Цифровая система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1357917
Авторы: Найденов, Овод-Марчук, Филиппович



Текст
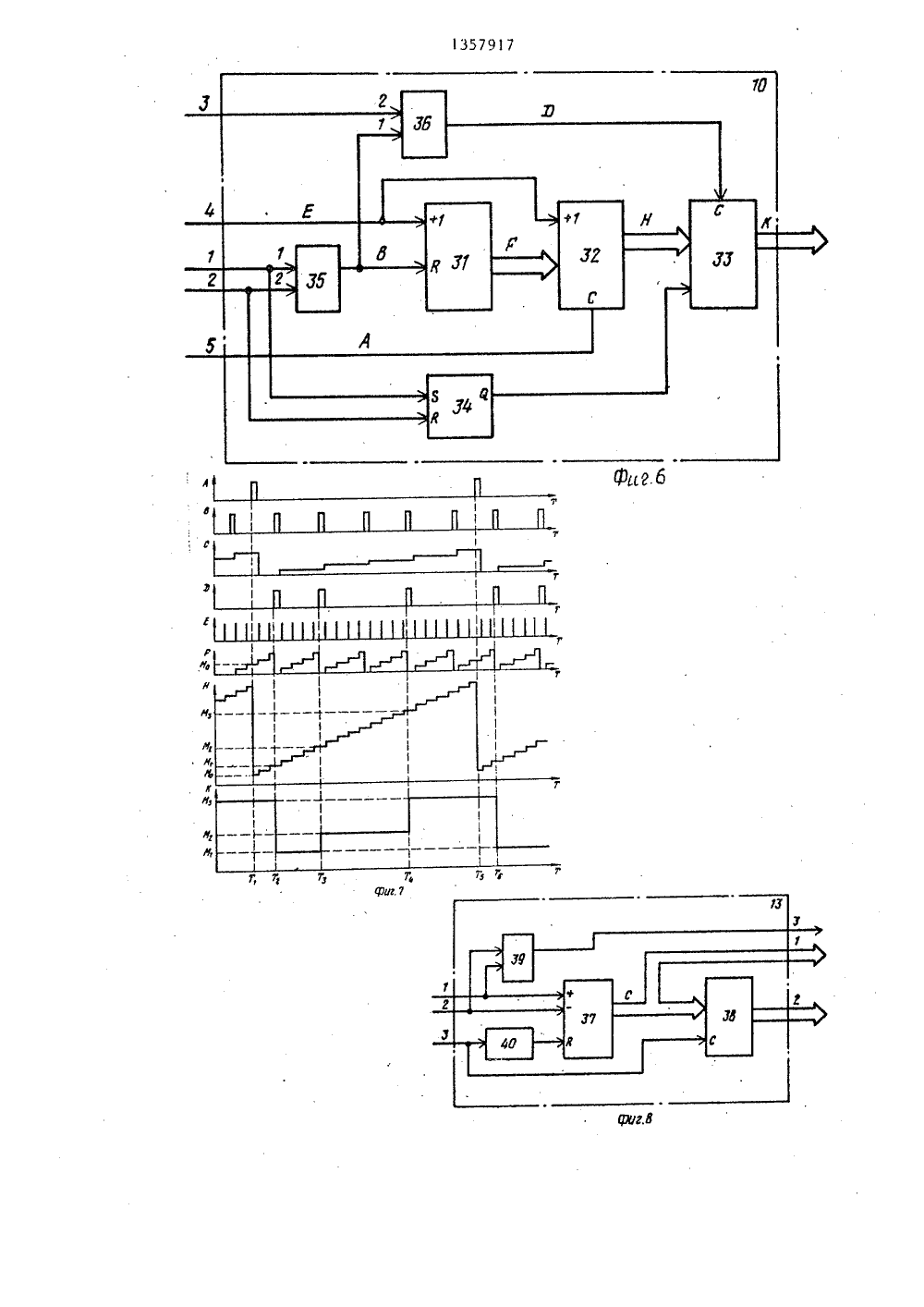
9/18 1)4 О ЫЙ НОМИТЕТ СССРРЕТЕНИЙ И ОТНРЫТИЙ ГОСУДАРСТВ ПО ДЕЛАМ И тоею,ОПИСАНИЕ ИЗОБРЕТЕ А ВТОРСНОМУ СВИДЕТЕЛЬСТВУ(54) ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ (57) Изобретение относится к цифровым системам управления и может быть использовано в системах управления промьппленными роботами, станками и другими механизмами. Цель изобретения повышение точности цифровой системы управления, надежности ее работы, Цифровая система управления содержит задатчик 1, первый 2 и второй 3 регулирующие блоки, блок 4 коммутации,1 ВБОи, 1 3579 1 7 ключей, усилитель 5 мощности, исполнительный двигатель б, инкрементальный датчик 7, формирователь 8 импульсов, блок 9 синхронизации, преобразователь 10 частота - код, блок 11 памяти, сдвигающий блок 12, датчик 13 приращения позиции и дешифратор 14. Цель изобретения обеспечивается за счет введения элементов и блоков 10-4, При этом повышение точности достигается за счет повышения точности измерения скорости и реализации законов регулирования, обеспечивающих уменьшение ошибок по положению и по скорости, Повышение надежности достигается за счет исключения сквоз ных токов в усилителе мощности и пре- И дотвращения аварийных режимов. 2 з.п. ф-лы, 17 ип,С."Л, Пилипенко венно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4 роизв Заказ 5997/48 Тираж 863 ВНИИПИ Государс по делам изоб 113035, Москва, Ж1 1359Изобретение относится к цифровымсистемам управления и может быть использовано в системах управленияпромьпдленными роботами, станками и5другими механизмами,Целью изобретения является повышение точности и надежности системы,Па Фиг. 1 приведена функциональная схема цифровой системы управления на Фиг. 2 - Функциональная схема блока коммутации ключей; .наФиг. 3 - первый регулирующий блок,на Фиг4 - второй регулирующий блок;на Фиг. 5 - Функциональная схемапервого интегратора; на фиг, 6функциональная схема преобразователячастота - код; на Фиг, 7 - временныедиаграммы, поясняющие принцип измерения скорости; на фиг, Я - функциональная схема датчика приращенияпозиции; на Фиг. 9 - Функциональнаясхема первого дешифратара; на фиг, 10 Функциональная схема сдвигающегоблока; на Фиг, 11 - Функциональная 25схема формирователя импульсов; нафиг, 12 - Функциональная схема блока синхронизации; на Фиг, 13 - функциональная схема блока контроля тока;на Фиг. 14 - функциональная схема З 0преобразователя код - ширина импульссцз," на фиг, 15 - функциональная схема блока защиты ключей; на фиг,6времепные диаграммы, поясняющие принцип Формирования сигналов управленияусилителем мощности; на фиг 17Функциональная схема усилителя мошности,Цифровая система управления, 2 и второй 3 регулирующие блоки,блок 4 коммутации ключей, усилитель5 мощности, исполнительный двигатель6, инкрементальный датчик 7, Формирователь 8 импульсов, блок 9 синхронизации, преобразователь 10 частота -код, блок 11 памяти, сдвигаюшии блок12, датчик 13 приращения позиции,дешифратор 14,Блок 4 коммутации ключеи ,фиг, 2) 50содержит