Сервопривод кулачкового вала гидравлического пресса
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1570931
Автор: Швецов


Текст
(51)5 В 30 В 15/20 ьныи инсти идравличесаука, 1966,КОВОГО ВАЕССА машиностроециям систем ванием. Цель зводительносГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯПРИ ГКНТ СССР ПИСАНИЕ ИЗОБРЕ ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) СЕРВОПРИВОД КУЛАЧЛА ГИДРАВЛИЧЕСКОГО ПР(57) Изобретение относится книю, в частности к конструкуправления прессовым оборудоизобретения - повышение прои ти ковки за счет повышения быстродействия сервопривода. Сервопривод содержит последовательно соединенные сумматор 1, усилитель мощности 2, электромеханический преобразователь 3, гидроусилитель 4, силовой гидроцилиндр 5, связанный с кулачковым валом. За счет введения дополнительного сумматора, в котором производится суммирование сигнала с датчика давления 9 в полости силового гидроцилиндра и сигнала, пропорционального инерционной составляющей подвижных частей сервопривода, производится изменение скорости перемещения штЬка силового гидро- цилиндра вне зависимости от позиционной нагрузки. 1 ил.1570931 формула изобретения Составитель В. Родимов Редактор М. Бандура Техред А. Кравчук Корректор С. Черни Заказ 1480 Тираж 512 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж - 35, Раушская набд, 4/5 Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,01Изобретение относится к машиностроению в частности к конструкции систем управления прессовым оборудованием.Целью изобретения является повышение производительности ковки за счет увеличения быстродействия сервопривода.На чертеже представлена структурная схема сервопривода кулачкового вала гидравлического пресса.Сервопривод содержит последовательно соединенные сумматор 1, усилитель 2 мощ ности, электромеханический преобразователь 3, гидроусилитель 4, силовой гидроцилиндр 5, связанный с кулачковым валом, который соединен через датчик 6 положения с первым входом сумматора 1, дифференцирующее устройство 7, дополнительный сумматор 8 и датчик 9 давления. При этом дополнительный сумматор 8 соединен первым входом с выходом дифференцирующего устройства 7, связанного своим входом с выходом датчика 6 поло жения, другим входом - с выходом датчика 9 давления, соединенного с полостями силового гидроцилиндра 5, а выходом - с вторым входом сумматора 1.Сервопривод работает следующим образом.25Сигнал рассогласования, пропорциональный углу поворота кулачкового вала, поступает на третий вход сумматора 1, суммируется с сигналами, пришедшими с выходов датчика 6 положения и дополнительного сумматора 8, усиливается усилителем 2 мощности и поступает на вход электромеханического преобразователя 3 воздействующего на входной шток гидро- усилителя 4, подающего рабочую жидкость в полость силового гидроцилиндра 5. Последний поворачивает кулачковый вал в заданное положение. При этом дополнительный сумматор 8 из сигнала, пропорционального перепаду давлений, поступающему с выхода датчика 9 давления, вычитает сигнал, пропорциональный инерцион ной составляющей (ускорению) подвижных частей сервопривода, определяющий погрешность в цепи коррекции по перепаду давлений, поступающий с выхода дифференцирующего устройства 7, т, е. увеличение позиционной нагрузки на выходном штоке силового гидроцилиндра 5, приводящее к уменьшению скорости перемецения его штока, приведет к увеличе. нию перепада давлений в его полостях и увеличению сигнала на выходе датчика 9 давления. При этом сигнал на выходе датчика 9 давления определяется позиционной нагрузкой на штоке силового гидроцилиндра 5 и инерционной составляющей подвижных частей сервопривода, причем последняя составляющая приводит к погрешности при осуществлении коррекции по позиционной нагрузке на штоке силового гидроцилиндра 5. Дополнительный сумматор 8 вычитает из сигнала, поступающего с выхода датчика 9 давления, сигнал, пропорциональный инерционной составляющей сервопривода. Полученный сигнал поступает с выхода дополнительного сумматора 8 на второй вход сумматора 1, что приводит к дополнительному открытию гидроусилителя 4 и поддержанию скорОсти перемещения штока силового гидро- цилиндра 5 вне зависимости от величины позиционной нагрузки. При достижении валом заданного положения позиционирования по команде датчика 6 положения сигнал на выходе сумматора 1 станет равен нулю и силовой гидроцилиндр 5 остановит кулачковый вал в заданном положении. Сервопривод кулачкового вала гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, связанный с кулачковым валом, который соединен с датчиком положения, подключенным к одному. из входов сумматора, отличающийся тем, что, с целью повышения производительности ковки за счет увеличения быстродействия, сервопривод снабжен дифференцирующим устройством, дополнительным сумматором и датчиком давления, соединенным с полостями силового гидроцилиндра, причем первый вход дополнительного сумматора связан через дифференцирующее устройство с выходом датчика положения, второй вход дополнительного сумматора соединен с выходом датчика давления, а вьход - с другим входом сумматора.
СмотретьЗаявка
4431777, 30.05.1988
КРАМАТОРСКИЙ ИНДУСТРИАЛЬНЫЙ ИНСТИТУТ
ШВЕЦОВ ЮРИЙ АНАТОЛЬЕВИЧ
МПК / Метки
МПК: B30B 15/20
Метки: вала, гидравлического, кулачкового, пресса, сервопривод
Опубликовано: 15.06.1990
Код ссылки
<a href="https://patents.su/2-1570931-servoprivod-kulachkovogo-vala-gidravlicheskogo-pressa.html" target="_blank" rel="follow" title="База патентов СССР">Сервопривод кулачкового вала гидравлического пресса</a>
Датчик разности давлений

