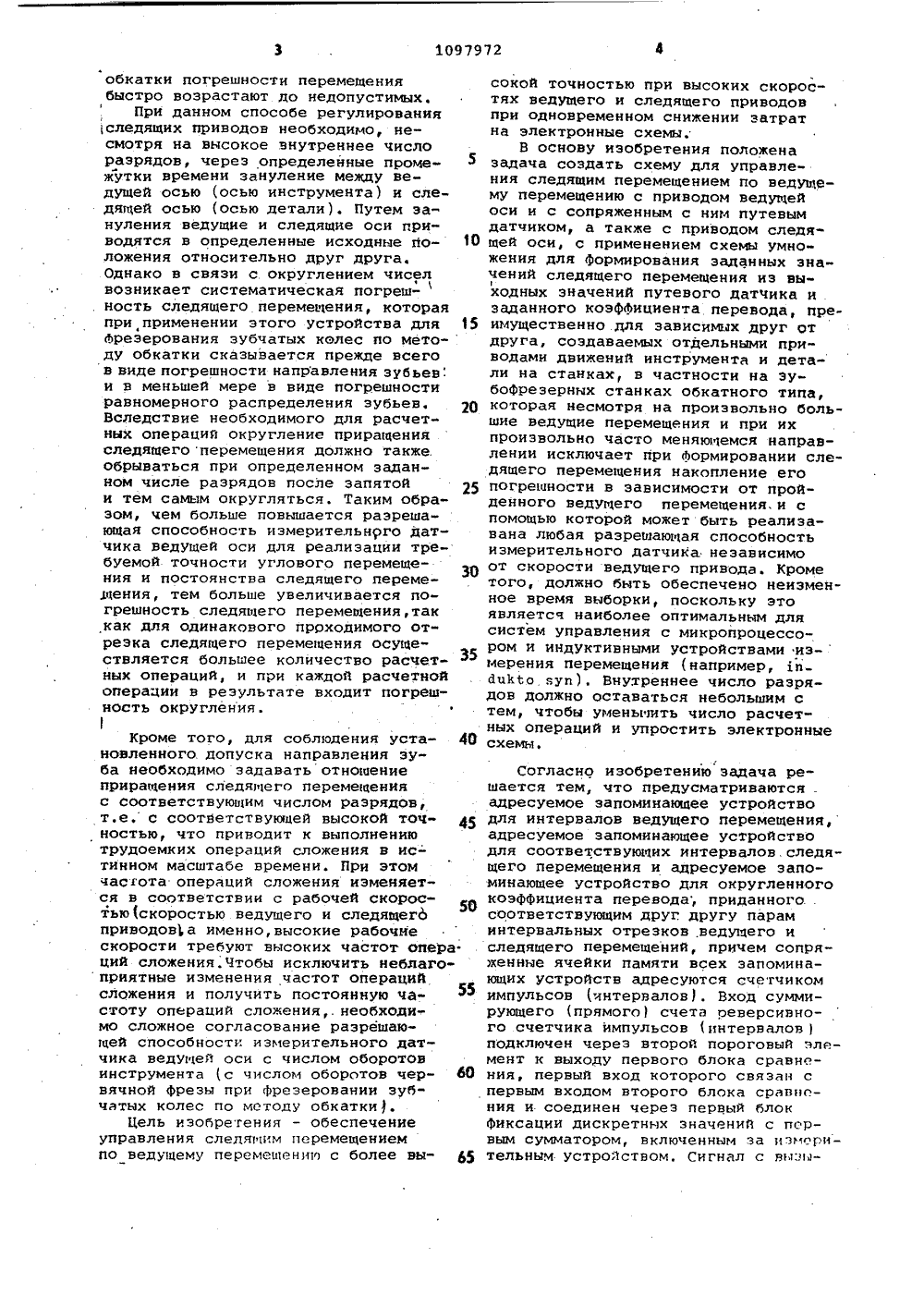
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 351;г 0 05 В 19 18 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРРО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОП(РЫТИЙ(54)(57) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ СЛЕДЯКГИМ ПЕРЕМЕЩЕНИЕМПО ВЕДУЩЕМУ ПЕРЕМЕЩЕНИЮ, содержащеепривод 2 ведущей оси, механическисвязанный с датчиком 3 перемещения,привод 24 следящей оси, узел умножения 16, блок 1 программ, о т л ич а ю щ е е с я тем, что в неговведены первый, второй,.третий ичетвертый блоки памяти 6, 10, 21, 18реверсивныйсчетчик 15 импульсов,первый и второй пороговый элементы12, 11, первый и второй блоки сравнения 7,8, первый и второй блокиФиксации дискретных значений 5, 23,мультиплексор 14, первый, второй,третий инверторы 9, 22, 19, блоквентилей 20, первый сумматор 17,элемент НЕ-ИЛИ 13 и второй сумматор4, подключенный первым входом к выходу датчика 3 перемещения, вторымвходом - к первому информационномувыходу блока программ 1, третьимвходом - к выходу первого блокапамяти 6, а выходом - к инФормационному входу первого блока Фиксациидискретных значений 5, соединенногоуправляющим входом с первнм управляющим выходом блока программ 1, авыходом - с входом первого порогового элемента 12, с пепвнм инФормационным входом мультиплексора 14.с червыгли входами первого и второго.801097972 А блоков сравнения 7,8, подключенныхвторыми входами соответственно через первый инвертор 9 и непосредственно к выходу второго блока памяти 10, а выходами соответственнок второму информационному входумультиплексора 14, к входу второгопорогового элемента 11 и к третьемуинформационному входу мультиплексора 14, связанного первым управляющим входом с выходом элемента НЕИЛИ 13 вторым управляющим входомс первым входом элемента НЕ-ИЛИ 13,с выходом второго порогового элемента 11, с суммирующим входом реверсивного счетчика импульсов 15 ис первыгл управляющигл входом блока 9вентилей 20, третьим управляющимвходом - с выходогл первого порогового элемента 12, с вычитающим вхо 1дом реверсивного счетчика импульсов 15, с вторым входом элемента НЕИЛИ 13 и вторым управляющим входомблока вентилей 20, э выходом - синформационным входом первого блокапамяти 6 и с первым входом узла 4 Румножения 16, подключенного вторым врвходом к второму инфорглациднномувглходу блока программ 1 и счетному ф 3входу реверсивного счетчика импуль- Ясов и первым входом второго и третье.го блоков памяти 10, 21, третьимвходом - к третьему информационному Явыходу блока программ 1, а выходом -,к информационному входу четвертогрблока памяти 18 и к первому входупервого сумматора 17, соединенноговторым входом с выходом блока венти- )файфлей 20, третьим входом через третийинвертор 19 - с выходом четвертогоблока памяти 18, а выходом - с информационным входом второго блокафиксации 23, подключенного управляю-щим входом ко второму управляющемувыходу блока программ 1, выходом кинформационному входу привода слеля1097972 10 15 20 25 3035 40 45 50 цей оси 24, связанного управляющим входом с управляющими входами первого и четвертого блоков памяти б, 18 и с третьим управляющим выходом блока программ 1, подключенного чет вертым управлякиим выходом к входу Изобретение относится к схеме . управления следящим перемещением по ведущему перемещению с приводом ведущей оси и сопряженным с ней датчиком, а также с приводом следящей оси, с применением схемы умножения для формирования заданных значений следящего перемещения из выходных величин, выдаваемых датчиком, и заданного коэФФициента перевода, преимущественно для зависимых друг от друга, создаваемых отдельными приводами движений инструмента (детали на станках, в частности на зубофреэерных станках обкатного типа.