G01B 7/00 — Измерительные устройства, отличающиеся использованием электрических или магнитных средств
Устройство для измерения линейных микроперемещений

Номер патента: 1364855
Опубликовано: 07.01.1988
Авторы: Зимин, Панов, Целуйкин
МПК: G01B 7/00
Метки: линейных, микроперемещений
...электрод 3, так как последний размещен в датчике 1 ближе к электроду 5, чем электрод 2, способствующий локализации плошади съема информации датчиком 1.55Кроме того, с выхода генератора 13 на электрод 4 подается в некоторый момент времени с (Фиг.2) амплитудно 1модулированное напряжение пилообраэной Формы, фаза несущей частоты которого совпадает с фазой напряжения, действующего на электроде 2. При этом потенциал электрода 5 периодически уменьшается вследствие компенсации электрического поля электрода 3 полем электрода 4, действующими внутри диэлектрической прокладки 6, разделяющей электроды 4 и 5.В некоторых момент времени С, когда величины потенциалов, наводимых на электроде 5 электродами 3 и 4, станут равными, выходной сигнал датчика 1...
Бесконтактный датчик крайнего положения

Номер патента: 1364856
Опубликовано: 07.01.1988
Авторы: Борисевич, Гинзбург, Пилевский
МПК: G01B 7/00
Метки: бесконтактный, датчик, крайнего, положения
...через нагрузочный резистор 6и диод 3 - к положительному полюсуисточника.Параллельно нагрузочному резистору 6 подключен сглаживающий конденсатор 7. Инвертор, представляющий собой ключевой усилитель постоянного 40 тока, собран на транзисторах 8 и 9 и резисторах 10 и 11. Точка соединения коллектора транзистора 5, резистора 6 и конденсатора 7 подключена к первому выводу резистора 10, второй 45 вывод которого подключен к базе транзистора 8. Коллектор транзистора 8 через резисторы 11 и 2 подключен к отрицательному полюсу источника.Эмиттер транзистора 8 подключен 50 к базе транзистора 9, коллектор которого подключен к катоду диода 12, а эмиттер - к катоду диода 13. Анод диода 12 подключен к отрицательному полюсу источника питания, а анод диода...
Система для измерения точности позиционирования подвижных узлов машин

Номер патента: 1364857
Опубликовано: 07.01.1988
Авторы: Беккерман, Епишин, Кивензор, Малкин
МПК: G01B 7/00
Метки: машин, подвижных, позиционирования, точности, узлов
...8 управления, связанноговыходами с блоком 3 накопления данных, коммутатором 4, буферным накопителем 9, блоком 10 накопления абсолютного значения погрешности. Блок 10одним из входов соединен с коммутатором 4, а выходом - с узлом 11 допускового контроля, который снабженсветовым 12 и звуковым 13 сигнализаторами.Устройство работает следующим образом.При перемещении контролируемого подвижного узла машины с выхода измерительного преобразователя 1 поступает сигнал, несущий информацию о величине и направлении перемещения.Нормирующий преобразователь 2 вырабатывает на импульсном выходе последовательность импульсов, число которых соответствует величине перемещения, при этом постоянный потенциал1364857 сигнализаторы. 45 ВНИИПИ Заказ 6576/31...
Датчик линейных перемещений

Номер патента: 1366867
Опубликовано: 15.01.1988
МПК: G01B 7/00
Метки: датчик, линейных, перемещений
...измеряемого перемещения х шток 5 с ферромагнитным сердечником 6 занимает некоторое положение внутри корпуса 1. При этом сердечник 6 может оказаться как внутри катушки 2, так и вне ее. По сигналу с блока управления (не показан) к измерительной схеме (не показана) последовательно подключают секции 3 и 4 катушки 2 индуктивности и сравнивают снимаемые с них электрические сигналы И, и И.Соотношение М, 11 означает, что сер 66867 2 дечник 6 либо находится слева от катушки 2,либо большая его часть вдвинута в секцию 3. По сигналу с блока 5управления включается шаговый двигатель 9, вал которого поворачиваетсяна строго определенный угол, чтообеспечивает смещение катушки 2 с помощью винтовой передачи по направляющим 10 на один шаг .4 в направлении...
Устройство для измерения линейных размеров

