Вптбсозд
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
Союз Советских Социалистических РеспубликЗависимое от авт, свидетельстваЗаявлено 01.11.1972 ( 1743863(18-24) с присоединением заявки05 Ь 19(18 осударственныи комитетСовета Министров СССРпо делам изобретенийи открытий Приорит УДК 621.9.503.55(088.8)47 ликовано 1 О.Х 11.1973. Бюллете Дата опубликования описан 974 вторыобретения В. Я. Борисов, П. С. Иванов, В. П. Росляков, Н. Н, ШляхетскВ. Г, Зубаков и П. П, Найдюк нинградский электромеханический аявитель КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДАС д ступл 8 след ка ра ловойшифрнии си ящего ссогла фаз уп форме ора рассогласования 4 нала с датчика обрати лектропривода снимает вания, пропорциональ авляющего сигнала пут Сигнал рассогласовапи при поой связи я ошибая рази в чист в чисИзобретение относится к автоматическому управлению и предназначено для использования в системах управления, содержащих следящие приводы.Известны корректирующие устройства для следящего электропривода, содержащие последовательно соединенные преобразователь, фазовый дискриминатор и сумматор управляющих воздействий, датчик обратной связи, выход которого подключен к соответствующе му входу фазового дискриминатора, и генератор тактовых импульсов, соединенный с преобразователем и датчиком обратной связи.Однако известные устройства имеют недостаточную точность работы.1Целью изобретения является повышение точности работы. Для этого устройство содержит последовательно соединенные дешифратор рассогласо вания, регистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования соединен с преобразователем, а другой - с выходом датчика обратной связи, выход преобразователя 2 соединен с дополнительным входом сумматора сигнала компенсации, гыход которого подключен к соответствующему входу сумматора управляющих воздействий,Изобретение пояснено чертежом.3 На чертеже приведена функциональная блок-схема устройства,Корректирующее устройство для следящего электропривода содержит синхронизатор программы 1, делитель частоты сигнала пути 2, фазовый дискриминатор 3, дешифратор рассогласования 4, регистр памяти ошибки 5, сумматор сигнала компенсации скоростной ошибки 6, сумматор управляющих воздействий 7, датчик обратной связи 8, генератор тактовых импульсов 9 и делитель частоты импульсов 10,Устройство работает следующим образом, Система управления принимает управляющие сигналы (в унитарном коде) в виде импульсов определенной частоты следования: фазовый дискриминатор 3 сравнивает их с сигналами датчика обратной связи 8, выполненного, например, в виде фазо-импульсного датчика, и вырабатывает управляющие широтно- модулированные импульсные сигналы перемещения, пропорциональные рассогласованию, которые подаются на сумматор управляющего воздействия 7.Корректирующее устройство для следящегоэлектропривода, содержащее последовательно соедипе,пые преобразователь, фазовый дискриминатор н сумматор управляющих воздействий, датчик обратной связи, выход которого подключен к соответствующему входу фазового дискриминатора, и генератор тактовых 10 импульсов, соединенный с преобразователеми датчиком обратной связи, отличающеес я тем, что, с целью повышения точности работы, устройство содержит последовательно соединенные дешифратор рассогласования, ре гистр памяти ошибки и сумматор сигнала компенсации, причем один вход дешифратора рассогласования соединен с преобразователем, а другой - с выходом датчика обратной связи, выход преобразователя соединен с дополни тельным входом сумматора сигнала компенсации, выход которого подключен к соответствующему входу сумматора управляющих воздействий. Составитель В. КазЗиньковский Техрсд А. Камыши12 Изд,28ЦНИИПИ Государственного комитетапо делам изобретенийМосква, Ж, Раушская ко Добровольская Редактор Заказ О кова Коррек Тираж 80Совета Миноткрытийнаб., д. 4/5 Подписнотров СССР Типография, пр. Сапунова, д. ловой форме поступает на регистр памяти ошибки 5, В регистре памяти ошибки 5 устанавливается величина точности слежения. Регистр памяти 5 управляет шириной импульсов, частота которъх пропорцОпа,1 ы 1 а ско рости слежения. Таким образом осуществляется выработка дополнительного сигнала компенсации скоростной коррекции. С регистра памяти ошибки 5 сигнал в числовой форме подается па сумматор сигнала компенсации скоростной ошибки 6, куда одновременно подаются синхронизированные тактовыми импульсрми в синхронизаторесигналы в виде унйтарног последовательности импульсов. Одновременно в сумматор 6 поступают сигналы направления движения. Выработанный сумматором 6 сигнал компенсации скоростной ошибки рассогласования имеет зависимость от частоты унитарного кода и динамической ошибки следящего электропривода. Предмет изобретения
СмотретьЗаявка
1743863
Ленинградский электромеханический завод
В. Я. Борисов, П. С. Иванов, В. П. Росл ков, Н. Н. хетский, В. Г. Зубаков, П. П. Найдюк
МПК / Метки
МПК: G05B 19/37, G05B 19/416
Метки: вптбсозд
Опубликовано: 01.01.1973
Код ссылки
<a href="https://patents.su/2-408278-vptbsozd.html" target="_blank" rel="follow" title="База патентов СССР">Вптбсозд</a>
Устройство для формирования сигнала управления с оптимальными коэффициентами обратной связи

Номер патента: 1242913
Опубликовано: 07.07.1986
Автор: Пешков
МПК: G05B 17/00
Метки: коэффициентами, обратной, оптимальными, связи, сигнала, формирования
...т.е. чтобы312429нирующему полюсу разомкнутого объек"та из условияГлГ" лфЕсли система в момент времени С находится в состоянии х(й), то через отрезок времени Т, т.е. в момент времени й+Т, система (1) переходит в состояние, при условии ц(Т ) =сопвй,10 ЬГй,. й+Т): 13 4в котором с помощью параметра Т, а также с помощью матриц У и К, осуществляется оперативное изменение качества управления при изменении режимов работы объекта.Формирование матрицы У (й) реализуется с помощью блока интеграторов 1 и блоков 2 и 8, которые осуществляют решение матричного дифференциального уравнениях(С+Т) -с(Т) х(Е)+Н(Т) ОО,),ЮГЕ, с+Т),(4) где ф (Т)-ехр(А ), Н(Т)дехр(А)ВЙ=Г 1 ехр(АЦЙ,) В. (5) Юоо В случае, когда рассматриваемая мера отклонения Я(+Т)минимальна,...