Известны устройства управления для получения заданного значения .следящего перемещения в зависимости от значения ведущего перемещения при заданном отношении приращения следящего перемещения. В оснону всех этих устройств положено требование использовать отдельные двигатели для ведущего и следящего приводов и создать желаемое передаточное отношение между ведущим и следящим приводами с помоцью электронной схемы таким образом, чтобы обеспечить принудительное движение обоих приводов и н случае их нагрузки.Данные устройства в чисто инкрементальном режиме формируют соответствующее приращение заданного значения следяцего перемецения из пройденного ведущего перемещения, регистрируя приращения направляющего перемещения инкрементным датчиком и вводя их в электронную схему.Один из вариантов электронных схем использует делители для получения заданного значения следующего перемещенияНедостаток данного устройства за:ключается в том, что в нем не могут быть реализованы все отношения приращения следйщего перемещения и таким образом все числа зубьев. Если в электронной схеме такого рода применяются делители и умножители, то все отношения приращения следящего перемещения могут быть реализованы с достаточно высокой точностью при соотнетствующей высокой степени сложности электронной схемы,(патент датчика перемецения 3, а четвертым,пятым и шестым информационными вы- .ходами к вторым входам соответственно нторого, третьего блоков памяти10, 21 и входу привода 2 ведущейси. 2ФРГ М 1438932, кл, 49 д 5/22, 1963), При высокой разрешающей способности измерительного датчика ведущей оси, высоких рабочих скоростях (больших скоростях перестановки ведущей оси),и отношениях приращения следящего перемещения, которые в дробном представлении выражаются относительнобольшими целыми числами, требуетсянереализуемое быстродействие делителей и умножителей. Поэтому при применении электронных схем данного типа приходится отказываться или отвысокой разрешающей способности измерительногодатчика, или от высоких скоростей перестановки,Кроме того, если ставится требо" нацие обеспечения работы ведущего и следящего приводов в заданном отношении зависимости и при изменении направления, необходимо более, чем вдвое, усложнить электронную схему. Известна также электронная схема Формирования приращения следящего перемещения (хозяйственный патент ГДР В 90919, кл. В 23 Р 5/00, 1970), которая работает таким образом, что . к каждому входному приращению ведущего перемещения прибавляется соответствующее приращение следящего перемещения, которое численно равно отношению приращения следяцего перемещения, и целые приращения передаются в качестве приращениг перемецения на привод следящей оси, в то время как дробный остаток при следующем входном приращении ведущего перемещения прибавляется к следующему приращению следящего перемещения. При каждом сложении возникает погрешность следящего перемещения, которая будет тем меньше, чем большеберется число разрядов отношения приращения следящего перемещения после запятой, т.ечем меньше ошибка округления, Ошибка округления складывается с каждым входным импульсом ведущего перемещения, поэтому при сохранении в течение длительного нремени принудительной синхронизации следящего и ведуцего-приводов, например, при Фрезеронании зубчатых колес по методуобкатки погрешности перемещения быстро возрастают до недопустимых,При данном способе регулирования следящих приводов необходимо, несмотря на высокое внутреннее число разрядов, через определенные промежутки времени зануление между ведущей осью (осью инструмента) и следящей осью (осью детали). Путем зануления ведущие и следящие оси приводятся в определенные исходные по ложения относительно друг друга. Однако в связи с округлением чисел возникает систематическая погреш. ность следящего перемещения, которая при применении этого устройства для 15 Ареэерования зубчатых колес по мето-ду обкатки сказывается прежде всего в виде погрешности направления зубьев и в меньшей мере н виде погрешности равномерного распределения зубьев. 