Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
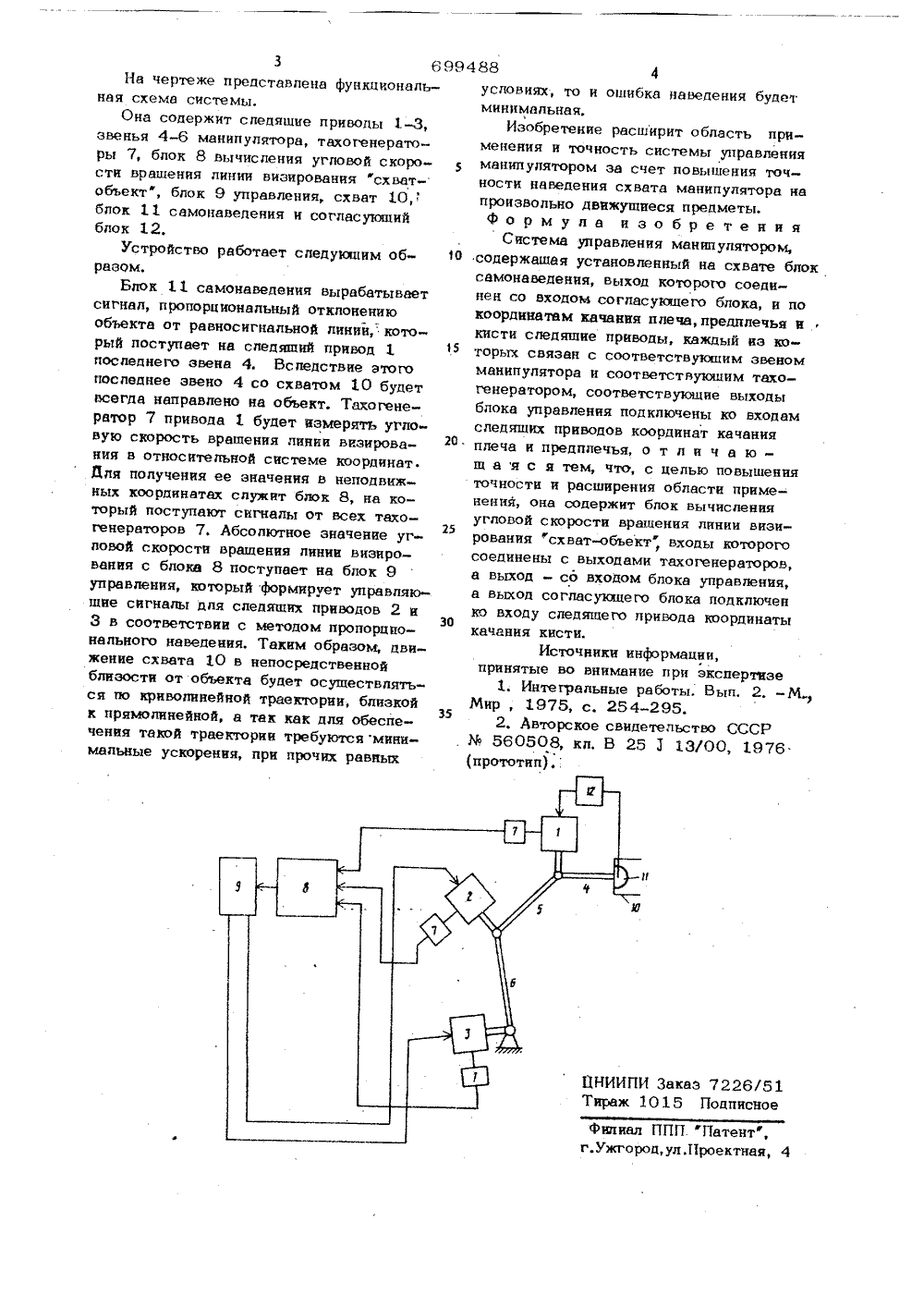
Союз Советски кСоциалистически креспублик(51)М. Кл, б 05 В 11/00 Веударетеапп 4 квинтет ср ао делам нзебретеннй н вткрмтнй(72) Авторы изобретения г Московское ордена Пекина н ордена Трудового Красного Знамени высшее техническое учнлнше им. Н. Э. Баумана(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯРУРОМ Изобретение относится к робототехнике н может быть использовано прн создании с нстем управления манипуляторами, работающих с подвижными объектамнИзвестна система управления манилу 5ляторами содержащая для повышенияточности наведения схвата на произвольно движущиеся предметы телевизионнуюустановку и вычислительный блок, имевшаяся в своем контуре ЦВ М, н которая может наводнтьс я. только на медленно двнжушиеся предметы, положение которых существенно не изменяется за время обработки зрительной информации 1,Наиболее близким техническим реше 15пнем к изобретению является система,содержащая установленный на схвате блоксаьвнаведення, выход которого соединен совходом согласующего блока, и по коор-динатам качания плеча, предплечья и кнс-тнследящие приводы, каждый нз которых связан с соответствующим звеномманипулятора н соответствуюшим тахогенератором, соответствующие выходывлока управления подключены ко входамследящих приводов координат качанпяплеча н предплечья, При работе такойсистемы управления возникяют большиеошибки прн наведении схвата на произвольно движущиеся объекты. Эго происходят из-за того, что при формированиивектора скоростн схвата, т.е. скоростис которой схват подходит к объекту, неучитывается информация о движенииобье ктвд 3,Целью изобретения является повышение точности и расширения области применения системы.Для атого известная система содержит блок вычисления угловой скорости вращения линни визирования "схватобъект, входы которого соединены с выходамн тахогенераторов, а выход - со. входом блока управления, а выход согласующего блока подключен ко входу следящего привода координаты качания кисти,3 6На чертеже представлена функциональная схема системы.Она содержит следящие приводы 1-3, звенья 4-6 манипулятора, тахогенераторы 7, блок 8 вычисления угловой скорости вращения линии визирования схватобьект, блок 9 управления, схват 10, блок 11 самонаведения и согласующий блок 12.Устройство работает следукхцим образом.Блок 11 самонаведения вырабатывает сигнал, пропорциональный отклонению объекта от равноснгнальной линии, который поступает на следящий привод 1 последнего звена 4. Вследствие этого последнее звено 4 со схватом 10 будет всегда направлено на объект. Тахогенератор 7 привода 1 будет измерять угловую скорость вращения линии визирования в относительной системе координат. бля получения ее значения в неподвижных координатах служит блок 8, на который поступают сигналы от всех тахо- генераторов 7. Абсолютное значение угловой скорости вращения линии визирования с блока 8 поступает на блок 9 управления, который формирует управляющие сигналы для следящих приводов 2 и 3 в соответствии с методом пропорционального наведения, Таким образом, движение схвата 10 в непосредственной близости от объекта будет осуществляться по криволинейной траектории, близкой к прямолинейной, а так как для обеспечения такой траектории требуются минимальные ускорения, при прочих равных аказ 7226/1 5 Подписно ПП. фПатентф, ул Проектная.Ужг 99488условиях, то и ошибка наведения будетминимальная,Изобретение расширит область применения и точность системы управленияманипулятором за счет повышения точности наведения схвата манипулятора напроизвольно движущиеся предметы,Формула изобретенияСистема управления манипулятором,10 содержащая установленный на схвате блоксамонаведения, выход которого соединен со входом согласующего блока, и покоординатам качания плеча, предплечья икисти следящие приводы, каждый из юторых связан с соответствующим звеномманипулятора и соответствукхцим тахогенератором, соответствующие выходыблока управления подключены ко входамследящих приводов координат качанияплеча и предплечья, о т л и ч а ющ а я с я тем, что, с целью повышенияточности и расширения области применения, она содержит блок вычисленияугловой скорости вращения линии визи 25рования схват-сбъект, входы которогоФсоединены с выходами тахогенераторов,а выход - со входом блока управления,а выход согласующего блока подключенко входу следящего привода координаты30качания кисти.Источники информации,принятые во внимание при экспертизе1, Интегральные работы, Вып, 2. -ММнр, 1975, с. 254-295.352, Авторское свидетельство СССР
СмотретьЗаявка
2598675, 07.03.1978
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
ИВКИН АРТУР МИХАЙЛОВИЧ, КУДРЯШОВ ВЛАДИМИР БОРИСОВИЧ, ЮЩЕНКО АРКАДИЙ СЕМЕНОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: манипулятором
Опубликовано: 25.11.1979
Код ссылки
<a href="https://patents.su/2-699488-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Блок разборки-сборки кокилей с моделями кантовки кокилей и изменения направления движения моделей линии литья в облицованные кокили со скользящей оснасткой