Номер патента: 1760418
Опубликовано: 07.09.1992
Авторы: Иванов, Иванова, Микулич, Сафоненко
МПК: G01L 13/02, G01L 9/10
Метки: давлений, датчик, разности
...в виде воронок 4, преобразователь 5 перемещения (сердечник и индуктивная катушка). Перегородка состоит из сердечника 6, на котором крепятся магнитные шайбы 7. диэлектрические прокладки-шайбы 8 и конус 9. Ферромагнитная жидкость располагается на вершинах магнитных шайб 7 и в свободном пространстве между шайбами 8,5 10 20 25 30 35 40 45 Датчик собирается по следующей схеме, Шайбы 7 из магнитного материала намагничены, собираются с прокладками из диэлектрического материала меньшего диаметра на магнитопроводном стержне, заканчивающемся конусными выступами, и вставляются в немагнитный корпус с зазором в 0,01 мм, свободное пространство заполняется ферромагнитной жидкостью. Так как рядом стоят магнитные шайбы, то между ними замыкаются...
Датчик разности давлений

Номер патента: 972284
Опубликовано: 07.11.1982
Авторы: Билейчук, Вощинский, Турчанинов, Фролов
МПК: G01L 13/02
Метки: давлений, датчик, разности
...элемент в виде двух мембран".ых коробок 1, которые закреплены па перегородке 2 и связаны с сердечником 3 дифференциально-трансформаторного преобразователя 4. Перегородка 2 зажата между крышками 5 и 6 корпуса и образует две рабочие камеры. В перегородке 2 соответственно для каждой импульсной линии 7, позволяющей давление среды в рабочие камеры, размещен вентиль, выполненный в виде запорной иглы 8, вдоль оси которой установлена с возможностью независимого перемещения вторая запорная игла 9, образуюшая клапан для удаления воздуха из рабочих камер. В каждой игле выполнен осевой канал, имеющий выход на наружном торце и на боковой поверхности, благодаря чему рабочие камеры с импульсными линиями 7 могут сообщаться с атмосферой,...
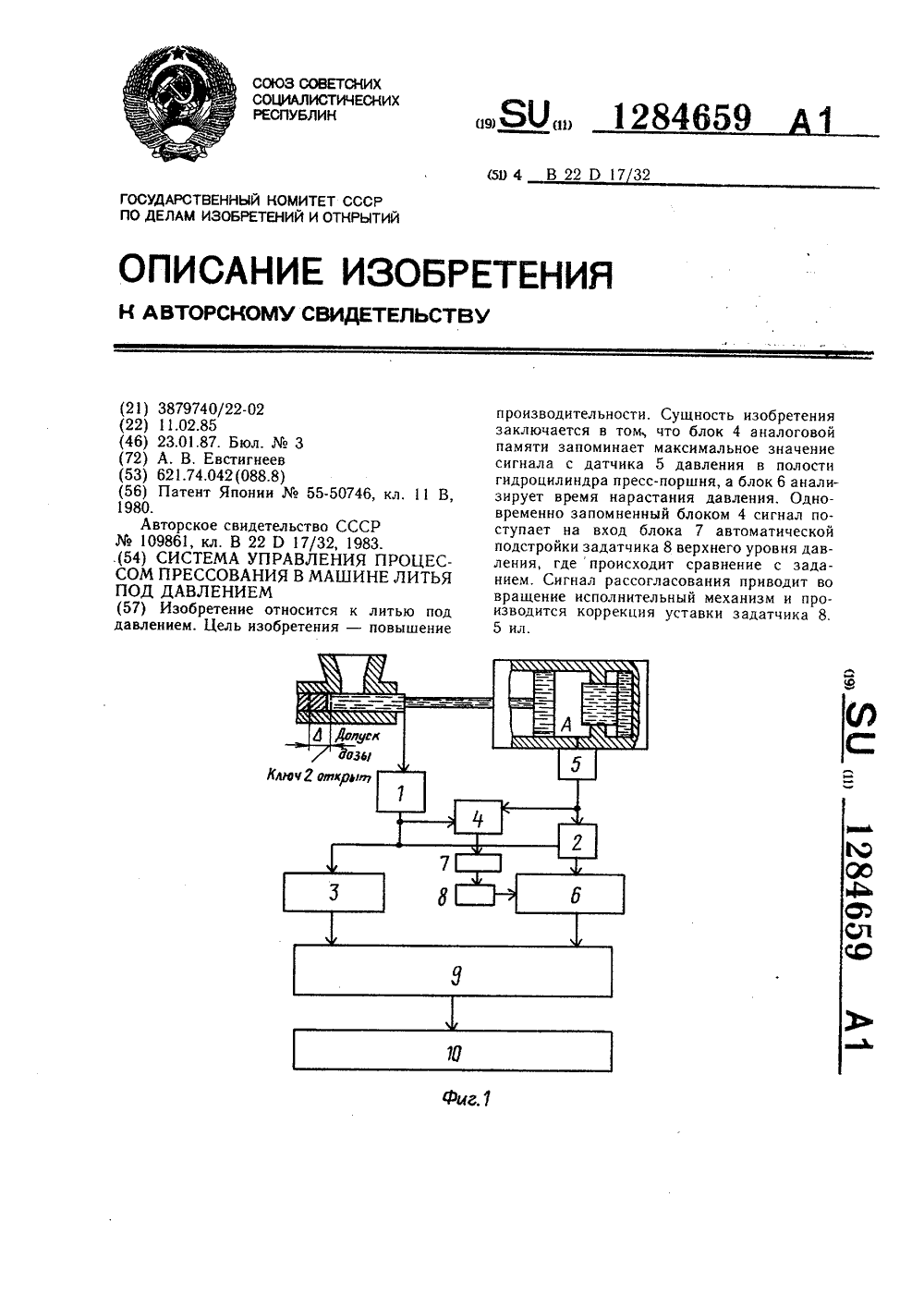
Система управления процессом прессования в машине литья под давлением
Номер патента: 1284659
Опубликовано: 23.01.1987
Автор: Евстигнеев
МПК: B22D 17/32
Метки: давлением, литья, машине, прессования, процессом
...как при отходе пресс-поршня в исходное положение ключ 21 закрывается, и только после нажатия оператором кнопки Пуск 22 нового цикла прессования конденсатор С разряжается на землю. Таким образом схема подготавливается к новому циклу запоминания,Блок 6 контроля времени (фиг. 4) работает следующим образом,Сигнал от датчика 5 давления через открытый ключ 2 подается на усилительный элемент 23, выход которого соединен с входами блоков 24 и 25, которые представляют собой схемы триггера Шмитта, на другие входы которых подаются сигналы с задатчика 26 нижнего уровня давления и задатчика верхнего уровня давления - блок 8.Блоки 24 и 25 настроены так, что при превышении давлением порога срабатывания, заданного задатчиком 26, счетные импульсы...
Электрогидравлический следящий привод