преобразователь 15 код -ширина импульсов, блок б защитыключей, блок 17 контроля токаПервый регулирующий блок (Фиг, 3)содержит первый регистр 18, первыйинтегратор 19, первый элемент 20сравнения, второй масштабирующий элемент 21, второй интегратор 22, первьй сумматор 23, третий масштабирую 72щий элемент 24, первый элемент 25задержки,Второй регулирующий блок 3(Фиг, 4) содержит второй элемент 26сравнения, четвертьй масштабирующийэлемент 27 и второй регистр 28,Первый интегратор 19 (фиг. 5)содержит второй сумматор 29 и третийрегистр 30,Преобразователь 10 частота - код(фиг. 8) содержит третий счетчик 37,пятьй регистр 38, второй элементИЛИ 39, второй элемент 40 задержки.Первьй дешиФратор 14 (фиг. 9) содержит мультиплексор 41 и второй элемент И 42,Сдвигающий блок 12 (Фиг, 10) содержит сдвигавый регистр 43, шестойрегистр 44, первьй блок 45 элементовИ, блок 46 элементов ИЗП 1, первыйэлемент ИЛИ-НЕ 47, третий элемент 48задержки,Формирователь 8 импульсов (фиг. 1)содержит второй 49, третий 50, четвертый 51 и пятый 52 триггеры, третий 53, четвертый 54, пятый 55 ишестой 56 элементы И блок 57 эле -ментов И-НЕ, седьмой 58 и восьмой59 элементы И, первьй 60, второй 61и третий 62 инверторы.Блок 9 синхронизации (фиг, 12)содержит генератор 63, четвертыйсчетчик 64, второй дешифратор 65,второй блок 66 элементов И, первый67 и второй 68 делители частоты,шестой триггер 69, третий блок 70элементов И,Блок 17 контроля тока (фиг, 13)содержит первый 71 и второй 72 кампаратары, третий элемент ИЛИ 73,седьмой триггер 74, четвертый элемент 75 задержки, одновибратор 76,девятьй элемент И 77, восьмой триггер 78,Преобразователь 15 код - ширинаимпульсов (фиг, 14) содержит пятый79 и шестой 80 счетчики, первый элемент И-НЕ 81, десятый элемент И 82,второй элемент ИЛИ-НЕ 83.Блок 16 защиты ключей (фиг, 15)содержит девятьй триггер 84, второй85, третий Яб и четвертый 87 элементы И-НЕ, пятый 88, шестой 89 и седьИсполнительный двигатель 6 и механически связанный с ним инкрементальЛ 13579 мой 90 элементы задержки, четвертый 9 и пятый 92 инверторы, одиннадцатый 93, двенадцатый 94 и тринадцатый 95 элементы И, пятый элемент И-НЕ 96.Усилитель 5 мощности (фиг. 17)5 содержит первый 97, второй 98, третий 99 и четвертый 100 ключи, датчик 101 тока и дифференциальный усилитель 102,Система работает следующим образом.Очередной цикл работы начинается с. появления на пятом выходе блока 9 синхронизации тактирующего сигнала, который производит в датчике 13 приращения позиции перезапись кода третьего счетчика 37 в пятый регистр 38 (фиг. 8). Величина этого кода представляет собой перемещение исполнительного двигателя 6 за предыдущий цикл работы системы. Одновременно тактирующий сигнал с седьмого выхода блока 9 синхронизации, поступая на пятый вход преобразователя 10 частота - код, переписывает код с выхо да первого счетчика 31 во второй счетчик 32 (фиг, 6), подготавливая его для измерения интервала в очередном цикле работы системы, Тактирующий сигнал, поступая с четвертого выхода блока 9 синхронизации на третий вход первого регулирующего блока 2, производит зались кода приращения позиции в первый интегратор 19 (фиг. 3), кода заданной позиции - в35 первый регистр 18, Величина этого кода представляет собой приращение кода заданной позиции за предыдущий цикл работы системы.