2 О Вследствие необходимого для расчетных операций округление приращения следящего перемещения должно также, обрываться при определенном заданном числе разрядов после запятой 25 и тем самым округляться. Таким образом, чем больше повышается разрешающая способность измерительнрго датчика ведущей оси для реализации требуемой точности углового перемещения и постоянства следящего перемещения, тем больше увеличивается погрешность следящего перемещения,так как для одинакового пррходимого отрезка следящего перемещения осуществляется большее количество расчетнык операций, и при каждой расчетной операции в результате входит погрешность округления. Кроме того, для соблюдения уста новленного допуска направления зуба необходимо задавать отношение приращения следящего перемещения с соответствующим числом разрядов, т.е. с соответствующей высокой точ ностью, что приводит к выполнению трудоемких операций сложения в ис- тинном масштабе времени. При этом частота операций сложения изменяется в соответствии с рабочей скоростью(скоростью ведущего и следящего 1 приводов),а именно, высокие рабочие скорости требуют высоких частот опера. ций сложения. Чтобы исключить неблагоприятные изменения частот операций сложения и получить постоянную частоту операций сложения,.необходимо сложное согласование разрешающей способности измерительного датчика ведущей оси с числом оборотов инструмента (с числом оборотов чер- бО вячной Фрезы при Фрезеровании зубчатых колес по методу обкатки ).Цель изобретения - обеспечение управления следяк 1 им перемещением по ведущему перемещению с более вы- б 5 сокой точностью при высоких скоростях ведущего и следящего приводов при одновременном снижении затрат на электронные схемы;В основу изобретения положена задача создать схему для управления следящим перемещением по недущему перемещению с приводом ведущей оси н с сопряженным с ним путевым датчиком, а также с приводом следящей оси, с применением схемы умножения для Формирования заданных значений следящего перемещения из выходных значений путевого датчика и заданного коэффициента перевода, преимущественно для зависимых друг от друга, создаваемых отдельными приводами движений инструмента и детали на станках, в частности на зубофрезерных станках обкатного типа, которая несмотря на произвольно большие недущие перемещения и при их произвольно часто меняющемся направлении исключает при Формировании следящего перемещения накопление его погрешности в зависимости от пройденного ведущего перемещения,и с помощью которой может быть реализавана любая разрешающая способность измерительного датчика незанисимо от скорости ведущего привода. Кроме того, должно быть обеспечено неизменное время выборки, поскольку это янляетсч наиболее оптимальным для систем управления с микропроцессором и индуктивными устройствами измерения перемещения (например, 1 в йцМо.