Номер патента: 1366868
Опубликовано: 15.01.1988
Авторы: Злобин, Ивашин, Сыроватский
МПК: G01B 7/00
...2 датчика 1 (фиг.1)соединена согласно со вторичной обмоткой второй катушки 3, а вторич 35ная обмотка первой катушки 2 соединена встречно с первичной обмоткойвторой катушки 3. Такое соединениеобмоток позволяет значительно умень 4 шить влияние изменений внешних условий на результаты измерения.Устройство работает следующим образом,Контролируемые изделия поочередноподаются автоматическим транспортным устройством (не показано) на позиции измерения, оснащенные трансформаторными датчиками 1,В процессе измерения линейногоразмера изделия измерительный шток 4с сердечником 5 трансформаторногодатчика 1 перемещается и сигнал,пропорциональный контролируемому размеру, подается с выходных обмотокдатчика 1 через коммутатор 6 и первый детектор.9 на...
Индукционный преобразователь линейных перемещений

Номер патента: 1366869
Опубликовано: 15.01.1988
Авторы: Алешина, Андреев, Лузинский, Петропольский
МПК: G01B 7/00
Метки: индукционный, линейных, перемещений
...к соответствующему источ"нику 7-9 переменного тока создаюУ45щему заданную стабилизированную амплитуду тока в подключенной к нему .паресекций. Поскольку линейные индукционные преобразователи с плоскимипечатными обмотками (типа индуктсин)характеризуется тем;,что токи в со 50седних рабочих проводниках печатныхобмоток протекают во взаимно противоположных направлениях, а длинаактивной зоны движка обычно меньшедлины активной зоны линейки, это .обуславливает увеличение напряженности электромагнитного поля возбуждения (до 153) в направлении к концам несекционированной обмотки возбуждения, так как при смещении движка ккакому-либо краю линейки, слева исправа от него оказывается разноеколичество рабочих проводников возбуждающей обмотки...
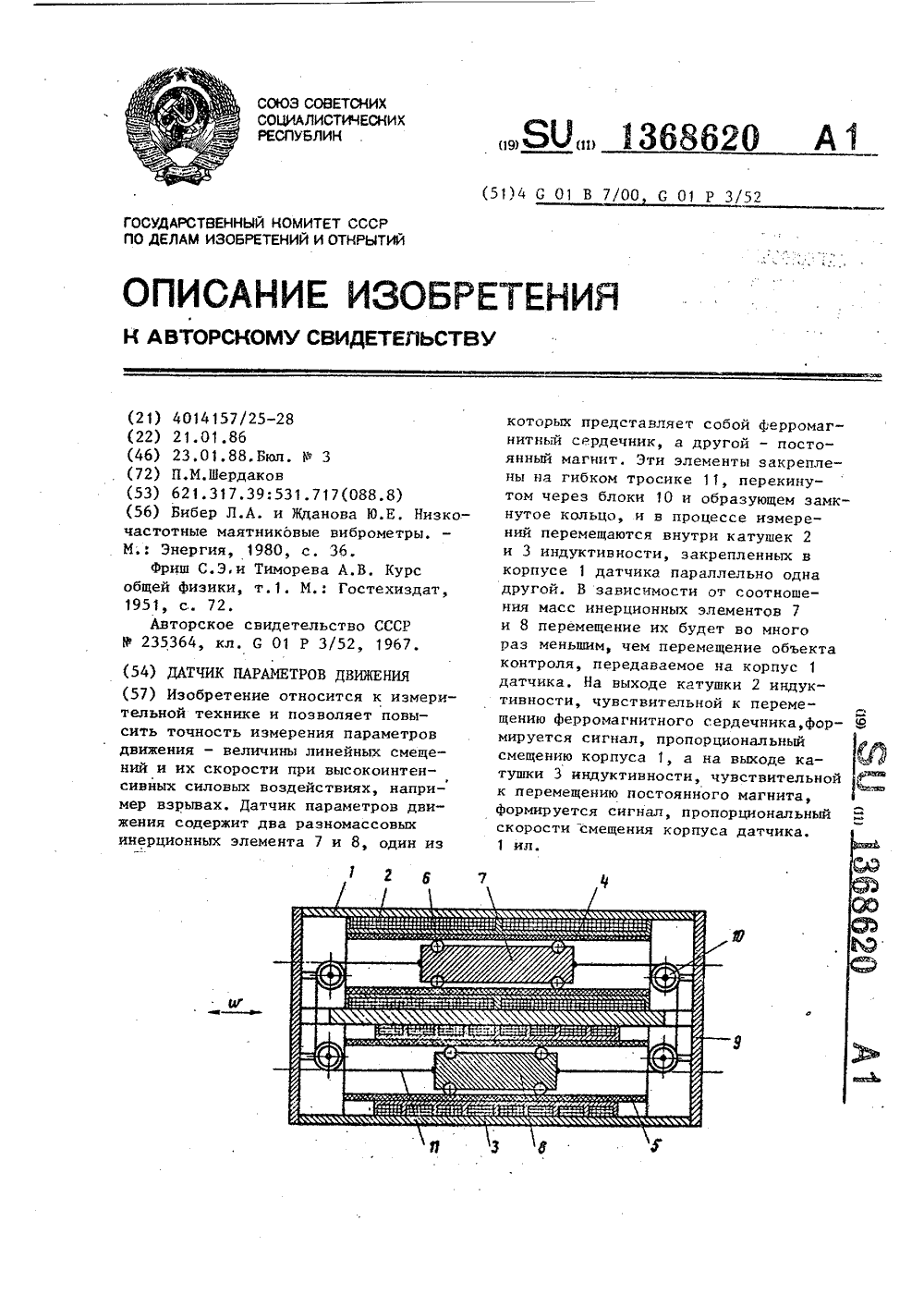