Код ошибки по позиции с выхода . 40 первого элемента 20 сравнения накапливается во втором интеграторе 22, Его выходной код суммируется в первом сумматоре 23 с выходным кодом второго масштабирукщего элемента 21 и на выходе третьего масштабирующего элемента 24 формируется код заданной скорости. С приходом тактирующего сигнала с восьмого выхода блока 9 синхронизации на третий вход сдвигающего блока 12 (фиг, 10) на его выходе формируется код действительной скорости (КДС), который поступает на вычитающий вход второго элемента 26 сравнения второго регулирующего блока 55 3 (фиг, 4). На его суммирующий вход поступает код заданной скорости (КЗС). Код управления (КУПР) с выхода четвер. ,того масштабирующего элемента 27 пер 174вого регулирующего блока 2 записывается во второй регистр 28 второгорегулирующего блока 3 тактирующимсигналом, поступающим с третьего выхода блока 9 синхронизации,Импульс с выхода заема пятого счетчика 79 преобразователя 15 код - ширина импульсов (фиг, 15) переписываеткод управления в шестой счетчик 80.Если код управления не равен нулю,уровень сигнала на первом входе десятого элемента И 82 разрешает прохождение импульсов на вычитающий входшестого счетчика 80 до момента егообнуления, Таким образом, на второмвыходе преобразователя 15 код - ширина импульсов формируются импульсы,длительность которых пропорциональнакоду управления, этот сигнал появляется на выходе тринадцатого элемента И 95 блока 16 защиты ключей(фиг. 16), если знак кода управления(прямой выход девятого триггера 84)имеет уровень логической единицы, аесли знак кода управления имеет уровень логического нуля, то широтномодулированные импульсы появляютсяна выходе двенадцатого элемента И 94.Во время пауз между широтно-модулированными импульсами с целью обеспечения непрерывности протекания якорного тока исполнительного двигателя6 формируются импульсы на выходахтретьего 86 и четвертого 87 элементов И-НЕ в соответствии с диаграммой(фиг. 17), Высокому уровню сигналовсоответствует замкнутое состояниепервого 97, второго 98, третьего 99 ии четвертого 100,ключей усилителя 5мощности (фиг. 17). Изменение состояния указанных ключей друг относительно друга происходит с временнымизадержками в соответствии с фиг. 16,что исключает протекание сквозных токов и повьшает надежность работы усилителя 5 мощности,Смена знака кода управления(фиг. 16) показана в момент времениТ, . При этом в момент времени Т изменяется состояние девятого триггера84, а в момент Т появляется широтномодулированный импульс. Временныезадержки ь = 1 Т 1 Т. и=Т 2 з Тз,)исключают протекание сквозных токовпри изменении знака кода управления.1 г 79пый датчик 7 вращаются со скоростью,среднее значение которой пропорционально длительности широтно-модулированных импульсов, а направлениезадается знаковым разрядом кода управления. При этом на одном иэ выходов (например, на первом) формирователя 8 импульсов появляются позиционные импульсы (фиг, 7 В). Каждый позиционный импульс изменяет на единицу содержимое