нуп). Внутреннее число разрядон должно оставаться небольшим с тем, чтобы уменьшить число расчетных операций и упростить электронные схемы. Согласно изобретению задача решается тем, что предусматриваются адресуемое запоминающее устройство для интервалов ведущего перемещения, адресуемое запоминающее устройство для соответствующих интервалов, следящего перемещения и адресуемое запоминающее устройство для округленного коэффициента перевода; приданного. соответствующим друг, другу парам интервальных отрезков ведущего и следящего перемещений, причем сопряженные ячейки памяти всех запоминающих устройств адресуются счетчиком импульсов (лнтерналон). Вход суммирующего (прямого) счета ренерсинного счетчика импульсов (интерналов ) подключен через второй пороговый элемент к выходу первого блока сравнения, первый вход которого связан с первым входом второго блока сравне - ния и соединен через первый блок Фиксации дискретных значений с псрвым сумматором, включенным за измери- тельным устройством. Сигнал с вызы 1097972ваемой ячейки памяти интервалов ведущего перемещения подается на второй вход первого блока сравнения с отрицательным знаком, а на второй вход второго блока сравнения с положительным знаком. Кроме того,вычитающий вход (обратного счета ) реверсивного счетчика импульсов (интервалов) подключен через первый пороговый элемент и первый блок Фиксации к выходу первого сумматора. 10Выход первого и второго блоков сравнения, а также выход первого сумматора связаны через управляемый первым и вторым пороговыми элементами мультиплексор с блоком умножения 15 и первым блоком памяти, выход которого соединен с третьим входом первого сумматора. Выход блока умножения связан с .вторым суиматором и четвертым блоком памяти, причем на второй вход второго сумматора подключен третий блок памяти для интервалов следящего перемещения через управляемую пороговыми элементами блок вентилей, а на третий вход - сигнал с выхода четвертого блока памяти с отрицательным знаком. Выход второго сумматора связан через второй блок Фиксации с входом заданного значения привода следящей оси.Пример осуществления изобретения.На Фиг.1 представлена структурная схема управления следящим перемещением; на Фиг.2 - внутренняя структура блока умножения 16.Блок программ 1 предусмотрен для координации отдельных частей схемы управления следящим перемещением в установленной временной последовательности. Привод ведущей оси 2 механически сопряжен с датчиком 3 пе ремещения. Электрический выход датчика 3 соединен с входом второго сумматора 4, на выход которого подключен блок Фиксации дискретных значений 5, Второй сумматор 4 имеет два других входа, один из которых связан с блоком программ 1 с целью наладки и калибровки, а второй - с блоком памяти б достигнутого относительного ведущего перемещЕния. Выход блока фиксации дискретных значений 5 связан с первым блоком сравнения 7 и вторым блоком сравнения 8, Первый блок сравнения 7 через инвертор 9, а второй блок сравнения 8 непосредственно связаны с вторИм блоком памяти 10 для интервалов ведущего перемещения, Выход первого блока сравнения 7 соединен с вторым пороговым элементом 11, а выход блока Фиксации дискретных значений 5 - с первым по роговым элементом 12. Оба порогОвых элемента 11, 12 связаны с элементом НЕ-ИЛИ 13, выход которого как и прямые выходы обоих пороговых элементов 11, 12 связан с мультиплексором 65 14. Счетчик импульсов интервалов)15, включающий ячейки памяти в запоминающих устройствах на вывод в соответствии с номером интервала, присоединен по суммирующему входу прямого счета) к выходу первого порогового элемента 11, а по вычитающемувходу (обратного счета) - к выходувторого порогового элемента 12, Мультиплексор 14 имеет три входа, которыемогут по выбору подключатьмя на блокумножения 16, При этом возможновключение на вход блока умножения 16выхода первого блока сравнения 7 через мультиплексор 14, управляеиыйв случае этой связи с выхода порогового элемента 11, На вход блока умножения 16 может включаться также выход второго блока сравнения 8 черезмультиплексор 14, управляемый в данном случае с выхода порогового элемента 12. Кроме того, вход блока умножения 16 может соединяться с выходом блока фиксации дискретных зна"чений 5 через мультиплексор 14, кото.