Датчик параметров движения
Номер патента: 1368620
Опубликовано: 23.01.1988
Автор: Шердаков
МПК: G01B 7/00, G01P 3/52
Метки: датчик, движения, параметров
...содержит корпус 1, связываемый в процессе измерения с контролируемым объектом (не показан), закрепленные в корпусе 1 двухсекционную дифференциальную катушку 2 и многосекционную катушку 3 индуктивностиВнутри катушек 2 и 3 индуктивности размещены направляющие стаканы 4 и 5, в которых установлены с возможностью перемещения на шарикоподшипниках 6 разномассовые инерцион. - ные элементы 7 и 8. Инерционный элемент 7 выполнен в виде ферромагнитного сердечника, а инерционный элемент 8 - в виде постоянного магнита. На торцовых стенках 9 корпуса 1 закреплены блоки 10, через которые перекинут гибкий тросик 11, образующий замкнутое кольцо, на нем закреплены сердечник и магнит, образующие разномассовые инерционные элементы датчика. Катушки 2 и...
Устройство для измерения линейных перемещений

Номер патента: 1374036
Опубликовано: 15.02.1988
Авторы: Кривогин, Полулях, Рак, Тополов
МПК: G01B 7/00
Метки: линейных, перемещений
...2-2 И-ИЛИ-НЕ 6 на вычитающий вход третьего счетчика 10 импульсов, импульсов с выхода третьего автогенератора 4 через элемент 2 И-НЕ 7 на суммирующий вход второго счетчика 9 импульсов.В силу приведенного выше соотношения периодов автогенераторов первым обнуляется первый счетчик 8.импуль О сов. За это время формируется интервал (фиг. 2).45который одновременно квантовался импульсами с периодами следования Т , в результате чего во втором счетчике 9 импульсов формируется код50фТ (2)Импульс с выхода обратного переноса(фиг.1) первого счетчика 8 импульсовпоступает на первый вход блока 11управления, который с третьего выходавыдает команду на запись кода Б, впервый счетчик 8 импульсов. Счет им(3) г 11 о который одновременно квантовался во втором...
Датчик перемещений