Номер патента: 607648
Опубликовано: 25.05.1978
Авторы: Каганэ, Рывкис, Смирнов, Теплинский, Юрченко, Яровинский
МПК: B22D 15/04
Метки: блок, движения, изменения, кантовки, кокилей, кокили, линии, литья, моделей, моделями, направления, облицованные, оснасткой, разборки-сборки, скользящей
....щегося в поднятом положении. При этом ры.ч аги 7 кантователя 3 входят в зазор между верхним и нижним фланцами кокиля, а захваты5 подъемного стола 1 устанавливаются надвнутренней поверхйостью нижнего фланца под.модельной плиты. Стол 1 опускается. При этом 5происходит протяжка модели, а кокиль остается в рычагах кантователя. В нижнем положении стола 1 подмодельная плита передаетсяна ролики поперечного рольганга 4. В этовремя кантователь 3 кантует кокиль на 1801 рабочей частью вверх) и одновременно передает его на другой рольганг, на другой уро.вень,Рычаги 7 раздвигаются цилиндром 8 и затем поворачиваются, На этом операции по.разборке кокиля с моделью заканчиваются. 15При сборке кокиля с моделью подъемныйстол 2 должен находиться в исходном...
Устройство для автоматической смены инструментальных блоков роторно-конвейерных линий