рый в этом случае управляется с выхода элемента НЕ-ИЛИ 13, Выход блокаумножения 16 .соединен с входом первого сумматора 17 и блоком памяти18, выход которого через инвертор 19подключен к другому входу первогосумматора 17. Третий вход сумматора17 связан через блок вентилей 20 сблоком памяти 21 для интервалов следящего перемещения, Блок вентилей 20имеет два взаимоисключаецих направления пропускания, из которых одно может быть представлено непосредственным соединением блока памяти 21 с репервым сумматором 17 и управлениекоторым осуществляется с выхода порогового элемента 11. Второе направление пропускания от блока памяти 21к сумматору 17, в котором промежуточно включен инвертор 22, управляется с выхода порогового элемента 12,Сигнал с выхода сумматора 17 подается через блок Фиксации дискретных значений 23 на вход заданного значения приращения привода следящей оси 24.Блок умножения 16 (Фиг.2 состоит из адресуемого счетчиком интервалов 15 запоминающего устройства 25, в памяти, которого содержатся коэффициенты перевода, приданные интервалам.Выход запоминающего устройства 25 связан с собственным уиножителем 26 по входу множителя, а выход мультиплексора 14 подключен на умножитель 26 по входу множимого. Произведение с выхода умножителя 26 подается на звено округления 27, также находящееся в блоке уиножения 1 б.Блоки памяти 10 и 18 для интервалов ведущего и следящего перемеиеиия, а также запоминающее устройство 25 для запоминания коэффициентов перевода для записи соответствующих величин связаны с блоком программ 1. Измерительный датчик 3, первый блок фиксации дискретных значений 5, 5 первый блок памяти 6, блок умножения 16, четвертый блок памяти 18, второй блок фиксации дискретных значений 23 и привод следящей оси 24 также связаны с блоком программ 1. 10Устройство работает следующим образом.Блок программ 1 вырабатывает в ритме времени выборки последовательные тактовые сигналы запроса для 15 управления перечисленными выше элементами схемы. Привод ведущей оси 2, работающий с любой заранее заданной скоростью, приводит в действие измерительный датчик 3, который выдает на сумматор 4 пройденный с момента последней выборки путь. Величина, полученная в результате суммирования, Фиксируется блоком Фиксации дискретных значений 5 и сравнивается в первом блоке сравнения 725 с отрицательным значением интервала ,ведущего перемещения в блоке памяти 10. В случае превышения предельного значения интервала ведущего перемещения добавленное значение ведущего перемещения для случая движения привода ведущей оси 2 вперед уменьшается на значение интервала ведущего перемещения из памяти 10 до нового относительного значения ведущего перемещения, которое выдается теперь блоком сравнения .7.Изменение знака на выходе блока сравнения 7 при превышении границы интервала вперед приводит к пере ключению порогового элемента 11, ко- . торый соединяет выход блока сравнения 7 с блоком умножения 16 и блоком памяти 6. Таким образом, от относительного значения ведущего перемеще ния, подаваемого до сих пор от блока фиксации 5 через активированную элементом НЕ-ИЛИ 13 ветвь мультиплексора 14 в блоке умножения 16, отсчитываемого от начала предыдущего ин тервала, отнимается значение интервала ведущего перемещения, записанное в памяти, так что новое относительное зна%ение ведущего перемещения, отсчить 1 вается от начала нового интервала. Кроме того, пороговый элемент 11 закрывает блок вентилей 20 в ветви, которая передает на сумматор 17 записанную в блоке памяти 21 величину интервала следящего перемещения, отнесенную к нарушенной границе интервала, и таким образом следящее переме ение увеличивается. Пороговый элемент 11 повышает сддержание счетчика импульсов (интервалов ) 15 на единицу. 