Номер патента: 1374037
Опубликовано: 15.02.1988
Авторы: Герасименко, Калайджян, Малков, Рогожкин
МПК: G01B 7/00
Метки: датчик, перемещений
...электромагнита 14 и предназначена для удержания вала потенциометра точного отсчета в начальном положении при установочных перемещениях измеряемого объекта,которые не требуется измерять точно, а электромагнит 14 и пружина 12 с упором 13 выполняют функции управляющего элемента фрикционной муфты и обеспечивают отвод упора 13 перед измерением малых величин перемещения с помощью потенциометра 2 точного отсчета.Для увеличения силы притяжения электромагнитом его пластинчатого якоря на пружине 12 имеется накладка 15 из магнитомягкого материала. Конец пружины 12 со стороны упора 13 уширен (фиг.З) для обеспечения такого взаимодействия ее с выступом 10 пластины 7, при котором выступ 10 имеет возможность отжимать пружину 12 лишь при обратном...
Датчик перемещения

Номер патента: 1377572
Опубликовано: 28.02.1988
МПК: G01B 7/00
Метки: датчик, перемещения
...схеме 45 (не показана) . В дифференциальном исполнении он содержит две подложки со сформированными в каждой из них истоком, каналом и стоком и размещенный между ними общий подвижный элемент (якорь), на обеих поверхностях которого закреплены электроды- затворы.Датчик перемещения работает следующим образом.При перемещении подвижного затвора 4 по координате У в направлении изменения зазора ЬГ между ним и подложкой МДП-структуры происходит из 50 чены соответственно источники 9-11напряжений Цщ, П и Пс, выборомсоотношения величйн напряжений которых обеспечивается работа датчика,представляющего собой. фактическиканальный (металл - диэлектрик - полупроводник) МДД-транзистор с подвижным затвором, в режиме сильной инверсии на пологом участке его...
Устройство для измерения пространственных перемещений

Номер патента: 1379598
Опубликовано: 07.03.1988
Авторы: Ежов, Жевелев, Кравчук, Леонович
МПК: G01B 7/00
Метки: перемещений, пространственных
...разрешающий прохождеа от катушки 4 на вход 16, Усиленный синусоидальдетектируется при помощи о детектора 18 и интегринескольким периодам интег. Разрешение на интегрироупает на интегратор 19 с соответствующего выхода блока 17 управления. На выходе интегратора 19 получается постоянный электрический сигнал, амплитуда которого соответствует однозначно амплитуде синусоиды на выходе катушки 4, При помощи АЦП 20 получают цифровой код, соответствующий амплитуде указанного сиг нала. По сигналам с блока 17 управления осуществляется запоминание цифрового кода в вычислительном блоке 21,Аналогично производится оцифровывание электрических сигналов, индуктированных в катушках 5, 6 и 7-9,при этом соответственно включаются аналоговые ключи 11, 12...
Способ измерения линейных перемещений

Номер патента: 1379599
Опубликовано: 07.03.1988
Авторы: Блохин, Васильев, Ефимов, Левин
МПК: G01B 7/00
Метки: линейных, перемещений
...х подвижного анода при поддержании неизменным напряжения на обоих анодах механотрона, величину которого выбирают в зависимости от выбранного поддиапазона измеряемых перемещений в соответствии со следующим математическим выражением:(2 с 1 -ас 2) (и с 3 -1 сйс 1)35к о 1 с(сто-дс 3) (2 пс 1 о 1 сдс 1) 3 где с 1 - минимальное напряжение наоанодах механотрона, при котором обеспечивается его работа в заданном диапазонеизмеряемых перемещений,Й, - расстояние между неподвижныманодом и катодом механотрона; 45ЬЙ - заданный диапазон измеряемых перемещений;и - количество поддиапаэонов,- порядковый номер поддиапаэона.50В соответствии с указанным математическим выражением заданный диапа.зон М измеряемых перемещений разбивают на и поддиапазонов и в...
Преобразователь линейных перемещений в частотный сигнал

