Система позиционного программного управлениястанками
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 319926
Авторы: Городецкий, Ратмиров, Розинов, Экспериментальный

Текст
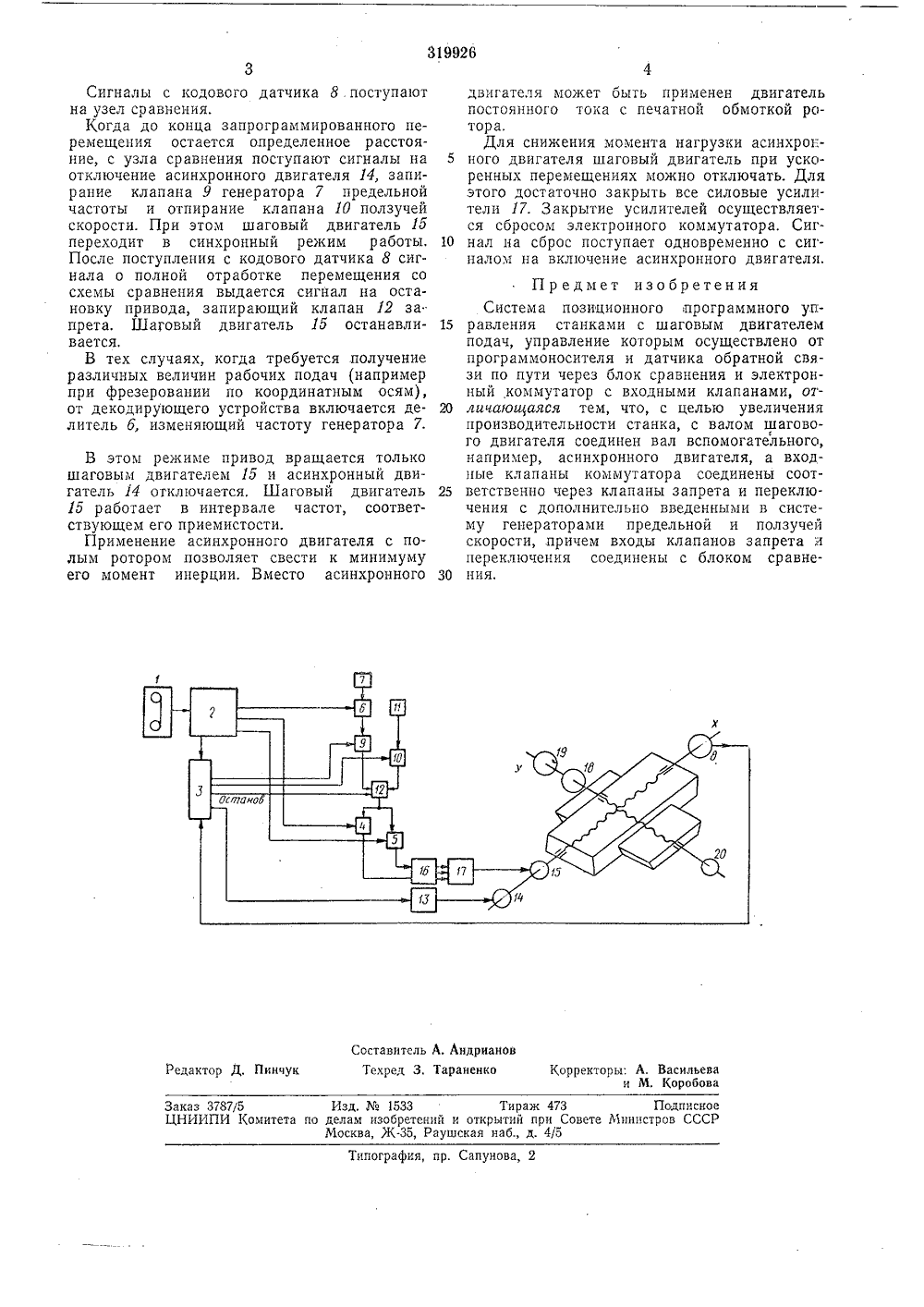
"Ж.1 ЧЕДЩбиблиотека МБА О П И С А Н И Е 39926ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических РеспубликЗависимое от авт. свидетельства Заявлено 13.Ъ,1970 ( 1436467/ 6 05 Ь 19/14 б 05 Ь 19/40 П с присоединени т заявкиомитет по дел ПриоритетОпубликовано 02,Х.1971. Бюллетень3 изобретеиий и открытпри Совете МинистраСССР УДК 62-503.55(088. ата опублик ия описания 10.1.1972 Лвторы зобретенаявитель СИСТЕМА РАВЛЕНИЯ ОГО ПРОГРАММНОГСТАНКАМИ И Известны системы позиционного программного управления станками с шаговым приводом подач, в которых шаговый привод имеет ограничение по частоте приемистости. Для увеличения диапазона скоростей приме няют плавный разгон и замедление шагового двигателя на частотах выше частоты приемистости.Введение плавного разгона и торможения приводит к усложнению, удорожанию систем 10 программного управления и снижению надежности. Это ограничивает применение шагового привода особенно в дешевых станках с устройствами позиционного управления: сверлильных, малых станках для изготовления 15 печатных плат и др.Цель системы - увеличение производительности станка,Достигается это благодаря тому, что с валом шагового двигателя соединен вал вспо могательного, например, асинхронного двигателя, а входные клапаны коммутатора соединены соответственно через клапаны запрета и переключения с дополнительно введенными в систему генераторами предельной 25 и ползучей скорости, причем входы клапанов запрета и переключения соединены с блоком сравнения.На чертежеложенной систе 0 изображена блок-схема предмы программного управления, 3 Программа задается на перфоленте. Сигналы со считывающего устройства 1 поступают в декодирующий узел 2. Выходы декодирующего узла 2 соединены с узлом д сравнения запрограммированного перемещения, с отработанными клапанами 4, 5 реверса и делителем 6 генератора 7, Другой вход узла .т сравнения соединен с кодовым датчиком 8 обратной связи по пути, Выходы узла сравнения соединены с клапанами 9, 10 переключения генераторов 7 и 11 предельной и ползучей скоростей, а также с клапаном 12 запрета и блоком 13 управления асинхронного двигателя 14, Шаговый двигатель 15 вращает ходовой винт станка. Управление шаговым двигателем 15 выполняется электронным коммутатором 16 через силовые усилители 17.Схема для другой координаты выполняется аналогично рассмотренной: ходовой винт координаты у связан с шаговым двигателем 18 этой координаты, асинхронным дви гателем 19 и кодовым датчиком 20,При записи команды на ускоренное перемещение включается асинхронный двигатель 14, открывается клапан 9, и на электронный коммутатор 16 через один из клапанов реверса поступает предельная частота,Лсинхронный двигатель 14 вращает шаговый двигатель 15 в сверхсинхронном режиме.