65 При каждом измерении актуальное относительное значение ведущего перемещения Фиксируется в блоке памяти 6 и учитывается для продолженйя, ведущего перемещения, т.е. суммируется с выходным значением измерительного датчика 3 в первом сумматоре 4.Блок умножения 16 опредеЛяет по существу в данное время относительному значению ведущего перемещения с учетом коэФФициента перевода, вызванного счетчиком (интервалов 15, округленное относительное значение следящего перемещения, которое возрастает от выборки к выборке при движении вперед привода ведущей оси 2. По актуальному относительному значению следящего перемещения и округленному относительному значению следящего перемещения, промежуточно запомненному при предыдущей выборке, а также по значению отрезка следящего перемещения, вызванному из блока памяти 21 при превышении границы интервала, определяется приращение( следящего перемещения и подается иа привод следящей оси 24, При каждой выборке округленное Значение следящего перемещения, установленное блоком умножения 16, фиксируется в блоке памяти 18. В случае движения привода ведущей оси 2 вперед значение ведущего перемещения,. пройденного в обратном направлении, т.е.уменьшенное ведущее перемещение, добавляется во втором блоке сравнения 8 к зафиксированному значению отрезка ведущего перемещения, Если уменьпенное ведущее перемещение окаэывается равным нулю или меньше нуля, то срабатывает пороговый элемент 12, который уменьшает содержание счетчика (интервалов) 15 на единицу. Одновременно выходной сигнал блока сравнения 8 через ветвь мультиплексора активированную пороговым элементом 12подается на блок умножения 16 и обрабатывается там таким же образом, как это было описано для направления движения вперед. Кромеътого, пороговый элемент 12 закрывает блок вентилей 20.в той ветви мультиплексора, которая подает величину отрезка следящего перемещения, записанную в блоке памяти 21, через инвертор 22 на сумматор 17 и тем самым уменьшает относительное следящее перемещение на значение отрезка следящего перемещения, заФиксированное в памяти, относящееся к нарушенной границе интервала. В сумматоре 17 определяется приращение следящего перемещения в зависимости от цикла выборки и через блок фиксации 23 подается на привод следящей оси 24.В пределах интервала приращение 1 следящего перемещения получаетсякак разность путем сложения зафиксированного в промежуточной памяти значения следящего перемещения для предыдущего цикла выборки с отрицательным знаком инвертор 19с актуальным относительным значением следящего Перемещения. В случае превышения границы интервала соответствующая заФиксированная в памяти ве О личина отрезка следящего перемещения учитывается,при определении приращения следящего перемещения в сумматоре 17 путем добавления ее при движении вперед с положительным знаком, а при движении назад - с отрицательным знаком (управление от блока вентилей 20. Вследствие этого в пределах периода выборки требуются лишь очень простые операции 20 умножения с округленными величинами для Формирования заданного значения следящего перемещения из значения ведущего перемещения, которые поэтому выполняются за кратчайшее время. Формируемое заданное значение следящего перемещения не.