Номер патента: 1379600
Опубликовано: 07.03.1988
Авторы: Беляков, Голяев, Зябиров, Мартяшин, Чернецов
МПК: G01B 7/00
Метки: линейных, перемещений, сигнал, частотный
...содержит первыйплоский реэистивный элемент 1, расположенный параллельно ему в той жеплоскости неподвижный электрод 2, выполненный в виде пластины длиной, равной длине первого резистивного элемента 1, и подвижный электрод 3, выполненный в виде протяженной пластины,расположенной с зазором относительнопервого резистивного элемента 1 и неподвижного электрода 2, По другуюсторону подвижного электрода 3 параллельно первому резистивному элементу1 размещен идентичный ему по размерами электрическому сопротивлению второйрезистивный элемент 4, подключенныйк первому резистивному элементу 1 параллельно. Подвижный электрод 3 размещен на изоляционном основании (непоказано), связываемом в процессе измерений с объектом контроля (не показан), Клеммами...
Преобразователь линейных перемещений

Номер патента: 1381325
Опубликовано: 15.03.1988
Авторы: Голяев, Зябиров, Мартяшин, Чернецов
МПК: G01B 7/00
Метки: линейных, перемещений
Устройство для измерения линейных перемещений

Номер патента: 1383087
Опубликовано: 23.03.1988
Авторы: Болдырев, Бочаров, Иванов, Москалев, Шаронов
МПК: G01B 7/00
Метки: линейных, перемещений
...с объектом контроля в 25процессе измерений. Компенсирующийтрансформатор, содержащий первичную4 и вторичную 4 обмотки, включенпоследовательно с трансформаторнымдатчиком. При этом первичная 1 и вторичная 2 обмотки трансформатора датчика включены последовательно с одноименными обмотками 4 и 5 компенсирующего трансформатора, вторичнаяобмотка 5 которого подключена к фазосдвигающей цепи 6 через переменныйрезистор 7, Конденсаторы 8 и 9 подключены к части витков в начале иконце первичной обмотки 1 датчика,которая подключены к источнику 10питания переменного тока. Емкость40конденсатора 8 выбирают так, чтобыпри введении ферромагнитного сердечника 3 до половины начального участка первичной обмотки 1 датчика,образованный параллельный контур...
Датчик контроля положения

Номер патента: 1388699
Опубликовано: 15.04.1988
Автор: Кириллов
МПК: G01B 7/00
...- диаграмма изменения частоты 30 частотнозадающего колебательного контура 5 при приближении контролируемого объекта к чувствительному элементу 1;б - диаграмма изменения частоты на35 выходе линии 2 задержки;в - диаграмма формирования разностной частоты на выходе смесителя 7;г - диаграмма напряжения на выходе полосового фильтра 3;40. д - диаграмма напряжения на выходе выпрямителя 4.Датчик контроля положения работает следующим образом.В исходном состоянии, когда конт 45 ролируемый объект находится на значи тельном расстоянии от чувствительного элемента 1, и частота Р колеба тельного контура 5 не отличается от частоты Р(с ) на выходе линии 2 за350 держки, сигнал на выходе полосового фильтра 3 и соответственно на выходе выпрямителя 4...
Устройство для бесконтактного измерения перемещений

Номер патента: 1388700
Опубликовано: 15.04.1988
МПК: G01B 7/00
Метки: бесконтактного, перемещений
...И 10, выход которого через последовательно включенные фильтр 11 низкой частоты и усилитель 12 постоянного тока подключен к выходу блока 13 регистрации., и шину 14 нулевого потенциала.Устройство работает следующим образом. 30В зависимости от расстояния между обмотками 1 и 2 изменяется амплитуда сигнала Б на входе усилителя-ограничителя 4 и первом входе сумматора 5.Из выходного сигнала П 4 усилителя ограничителя 4 на втором входе сумматора 5 фильтром б, фазосдвигающим блоком 8 и делителем 9 формируется опорный сигнал Б = Б,. Сдвиг фазымежду Б 4 и Б, определяется выраже нием Анализ зависимости ср = Г(о) (где 8 - измеряемое перемещение) проводят с помощью векторной диаграммы суммированием сигналов БР и 11, (фиг.З) или временной...
Преобразователь линейных перемещений