Заказ 3787/5 Изд. Юо 1533 Тираж 473 Подписное ЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССР Москва, Ж.35, Раушская наб., д. 4/5 Типография, пр. Сапунова, 2 Сигналы с кодового датчика 8 поступают на узел сравнения.Когда до конца запрограммированного перемещения остается определенное расстояние, с узла сравнения поступают сигналы на отключение асинхронного двигателя 14, запирание клапана 9 генератора 7 предельной частоты и отпирание клапана 10 ползучей скорости. При этом шаговый двигатель 1 б переходит в синхронный режим работы, После поступления с кодового датчика 8 сигнала о полной отработке перемещения со схемы сравнения выдается сигнал на остановку привода, запирающий клапан 12 за" прета. Шаговый двигатель 15 останавливается.В тех случаях, когда требуется получение различных величин рабочих подач (например при фрезеровании по координатным осям), от декодирующего устройства включается делитель б, изменяющий частоту генератора 7. В этом режиме привод вращается только шаговым двигателем 15 и асинхронный двигатель 14 отключается, Шаговый двигатель 1 б работает в интервале частот, соответствующем его приемистости.Применение асинхронного двигателя с полым ротором позволяет свести к минимуму его момент инерции. Вместо асинхронного двигателя может быть применен двигатель постоянного тока с печатной обмоткой ротора,Для снижения момента нагрузки асинхрок ного двигателя шаговый двигатель при ускоренных перемещениях можно отключать. Для этого достаточно закрыть все силовые усилители 17. Закрытие усилителей осуществляется сбросом электронного коммутатора. Сиг нал на сброс поступает одновременно с сигналом на включение асинхронного двигателя. Предмет изобретенияСистема позиционного программного уп равления станками с шаговым двигателемподач, управление которым осуществлено от программоносителя и датчика обратной связи по пути через блок сравнения и электронный коммутатор с входными клапанами, от личающаяся тем, что, с целью увеличенияпроизводительности станка, с валом шагового двигателя соединен вал вспомогательного, например, асинхронного двигателя, а входные клапаны коммутатора соединены соот ветственно через клапаны запрета и переключения с дополнительно введенными в систему генераторами предельной и ползучей скорости, причем входы клапанов запрета и переключения соединены с блоком сравне ния.
СмотретьЗаявка
1436467
В. А. Ратмиров, А. Г. Розинов, М. С. Городецкий, Экспериментальный научно исследовательский институт металлорежущих станков
МПК / Метки
МПК: G05B 19/19, G05B 19/416
Метки: позиционного, программного, управлениястанками
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/2-319926-sistema-pozicionnogo-programmnogo-upravleniyastankami.html" target="_blank" rel="follow" title="База патентов СССР">Система позиционного программного управлениястанками</a>
Устройство управления шаговым двигателем