может привести в пределах интервала к какой-либо накапливающейся ошибке позиционирования привода следящей оси 24, так как вследствие Формирования разности исключается предыдущая ошибка позиционирования и остается только ошибка округления актуального относительного заданного значения следящего перемещения, которая З 5 исключается вследствие Формирования разности в сочетании с соответствующим зафиксированным в памяти значе. нием отрезка следящего перемещения, Абсолютно точное значение следяще го перемещения получалось бы всегда в том случае, если бы момент измерения совпадал с достижением границы интервала, так как тогда у каждой границы интервала погрешность задан ного значения следящего перемещения, обусловленная сФормированным округленным заданным значением следящего перемещения, исключалась бы полностью.В связи с этим принципом неэасисимо от пути приводов ведущей и следящей осей устройство, построенное на простых элементах и блоках памяти с незначительным объемом памяти, позволяет выполнять очень точное и.непрерывное управление следящим перемещением по ведущему перемещению.Сопряженная отработка отрезков ведущего перемещения, так же как и следящего перемещения, обеспечивает сколь угодно длительную и безошибочную синхронизацию при малом числе разрядов в расчетных и запоминающих блоках устройства, что приводит к незначительным затратам.Кроме того, при неизменном времени выборки можно реализовать высокую рабочую скорость инструмента при высокой разрешающей способности измерительного датчика. Устройство согласно изобретению без принятия специальных мер также позволяет реализовать режимы работы ."деление на отдельные части" и "калибровками, необходимые для зубофрезерных станков обкатного типа, задавая от блока 1 при выключенном ведущем приводе 2 имитированные значения приращения ведущего перемещения на сумматоре 4, вследствие чего устройство согласно заданному отношению перевода Формирует соответствующее приращение следящего перемещения,Устройство можно также применить для Формирования части заданного сле-. дящего перемещения, необходимой дополнительно при Фрезеровании колес с косыми зубьями по сравнению с колесами с прямыми зубьями. При этом сложение обеих частей следящего перемещения осуществляется в следящем приводе 24.1097972 9 Тираж 842НИИПИ Государственного комитета Спо делам изобретений и открытий3035, Москва, З, Раушская наб.л ППП "Патеитф, г. Ужгород, ул. Пр ПодпР аз 4206/3 В
СмотретьЗаявка
7771029, 16.01.1980
ФЕБ ВЕРКЦЕУГМАШИНЕНКОМБИНАТ "7 ОКТОБЕР"
ШЛЕЙХЕР ЗИГФРИД, СФАКС ЭГОН, ХЕЙЛАНД ВЕРНЕР, КЕЛЛЕР ЙОХЕН, КЛУГЕ ХАНС-ЙОАХИМ, УЛРИХ ПЕТЕР
МПК / Метки
МПК: G05B 19/18
Метки: ведущему, перемещением, перемещению, программного, следящим
Опубликовано: 15.06.1984
Код ссылки
<a href="https://patents.su/7-1097972-ustrojjstvo-dlya-programmnogo-upravleniya-sledyashhim-peremeshheniem-po-vedushhemu-peremeshheniyu.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления следящим перемещением по ведущему перемещению</a>
Блок ведущего вала

Номер патента: 489151
Опубликовано: 25.10.1975
Авторы: Бабилюс, Бауба, Канапенас, Ляпин, Статкявичюс
МПК: G11B 15/18
...ведущий вал, установленныйна двух боковых и одной торцовой опоре,применяемым в основном в лентопротяжных механизмах аппаратов магнитной записи. Кроме того, устройства такого родамогут быть применены в любом механизмегде необходима повышенная точность вращения вала и минимальные энергетическиезатраты на приведение его во вращение,Известно использование ведущего валав лентопротяжных механизмах аппаратовмагнитной записи, Однако в таких устройствах величина трения между ведущим валом и его опорами весьма ощутима, и еслиоказывается возможным сделать ее относительно малой, то достигается это путемуСло 1 кнейия конструкции блока ведущеговала,К, 3, Бауба, Р, В. Статкявичюяпин489 151 Предмет изобретения Блок ведущего вала, например,...