Номер патента: 1388701
Опубликовано: 15.04.1988
Авторы: Ковалев, Кузнецов, Хамитов
МПК: G01B 7/00, G01H 11/02
Метки: линейных, перемещений
...механической прочности диаметр сердечника 8 в области выточек 9 и 1 О не должен быть менее 80-907 от диаметра сердеч" ника 8 в его средней части. В том случае, если монтаж преобразователя в корпусе объекта невозможен, то сердечник 8 жестко связывается с подвижным органом объекта. В исходном положении сердечника 8 его кольцевые выточки 9 и 10 располагаются симметрично относительно обмоток 4 и 5 возбуждения за пределами торцов кожуха 11, Электромагнитные поля обмоток 4 и 5, сосредоточенные в области выточек 2 и 3 корпуса 1, проходя к поверхности сердечника 8 через сквоз" ные пазы 12, одинаково экранируются этой поверхностью. Размеры зоны сосредоточения магнитного поля могут быть сделаны достаточно малыми, а потому малыми могут...
Емкостно-электронное устройство для преобразования перемещения

Номер патента: 1392338
Опубликовано: 30.04.1988
Автор: Сиразетдинов
МПК: G01B 7/00
Метки: емкостно-электронное, перемещения, преобразования
...напряжения равной амплитуды, при этом емкостный датчик 4 запитывается импульсами по.пожительной полярности, а конденсатор 7 - импульсами отрицательной по О лярности. В точке соединения диода 2 и резистора 3 формируются импульсы напряжения с длительностью спада, определяемой постоянной времени цепи разряда емкостного датчика 4, а в 5 точке соединения диода 5 и резистора 6 - импульсы напряжения с длительностью спада, определяемой постоянной времени цепи разряда конденсатора 7, На выходе фильтра 8 низких частот формируется напряжение, пропорциональное среднему значению суммы импульсных напряжений на емкостном датчике 4 и конденсаторе 7. Если входное сопротивление Фильтра 8 низких частот достаточно велико, что достигается выбором элементов...
Дифференциально-трансформаторный датчик перемещений
Номер патента: 1392339
Опубликовано: 30.04.1988
МПК: G01B 7/00
Метки: датчик, дифференциально-трансформаторный, перемещений
...измерительной обмотки 4 и рабочего торца сердечника 2 зазором Фр, ве 35личина которого зависит от перемещения Х объекта контроля. Цилиндрический корпус датчика выполнен со ступенчато измененным диаметром в видедвух частей, размеры которых выбраныиз следующих условий:0,650 с й с 0,90;Р - й1 с 1,29где Й - диаметр узкой части корпуса;Э - диаметр широкой части корпуса;1 - длина широкой части корпуса;Ь - общая длина корпуса датчика,Дифференциально-трансформаторныйдатчик перемещений работает следующим образом,При перемещении подвижного якоря 7 относительно торца измерительной части датчика в направлении Хувеличивается или уменьшается величина рабочего зазора д, в то время каквеличина компенсационного зазораостается неизменной. В...
Автогенераторный дифференциально-трансформаторный преобразователь перемещений

Номер патента: 1397706
Опубликовано: 23.05.1988
Автор: Кирюшин
МПК: G01B 7/00
Метки: автогенераторный, дифференциально-трансформаторный, перемещений
...транзистора 13 (кольцо замкнулось, положительная обратная связь) . Процесс лавинообразного нарастания тока коллекторов транзисторов 9 и 13 заканчивается в момент "пробоя" стабилитронов 10 и 12, В этот момент положительная обратная связь переходит в отрицательную и стаоилизирует напряжение на стабилитронах 10 и 12 и токи через них. Причем осуществляется принцип кольцевой стабилизации, а именно: чем стабильнее напряжение на стабилитроне 12 тем стабильнее ток через стабилитрон 10, тем стабильнее напряжение на нем и стабиль13906 15 30 35 40 45 50 55 нее ток через стабилитрон 12, а чем стабильнее ток через него, тем стабильнее напряжение на нем (кольцо замкнулось) .сСледовательно, в.момент подключения источника питания к устройству...
Емкостный двухкоординатный измеритель перемещений