Номер патента: 1103987
Опубликовано: 23.07.1984
Авторы: Васенин, Волков, Зиновьев, Золотухин, Клусов, Кутепов, Спиридонов
МПК: B23Q 3/155
Метки: автоматической, блоков, инструментальных, линий, роторно-конвейерных, смены
...и вставки инструментальных блоков выполнен в видезвездочки-досылателя, установленнойс возможностью шагового перемещения,и огибающего барабан неподвижногокулачка с Г-образным пазом,40равным по высоте инструментальномублоку, при этом вход 1 -образногопаза расположен на уровне кассеты сналаженными инструментальными блоками, а выход - на уровне инструмен 45тальной цепи, причем звездочка-досылатель установлена на выходе кассеты с налаженными инструментальнымиблоками, а шаг между ее зубьямиравен диаметру инструментальногоблока.При этом механизм шагового перемещения звездочки-досылателя выполнен в виде электромагнита и храпового,.механизма, закрепленного на оси звез дочки-досылателя.На фиг. 1 изображено устройстводля автоматической смены...
Способ работы паротурбинного блока в резерве1известен способ работы паротурбинного блока в резерве путем поддержа1ния режима горения в котле и скорости вращения ротора турбины. однако. при таком -способе скорос

Номер патента: 381798
Опубликовано: 01.01.1973
Авторы: Достаточном, Линии, Питани, Питательную, Предлагаемый, Пример, Скорости, Что
МПК: F01D 25/10, F22B 35/04
Метки: блока, вращения, горения, котле, однако, паротурбинного, поддержа1ния, путем, работы, режима, резерве, резерве1известен, ротора, скорос, скорости, способе, таком, турбины
...у от насосов например, по редмет изобретен блока в орения в турбины, вышения опзводином для а турбим,что,с ономичосы блосов друАвторыизобретения А. Г. Корниенко, В. В Известен способ работы паротурбинного блока в резерве путем поддержания режима горения в котле и скорости вращения ротора турбины. Однако,при таком способе скорость вращения поддерживают на уровне холостого хода, что требует большого расхода топлива.Предлагаемый способ отличается от известного тем, что поддеркивают паропроизводительность котла на уровне, достаточном для обеспечения скорости вращения ротора турбины ниже первой критической.Такой способ позволяет повысить экономи - ность.Для дополнительного повышения экономичности останавливают питательные насосы блока, а...
Устройство блокировки занятости блок-участка электрифицированных линий

Номер патента: 429998
Опубликовано: 30.05.1974
Авторы: Бушкин, Институт, Шелепов, Шойхет
МПК: B61L 3/08
Метки: блок-участка, блокировки, занятости, линий, электрифицированных
...маршрутов на блок-участке (например, аппаратуры АСБ) ко входу 30 которого подключен датчик 5 запроса, установленный перед изолированной секцией.В исходном состоянии аппаратура 4 разделки маршрута выдает запретный сигнал и изолированная секция троллеи 1 обесточена. При прохождении состава мимо датчика 5 от последнего поступает сигнал на вход аппаратуры 4 разделки маршрутов, с выхода которой на вход управляемого выключателя выдается сигнал, соответствующий состоянию запрашиваемого блок-участка,Если по какой-либо причине электровоз въезжает на участок пути с обесточенной секцией троллеи 1, срабатывает устройство сигнализации и управления торможением, расположенное на электровозе, которое зажимает тормозные колодки и подает сигнал отсутствия...
Устройство блокировки занятости блок-участков электрифицированных линий

Номер патента: 653160
Опубликовано: 25.03.1979
Авторы: Кордаков, Лакота, Пантелеев, Рышкова
МПК: B61L 3/08
Метки: блок-участков, блокировки, занятости, линий, электрифицированных
...12, 13.маршрутов, который переходит в состояние включено", срабатывает выключатель 7 и секция 3 подключается к обшей сети электроснабжения 4,5Если по какой-либо причине электровоз выезжает на обесточенную изолированную секцию, он автоматически затормаживаежя на данной секции до момента подачи на нее, питания.в 35. СтарщовгалошКорректор чнк Составитель ехред И, А Редактор Н. Козлова/14Тираж 589 Под Ш 1 ИИПИ Государственного комитета по делам изобретений и открытий 113035, Москва, Ж 35, Раушская на. " ф ф 1 Ф мГВФ 4 фэ, Еьт,.,-с Зф 653160 ф, .+эЧ юф, Г /Первый вход, например блока 9, соединен с путевым датчиком 12 данной секции 2, а второй - с путевым датчиком последующей секции 1. Путевые датчики устанавливаются в начале каждой...
Предыдущий патент: Способ измерения длительности переходных процессов в системах управления электронными пучками электроннолучевых трубок
Следующий патент: Устройство для управления реверсивным электроприводом
Случайный патент: Распорно-стягивающее устройство для стыкования на плаву частей корпуса строящегося плавсредства