третьего счетчика 37датчика 13 приращения позиции(фиг. 7 С). Первый дешифратор 14 формирует на первом выходе разрешающийсигнал, а на втором выходе - импульсный сигнал (фиг, 7 О), если текущийкод на выходе третьего счетчика 37равен И= 2 , п = 0,1,2Каждый 1-й импульс, поступающийпа второй вход сдвигающего блока 1(фиг. 1 О), обеспечивает коммутациюкаждого -го разрядного кода на егопервом входе соответствующим ш- раз -рядпым входом шестого регистра .44, 25причем ш =+ 1 - 1, где,) = 1,2п+1,Одновременно в преобразователе 10частота - код происходит формирование кода интервала, Тактирующий сигнал на его пятом входе в момент времени Т (фиг. 7 Л) переписывает кодиз первого счетчика 31 во второйсчетчик 32 (фиг. 7). Этот код равенчислу импульсов, поступивших с пятоговыхода блока 9 синхронизации за вре 35мя между приходом последнего позиционного импульса в предыдущем циклеи первого позиционного импульса в текущем цикле работы системы, Далее во 4втором счетчике 32 происходит накопление импульсов, поступающих с шестого выхода блока 9 синхронизации,При наличии разрешающего уровня навтором входе первого элемента И 36позиционные импульсы с выхода первого элемента ИЛИ 35 переписывают текущий код второго. счетчика 32 в четвертый регистр 33. В результате в последнем накапливается код интервалаИз между числом позиционных импульсовБ = 5 при и = 2 (фиг, 7 К). Код интервала Иг = М поступает на вход(адресный) блока 11 памяти, на выходекоторого появляется код, равный И= К/11,.С появлением очередного тактирующего сигнала с пятого выхода блока 9синхронизации в датчике 13 приращения позиции формируется код приращения позиции за текущий цикл работысистемы, С появлением тактирующихсигналов на четвертом и восьмом выходах блока 9 синхронизации начинается расчет очередного кода заданнойскорости на первом выходе первогорегулирующего блока 2, а также формирование кода действительной скорости на выходе сдвигающего блока 12.Так как код Б в данном случае соответствует измеренному интервалу между числом импульсов 11, = 5, то всдвигающем блоке 12 для,) = 3 обеспечивается двойной сдвиг н сторонустарших разрядов кода 11, и код действительной скорости на его выходестановится равным 11 з = 4.Далее во втором регулирующем блоке3 формируется код управления и работа системы происходит аналогично указ анному,Если после прихода каждого импульса на третий вход блока 17 контролятока (фиг, 13) выход седьмого триггера 74 устанавливается в состояние логического нуля, то на выходе четвертого элемента 75 задержки сохраняетсяуровень логической единицы и запускается одновибратор 76, Если данноесостояние на выходе четвертого элемен.та 75 задержки сохраняется в течение0,5 с, то сигнал с второго выходаблока 17 контроля тока сбрасывает кодуправления во втором регистре 28 второго регулирующего блока 3, Нулевойкод на выходе второго регистра 28сохраняется до перезапуска системы ипоявления сигнала начальной установки на входе сброса восьмого триггера78 (фиг, 13). Это обеспечивает защиту системы от аварийных режимов.