Номер патента: 1397707
Опубликовано: 23.05.1988
Авторы: Гриневич, Продан, Сурду
МПК: G01B 7/00
Метки: двухкоординатный, емкостный, измеритель, перемещений
...коэффициентами деления управляеььж делителей 18 и 1" .напряжения так, что выходные нап-, .;ениясумматоров 14 и 15 равны:-ул .Пусть потенциальный лектрод 2расположен точно посередине токовогоэлектрода 3. Тогда площади перекрытия Б, Б, Б, Б 4 сек,.ий 3,1, 3,2,3.3 и 3.4 токового электрода 3 равныКоэффициенты деления д;.лителей 18 и19 равны нулю, что говорит о нулевомсмещении по осям Х и У.При смещении потенциального электрода 2 вдоль оси Х глощади перекрытия Б ф Б Б Б изменяются гак,что суммы Б + Б, Б + Б остаютсяпрежними, а суммы Б + Б и Б + Бизменяются, при этом коэффициент деления делителя 19 остается прежним,а коэффициент деления делителя 18изменяется.Измеряемое перемещение по оси Хв этом случае однозначно определяется значением...
Электромагнитный преобразователь линейного перемещения

Номер патента: 1401254
Опубликовано: 07.06.1988
Авторы: Ганеев, Никонов, Хайруллина, Черных
МПК: G01B 7/00
Метки: линейного, перемещения, электромагнитный
...коммутатор 18, выполненный в виде пары соединенных выходами управляющих электронных ключей 19 и 20, управляемые входы которых соединены с управляющими выходами 15 и 16 микро-ЭВМ 13, Вход. ключа 19 соединен с началом обмотки 4 возбуждения, а вход клича 20 - с концевым выводом измерительной обмотки 3. К затвору МОП-транзистора 8 подключен управляющий вход ключа 19.1Электромагнитный преобразователь линейного перемещения работает в два такта. Первый такт - градуировочный, а второй - измерительный, Управление работой преобразователя (переключение из градуировочного режима в измерительный) выполняется автоматически с помощью микро-ЭВМ 13, В градуировочном режиме на выходе 6 микро-ЭВМ 13 формируется с игнал высокого уровня, а на...
Преобразователь для резистивных датчиков

Номер патента: 1402798
Опубликовано: 15.06.1988
Авторы: Александров, Дымарский, Примак, Пузанков, Шейко
МПК: G01B 7/00
Метки: датчиков, резистивных
...соединены с входами дешифратора и вторыми входами регистратора 19; выходы дешифратора 18 соответственно подключены к группе входов коммутатора 2, первый вход регистратора 19соединен с выходом первого усилителя 5. Устройство работает следующим образом.При подаче питания на выходе преобразователя 17 напряжение в к устанавливается нулевой двоичный код, в результате чего к источнику 1 тока с помощью коммутатора 2 подключен первый опорный резистор блока 3. Установившееся (через некоторое время) напряжение на выходе усилителя 7 равноЫ- = 2 Игде Яд - сопротивление датчика;1 - ток от источника 1, протекаюшийчерез сопротивления Яоо блока 3 РаПо этому сигналу преобразователь 17 производит преобразование указанного напряжения в код,...
Способ измерения перемещений

Номер патента: 1402799
Опубликовано: 15.06.1988
Авторы: Евстюхин, Князев, Тарасов, Яковлев
МПК: G01B 7/00
Метки: перемещений
...градуировочных характеристик преобразования.После размещения объекта контролявместе с обоими преобразователями перемещения в экстремальных условиях эксплуатации измеряют выходные сигналы обоихпреобразователей, соответствующие перемещениям, напримерХ и Х 2 контролируемогообъекта контроля, и сравнивают измеренныесигналы с их значениями на соответствующих градуировочных характеристиках преобразования, полученных в нормальных условиях окружающей среды.Поскольку градуировку преобразователей в рабочих (экстремальных) условияхэксплуатации осуществить затруднительно,например, при облучении в реакторе, темболее что в этих условиях чувствительностьпреобразователей нестабильна и может довольно значительно изменяться во временипроизвольным образом,...
Способ измерения геометрических параметров детали