Номер патента: 962858
Опубликовано: 30.09.1982
Автор: Кирпатенко
МПК: G05B 19/40
Метки: двигателем, шаговым
...образом, в каком бы положении не был шаговый двигатель, он самоустановится в этом положении, .благодаря описанной положительной обратной связи.Для приведения двигателя в движение в прямом или инверсном направлении достаточно на вход А сумматора 8 подать от преобразователя 9 соответственно прямой или дополнительный двоичный код единицы. 60Таким образом, на выходе сумматора 8 появляется только соседний код по отношению к тому коду, которым ранее управлялся шаговый двигатель, что обеспечивает надежную работу щагово го двигателя при максимально возможной скорости.При поступлении на вход А сумматора 8 положительной единицы (в прямом двоичном коде) или отрицательной единицы (в дополнительном двоичном коде) указанная совокупность...
Способ контроля устойчивой отработки шага однофазным шаговым двигателем с активным ротором

Номер патента: 1683168
Опубликовано: 07.10.1991
Авторы: Власов, Кузнецова, Кулевская, Лучинина, Стискина
Метки: активным, двигателем, однофазным, отработки, ротором, устойчивой, шага, шаговым
...импульсы заданного напряжен. з и длительности, после окончания35 каждого импульса проводят в заданном временном интервале поиск экстремума кривой тока, наведенного в обмотке двигателя,при обнаружении экстремума регистрируютустойчивую отработку шага, причем конт 40 роль двигателя производят при подаче импульсов номинальной длительности ипониженного напряжения относительно номинального значения при фиксированнойнагрузке на валу, а поиск экстремума кри 45 вой тока проводят после первого прохождения тока через нулевое значение.При грубых отклонениях от заданнойгеометрии двигателя может оказаться, тосоотношение фиксирующего и электромаг 50 нитного моментов ниже расчетного значения, При этом двигатель обладаетизбыточной энергией,...
Способ управления шаговым двигателем перемещения запорно регулирующих элементов гидравлической, пневматической и смазочной аппаратуры и устройство для его осуществления

Номер патента: 1753063
Опубликовано: 07.08.1992
Авторы: Иванов, Левин, Левит, Лыткин, Орлик, Свешников
МПК: F15B 9/03
Метки: аппаратуры, гидравлической, двигателем, запорно, перемещения, пневматической, регулирующих, смазочной, шаговым, элементов
...5, Система 1 управления выполнена в виде программируемого контроллера 6, силовые выходы 7 которого через токозадающие резисторы 8 непосредственно связаны с фазовыми обмотками 4 шагаоага двигателя 3 (возможно управление несколькими шаговьми двигателями). Кинематическая связь (поэицией,не обозначена) шагового двигателя 3 и заг арно-регулирующего элемента 5 клапана может дополнительно содержать пружину 9 (фиг. 3) связл с запорно-регулирующим элементом.На фиг, 1 и 2 ц качестве аппаратуры 2 показан гидравлический регулятор расхода, в корпусе 10 и переходнике 11 которого размещены гильза 12 с редукцианным клапаном 13, нагруженным пружиной 14, и гильза 15 с эапарно-регулирующим элементом 5, на который снизу воздействует пружина 16, а сверху -...
Устройство для косвенного контроля неравномерности воздушного зазора асинхронного двигателя

Номер патента: 1275337
Опубликовано: 07.12.1986
Авторы: Баранов, Новиков, Рогозин, Рындин
МПК: G01R 31/34
Метки: асинхронного, воздушного, двигателя, зазора, косвенного, неравномерности
...счетчика 23, в соответствии с временной диаграммой (фиг.4). 50 Генератор 16 включает мультивибратор на 1 кГц, выполненный на микросхемах ДД 1 и ДЦ 2 (фиг.З), и делитель частоты 1/1000, выполненный на 55 микросхемах ДДЗ-ДД 5. Выход мультивибратора связан с входом делителя и входом 24 для обнуления сумматора 8. Выход пелителя соединен с хдлм логической схем И 17.Устройство ра бота ет елсдук 1 щ 1 и образом.В исходном положении тумб;1 ер 36 находится в положении 37, при этом вход К триггера 12 пуска закорочен на массу и триггер 12 пуска находится в нулевом состоянии, характеризуемом высоким уровнем напряжения на инверсном выходе 29, подключенном к входу 30 сброса счетчика 23, вызывая сброс в исходное состояние. Прямой выход 13 триггера...
Устройство для автоматического резервирования источника питания трехфазного асинхронного двигателя

Номер патента: 866651
Опубликовано: 23.09.1981
Авторы: Бохан, Гутько, Синяков, Фурсенко
МПК: H02J 9/06
Метки: асинхронного, двигателя, источника, питания, резервирования, трехфазного
...источника питания, а вторые 1 выводы этих катушек присоединены к фазам сети, вторые выводы первых размыкаю" щих контактов контакторов присоединены к средней точке звезды.статорных обмоток двигателя, Вторые раэмыкающие контакты 11, 16 и 19 каждого контактора подключены параллельно замыкающему контакту 3 трехфазного реле 2 напряжения, второй замыкающийконтакт 12 контактора с катушкой б первым выводом присоединен к фазе сети, к которой. присоединена и катушка б этого контактора, а третий размыкающий контакт 13 этого контактора первым выводом присоединен к Фазе В сети, при этом вторые выводы контактов 12 и 13 присоединены к первому выводу замыкающего контакта 3 трехфазного реле 2 напряжения.Катушка 4 магнитного пускателя первым выводом...
Предыдущий патент: Инструментальный магазин
Следующий патент: Многоканальный астатический регулятор
Случайный патент: Способ бездребезговой коммутации нагрузки герконовым реле