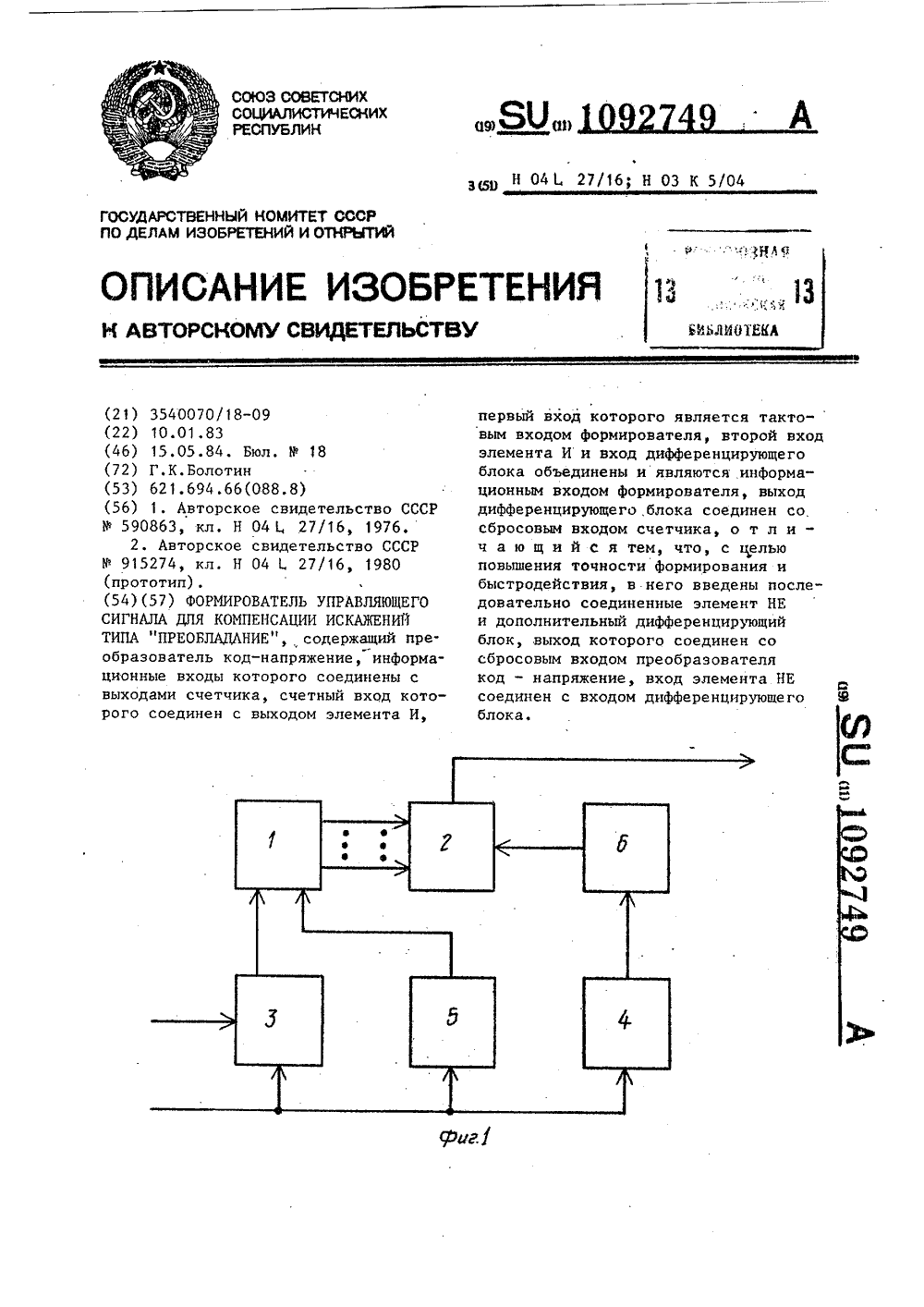
Формирователь управляющего сигнала для компенсации искажений типа “преобладание
Номер патента: 1092749
Опубликовано: 15.05.1984
Автор: Болотин
МПК: H04L 27/16
Метки: искажений, компенсации, преобладание, сигнала, типа, управляющего, формирователь
...погрешности формирования корректирующего воздействия(а следовательно, и выше точностькомпенсации искажений), так как вэтом случае однозначно уменьшаетсяи элементарная минимально возможнаявеличина приращения (т.е, шаг дискритизации выходного напряжения или,другими словами, "высота ступеньки",преобразователя код-напряжение)уровня корректирующего напряжения.На информационный вход поступаютъимпульсы, длительностькоторыххарактеризует величину имеющегосяпреобладанияпринимаемых элементовсообщения,В момент смены на информационном входе уровня напряжения логического нуля на уровень напряжения логической единицы (Фиг. 2 а) на выходе дифференцирующего блока 5 (фиг. 2 ъ) Формируется короткий импульс, сбрасывающий показания (заряд) счетчика...