Повышение точности работы цифровой системы управления достигаетсяза счет повышения точности измеренияскорости и реализации законов регулирования, обеспечивающих уменьшениеошибки по позиции и скорости. Повыше ние надежности достигается за счетисключения сквозных токов в усилителе 5 мощности, а также за счет предотвращения аварийных режимов,Формула и з о б р е т е н и яЦифровая система управления, содержащая задатчик, подключенный выходами к первым входам первого регу 7 135791 лирующего блока, соединенного первыми выходами с первыми входами второго регулирующего блока, выходы которого подключены к первым входам блока коммутации ключей, второй вход ко-торого соединен с первым выходом блока синхронизации, а первый выход - с входом усилителя мощности, соеди-. ненного первым выходом через исполнительный двигатель с входом инкрементального датчика, вторым выходомс третьим входом блока коммутации ключей, второй выход которого подключен к второму входу второго Регулиру ющего блока, первый и второй выходы инкрементального датчика соединены с одноименными входами формирователя импульсов, третий вход которого подключен к второму выходу блока синхро низации, соединенного третьим и четвертым выходами соответственно с третьими входами второго и первого регулирующих блоков, о т л и ч а ю - щ а я с я тем, что, с целью повы шения точности и надежности системы, в нее введены преобразователь частота - код, блок памяти, сдвигающий блок, дешифратор и датчик приращения позиции, первый и второй входы преоб- ЗО разователя частота - код и датчика приращения позиции соединены с соответствующими выходами формирователя импульсов, третий вход датчика приращения позиции подключен к пятому вы 35 ходу блока синхронизации, а первый, второй и третий выходы - соответственно к первым входам дешифратора, вторым входам первого регулирующего блока и второму входу дешифратора. 4 О соединенного первым выходом с третьим входом преобразователя частота - код, четвертый и пятый входы которого подключены соответственно к шестому и седьмому выходам блока синхронизации, 4 а выходы через блок памяти - к первым входам сдвигающего блока, соединенного вторым и третьим входами со- . ответственно с вторым выходом дешифратора и восьмым выходом блока синхронизации, а выходами - с вторыми входами второго регулирующего блока,7 82, Цифровая система по п, 1, о тл и ч а ю щ а я с я тем, что преобразователь частота - код содержит первый и второй счетчики, регистр, триггер, элемент ИЛИ и элемент И, первый вход преобразователя частота - код соединен с Я-входом триггера и первым входом элемента ИЛИ, а второй вход - с Б-входом триггера и вторым входом элемента ИЛИ, подключенного выходом к входу сброса первого счетчика и первому входу элемента И, второй вход которого соединен с третьим входом преобразователя частотакод, а выход - с входом записи регистра суммирующие входы первого и второго счетчиков подключены к четвертому входу преобразователя частота - код, пятый вход которого соединен с входом записи второго счетчика, подключенного информационными входами к информационным выходам первого счетчика, а информационными выходами - к первым информационным входам регистра, второй информационный вхсщ которого соединен с выходом триггера, а информационные выходы - с выходами преобразователя частота - код, 13, Цифровая система по п. 1,о т л и ч а ю щ а я с я тем, что,блок коммутации ключей содержит блокзащиты ключей, блок контроля тока ипреобразователь код - ширина импульса, первые и второй входы которогосоединены с соответствующими входамиблока коммутации ключей, а первый,второй и третий выходы - с соответствующими входами блока защиты клю- :.