Устройство для переключения резервируемых блоков системы телеуправления

Номер патента: 1032601
Опубликовано: 30.07.1983
Авторы: Галантерник, Калинин, Корольков, Литвинов
МПК: H05K 10/00
Метки: блоков, переключения, резервируемых, системы, телеуправления
...блока 2, вход опроса которого соединен с выходом счетчика, 7 пери- . ода контроля и первым входом элемента И 3, второй вход которого соединен с выходом запоминающего блока 2, выход элемента И 3 соединен с открывающими входами первого и второго управляемых вентилей 11 и. 12 и с уп" равляющим входом счетчика 1.3 импугьсов, закрывающий вход второго управляемого;вентиля 12 соединен с выходом первого генератора 4 тактовых импульсов,и тактовым входом первого генератора 5 И-последовательности,ин;.зУформационный вход, второго- управляемого вентиля 12 соединен с выходом счетчика 13 импульсов и закрывающим входом первого управляемого вентиля 11, выхор втооого управляемого венВтиля 12 соединен с. запускающим вхо дом первого генератора, 4 тактовых...
Устройство для контроля входа и выхода рабочих и служащих

Номер патента: 615514
Опубликовано: 15.07.1978
Авторы: Козинцев, Морозов, Покидаев, Шаровар
МПК: G07C 1/10
Метки: входа, выхода, рабочих, служащих
...открывается сигналом, вырабатываемым формирователем 13 опроса регистра анализа, Появившийся сигнал на ее выходе проходит через элемент ИЛИ 25 на формирователе 8 выходной информации, который под действием этого сигнала вырабатывает ответную информацию, разрешающую вход на объект по шйне 12, й сигйал 5 10 15 20 25 30 35 40 45 50 55 60 65 на элемент И 40. Элемент И 40, подготовленный по другому входу блоком 1 приема команд, срабатывает и появившийся сигнал на его выходе поступает через элемент ИЛИ 42 на элементы И 30, 31 блока 10 корректива и через элемент ИЛИ 6 на блок памяти 9 и второй формирователь 18 сигналов управления блоком памяти, В результате избирательная схема 31 выбранного дешифратора 4 информативного узла 27 срабатывает...
Устройство для адресации памяти

Номер патента: 1481760
Опубликовано: 23.05.1989
Авторы: Лозбенев, Пархоменко, Черняев
МПК: G06F 12/00, G06F 9/36
...третьем - 096 (РЕТ).Элемент И 6 необходим для того, чтобы отличить коды команд перехода от данных, которые могут иметь тот же код (команды сопровождаются сигналом М 1). Положительный импульс на выходе элемента И 6 по заднему фронту устанавливает триггер 8 в единичное состояние, положительный перепад через время, обусловленное элементом 7 задержки, появляется на первом входе элемента И 5, Время задержки элемента 7 подобрано так, что не происходит совпадения положительных уровней на выходе элемента 7 задержки и сигнала М 1 команды, во время которой произошло переключение (в нашем случае команды СА 11.). Далее микропроцессор выполняет действия, предписанные командой СА 1.1При приходе любой следующей команды сигнал первого машинного цикла...
Цифровой стробоскопический преобразователь периодических электрических сигналов

Номер патента: 1087896
Опубликовано: 23.04.1984
Автор: Гуляев
МПК: G01R 13/02
Метки: периодических, сигналов, стробоскопический, цифровой, электрических
...25 памяти,Первый вход смесителя 3 соединенс шиной входного сигнала, второйвход - с выходом генератора 2 стробимпульсов, а выход - с входом уси- , Олителя-расширителя 4, выход которого подключен к входу АЦП 5, выходомсвязанного с. первым входом блока11 вычитания и входом первого регистра 6, выход которого соединен с входом второго регистра 9 и вторым входом:блока 11 вычитания,выходом знака связанного с первым входом первого, триг-.1,гера 19 и первым входом блока 18 совпадений,второй вход которого соединен с 20выходом первого триггера 19,а выход - с первым входом первого элемента И 17, второй вход которого подключен к выходу первого блока 12сравнения кодов, а выход . - к управ- д 5ляющему входу блока 23 вычислений,первый, информационный...
Предыдущий патент: Цикловая система программного управления манипулятором
Следующий патент: Устройство для контроля времени переходного процесса
Случайный патент: Способ получения 2, 6-дилитий-1-алкилбензолов