Формирователь управляющего сигнала для компенсации искажений типа “преобладание

Номер патента: 1676109
Опубликовано: 07.09.1991
Авторы: Иванов, Кишенский, Крекер, Решетников
МПК: H03K 5/04, H04L 27/16
Метки: искажений, компенсации, преобладание, сигнала, типа, управляющего, формирователь
...т 0 принимается решение о приходе двух смежных положительных посылок, и т,д; В общем случае при длительности принятого сигнала в интервале от(1-0,5) т 0 до(+ 0,5) т 0, где = 1,2,. принимается решение о, поступлении на информационный вход 1-кратной смежной положительной посылки,Если длительность принимаемого положительного сигнала меньше г, то при поступлении на информационный вход от 167610945 рицательного фронта с выхода дифференцирующего блока 10 сигнал поступает на один вход элемента ИЛИ 3 и с его выхода далее на счетный вход счетчика 5, который переходит в состояние "1" (единица в младшем разряде). Этот же импульс с некоторой задержкой, пройдя через блок 8, передним фронтом сбрасывает число, хранящееся в памяти преобразователя 7, а...
Устройство для питания гальванических ванн периодическим током с обратным импульсом

Номер патента: 706469
Опубликовано: 30.12.1979
Авторы: Кривцов, Лукомский, Разумов
МПК: C25D 21/12
Метки: ванн, гальванических, импульсом, обратным, периодическим, питания, током
...- скатодом 12 ванны, Третья фаза вторичной обмотки трансформатора 13 нагру-,жена однофазным антотрансформатором 14, скользящий контакт которого через резистор 4 соединен с анодом выпрямительного элемента 3 и тиристора 15. Автотрансформатор и выпрямительйый элемент З,образуют бднофаэныйоднополупериодный выпрямитель, отри-фцательный полюс которого подключенк катоду 12 гальванической ванны,Катод тиристора 15 через конденсатор16 соединен с анодом 10 гальванической йанны и с неподвижным контактомобмотки антотрансформатора, Тиристор15 зашунтиронан.встречно включеннымдиодом 17, Первичные обмотки 18, 1920 трехфазного трансформатора под"ключенык выходным .клеммам регулятора 21 напряжения трехфазного тока,чавходные клеммы регулятора подается...
Устройство для регенерации цифрового сигнала и компенсации межсимвольных искажений

Номер патента: 1508352
Опубликовано: 15.09.1989
МПК: H03M 13/25
Метки: искажений, компенсации, межсимвольных, регенерации, сигнала, цифрового
...решающего ЗО вого этапа одновременной коррекцииблока 4 и группы 6, задержанные в и регенерации в. матрице 12 в группу 8группе 11 на число тактов, равное чис- корректора с йрямыми связями по решелу компенсируемых отсчетов преддейст- нию поступают сигналы с повышеннойвия. На другие входы матрицы 13 по- верностью, и второй этап коррекцииступают в цифровом виде с выхода про- и регенерации посредством матрицы 13граммируемой логической матрицы 1235осуществляется более качественно.сигнвлы о значениях регенерированных Выходные сигналы с выхода матрипредшествующих сигналах и с выходов цы 14 последнего блока 1.И компенсаэлементов 9 группы 10 - о значениях ции поступают в выходной усилитель 5,регенерированных последующих сигна 40который...
Предыдущий патент: Позиционная система программного управления станком
Следующий патент: Датчик обратной связи для устройств управления с шаговыми двигателями
Случайный патент: Способ установки буксируемого подводного аппарата для слежения за разноглубинным тралом