чей, подключенного четвертым входомк первому выходу блока контроля тока,а первым, вторым и третьим входамикоторого соединенного соответственнос шиной уставкн тока, третьим входом блока коммутации ключей и четвертым выходом преобразователя код - ширина импульса, выход блока защитыключей и второй выход блока контролятока подключены соответственно к первому и второму выходам блока коммутации ключей, 135797
СмотретьЗаявка
4040664, 01.04.1986
ПРЕДПРИЯТИЕ ПЯ А-7070
ОВОД-МАРЧУК ГРИГОРИЙ ВАСИЛЬЕВИЧ, ФИЛИППОВИЧ ВАЛЕРИЙ НИКОЛАЕВИЧ, НАЙДЕНОВ ГЕННАДИЙ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: цифровая
Опубликовано: 07.12.1987
Код ссылки
<a href="https://patents.su/11-1357917-cifrovaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система управления</a>
Устройство для сопряжения цифровой вычис-лительной машины c видеотерминалом

Номер патента: 840872
Опубликовано: 23.06.1981
Авторы: Журавлев, Корнейчук, Сенченко, Слипченко, Сороко
МПК: G06F 3/04
Метки: видеотерминалом, вычис-лительной, сопряжения, цифровой
...поступает со схемы 40 срав 55 .нения через элемент И 39, открытйй триггером 35, на выход 31 как сигнал выдачи кода на терминал и поступающий в блок 15 элементов И, который передает на информационныйвход коммутатора 16 код, содержащийся на счетчике 14 терминала. В зависимости от состояния триггера 33 режима, информация с ныходов коммутатора 16 поступает либо на дисплей 17, либо на электромеханический терминал 20. В последнем случае ин" формация проходит через узел 18 согласования уровней сигналов, служащий для согласования уровней сигналов, снимаемых от коммутатора 16 с уровнем выходных сигналов терми. нала 20, и затем через элемент 19 задержки, обеспечивающий запуск двигателя электромеханического терминала 20, на входные шины термина"...
Устройство для отладки программно-аппаратных блоков

Номер патента: 1290329
Опубликовано: 15.02.1987
Авторы: Ланда, Палагин, Сигалов
МПК: G06F 11/36
Метки: блоков, отладки, программно-аппаратных
...ИЛИ 197.Устройство работает под управлением управляющей микроЭВМ, в качестве которой может быть испОльзована, 55например, микроЭВМ УВС, и обеспечивает отладку устройства на основемикропроцессоров, например К 580 ИК 80или 8080, Системная шика управляющей1290329 5 10 5 20 5памяти разбивается на 16 сегментов,определяемых четырьмя старшими разрядами адреса. Для каждого сегмента указывается, какой сегмент памяти управляющей микроЭВМ соответствует данному сегменту памяти отлаживаемой микроЭВМ. Эта информация записывается в ЗБ 3 переадресации по информационным шинам управляющей микро- ЭВМ подключенным к информационным входам ЗБ 3 переадресации через информационные входы-выходы 118, Адрес, по которому записывается эта информация,...