Номер патента: 848773
Опубликовано: 23.07.1981
МПК: F15B 9/03
Метки: привод, следящий, электрогидравлический
...О ля 3, датчик 8 перепада давлений,блок.9 деления, датчик 10,скорости,блок 11 умножения, интегратор 12,дополнительный суммахор 13, объект14 регулирования, усилитель 15 и дат чик момента (не показан), подключенный к вычитающему входу дополнительного сумматора 13.Электрогидравлический0 привод работает следующим84 8773 Формула изсбретения ИИПИ Заказ 6044/41 Тираж 749 Подписно ППП Патент , г, Ужгород, ул, Проектная,л Сигнал рассогласования от сумма-, тора б через блок 11 умножения и усилитель 15 поступает на привод регулирующего органа 2. и управляет работой насоса 1, который через гидродвигатель 3 воздействует на объект 14 регулирования, .Уменьшая рассогласование, при этом на второй вход блока 11 умножения поступает сигнал оценки ),...
Электрогидравлический вибростенд

Номер патента: 1231291
Опубликовано: 15.05.1986
Авторы: Гололобов, Данилейко, Староверов
МПК: F15B 19/00, F15B 21/12
Метки: вибростенд, электрогидравлический
...цепь обратной связи поположению гидроцилиндра 2, включающую 20сравнивающее устройство 8, отрица"тельный вход которого соединен с датчиком 9 положения гидроцилиндра 2,положительный вход через инвертор 10 -с генератором 1, а выход - с усилите 25лем 3, цепь динамической обратнойсвязи, выполненную в виде датчика 11перепада давления в полостях 5 и 6,подключенного к отрицательному входусравнивающего устройства 12, положи- З 0тельный вход которого соединен с генератором 1, а выход - с усилителем4, а также блок 13 регулирования давления источника 7 с измерителем 14разности давления на входе и выходе 35источника 7, задатчиком, выполненнымв виде источника 15 регулируемого напряжения, сравнивающим устройством 16и дросселирующим элементом,...
Предыдущий патент: Агрегат для раскроя и стыковки полосового материала
Следующий патент: Способ получения рельефных оттисков на термопластичной пленке
Случайный патент: Устройство для активации пульпы