Устройство для контроля блоков памяти

Номер патента: 1383449
Опубликовано: 23.03.1988
Авторы: Дебальчук, Дмитриев, Косарев, Малахов, Солошенко
МПК: G11C 29/00
...вход ключа 29 поступает вторая стробирующая последовательность (фиг. 2 з), выделяющая ошибки только в моменты воспроизведения информации из ранее записанной ячейки памяти контролируемого блока 12, что позволяет выявлять неисправные ячейки памяти, на выходах которых постоянно присутствует высокий потенциал. Запись, воспроизведение О и сравнение производятся до полного заполнения всех ячеек контролируемого блока 12 нулевыми символами,Отрицательным фронтом старшего разряда счетчика 8 адреса, выход которого соединен с входом триггера 16, последний переключается и на его выходе устанавливается высокий потенциал, поступающий на информационный вход контролируемого блока 12 и разрешающий прохождение второй и третьей стробирующих...
Способ восстановления стереофонического цифрового сигнала, закодированного кодом, обнаруживающим блоки ошибок длительностью не более n символов

Номер патента: 1555884
Опубликовано: 07.04.1990
Авторы: Гитлиц, Добровольский, Зеленин, Попов, Худяков
МПК: H04H 5/00
Метки: блоки, более, восстановления, длительностью, закодированного, кодом, обнаруживающим, ошибок, сигнала, символов, стереофонического, цифрового
...Фронта сигнала на первом входе появляется через время, равное разности максимальной и фактической длительности блока ошибок.Кроме того, входной сигнал. поступает на первый (второй) блок 7 (8), в котором он задерживается на время максимальной длительности блока оши 55 бок, увеличенное на период следования кодовых слов, с выхода этого блока задержанный сигнал поступает как на первый информационный вход первого (второго) блока 11 (12), так и на вход третьего (четвертого) блока 9 (10).В третьем (четвертом) блоке 9 (10) задержанный сигнал дополнительно задерживается на время периода следования кодовых слов, С выхода третьего (четвертого) блока 9 (10) сигнал поступает на информационный вход первого (второго) блока 13 (14), на управляющий...
Формирователь импульсов считывания для блоков памяти

Номер патента: 1273996
Опубликовано: 30.11.1986
Авторы: Заболотный, Косоусов, Максимов, Петричкович, Филатов
МПК: G11C 7/00
Метки: блоков, импульсов, памяти, считывания, формирователь
...Е , транзистор первого 4 усилительного элемента не препятствует установлению низкого уровня в точке А транзистором третьего 3 элементапредзаряда, открытым высоким потенциалом на его затворе. При этом закрывающийся транзистор второго 2 элемента пред- заряда не препятствует Формированию высокого потенциала, равного напряжению Е, на входе инвертора 6, осу.ществляемому открытым транзистором первого 1 элемента предзаряда. Инвертор 6 Формирует низкий уровень на затворе транзистора второго усилительного элемента, переводя его в открытое состояние. Окончание переходных процессов в узлах схемы характеризуется отсутствием каналов сквоэнога тока - рассеиваемая мощность при этом определяется только токами утечки р-п переходов.В режиме формирования...
Предыдущий патент: Многоканальное устройство для программного управления электрохимическими и электроэрозионными процессами маркирования
Следующий патент: Устройство для фиксации усилий контактного нажатия контактов электромагнитного реле
Случайный патент: Способ образования уплотнительного кольца на штокев пт бс1 5ш тшш