Номер патента: 1404800
Опубликовано: 23.06.1988
Автор: Иванов
МПК: G01B 7/00
Метки: геометрических, детали, параметров
...5 и 6, создающие неоднородное поле с п осто ян н ым градиентом. Резул ьтирующее поле Н при этом направлено по-прежнему вдоль оси г,. Сразу же после прекращения действия импульса возникает свободная прецессия протонов в плоскости ХУ. При этом частота ь в каждом сечении оси У (слое) пропорциональна напряженности Н магнитного поля.В -м сечении где у - гиромагнитное отношение;и - число слоев в емкости 1, определяемое разрешающей возможностью аппаратуры.Сигналы свободной прецессии улавливаются с помощью приемных катушек 9, Сигналы катушек 9 поступают в вычислительный блокО, где подвергаются Фурье-преобразованию и последующей регистрации в памяти вычислительного блока 1 О. В результате получают амплитуды сигналов на каждой из частот ы,...
Устройство для преобразования линейных перемещений в частоту

Номер патента: 1404801
Опубликовано: 23.06.1988
Авторы: Абрамушкин, Левицкий
МПК: G01B 7/00
Метки: линейных, перемещений, преобразования, частоту
...через последовательно соединенные предварительный усилитель 5 и фильтр 6 подсоединен к входу усилителя-ограничителя 7, выход генератора 8 тока подсоединен к входу питания датчика 4 ЯМР.Входная обмотка 3 предназначена лля создания постоянного магцитного поля, датчик 4 ЯМР - лля преобразования измеряемого магцитцого поля в частоту, предварительный усилитель 5 - лгя уси,с.ция сцгца 1 д 5 лс 1 рцОЙ ицдъкции В Виде напряжения сицусоилальной затухающей формы, поступающего с выхода датчика 4 ЯМР, фильтр 6 цредцазцачен лля выделения полосы частот сипала ядерной индукции, усилитель-ограничитель 7 - для преобразования синусоилального затухающего напряжения сипала ядерной индукции в цос,еловательность импульсов прямоугольной формы, генератор 8...
Преобразователь перемещений в постоянный ток

Номер патента: 1406449
Опубликовано: 30.06.1988
Автор: Сазонов
МПК: G01B 7/00
Метки: перемещений, постоянный, ток
...двухполярные импульсы, положительный импульс соответствует переднему фронту импульса П отрицательный - заднему.Полученные импульсы, пройдя через выпрямитель 13 (выполненньй, например, по диодной.мостовой схеме), цреобра,эуются в узкие однойолярные положительные импульсы,Б а (фиг.2 е) период которых равен половине перно" да питающего напряжения 11(фиг.2 а). Моменты появления этих импульсов со" ответствуют моментам перехода тока 1через нуль.Импульсы 11 поступают на входы двух элементов 2 И 14 и 15. На другие входы этих элементов подаются импульсы напряжений ц 1 (Фиг.2 ж) и П (Фиг.2 з), длительность которых равна половине периода Ц, и которые сдви" нуты относительно друг друга на половину периода Б. Эти импульсы полу" чаются...
Система индикации положения регулирующего органа

Номер патента: 1408201
Опубликовано: 07.07.1988
Авторы: Хробостова, Чижиков
МПК: G01B 7/00
Метки: индикации, органа, положения, регулирующего
...установленного минимального (порогового для всейсистемы) значения,При включении устройства импульсы сгенератора 11 импульсов, проходя через элементы НЕ 2 и ИЛИ - НЕ 10, поступают на 5 О 15 20 25 30 35 40 45 вход реверсивного счетчика 9. Сигнал с выхода счетчика осуществляет управление коммутатором 1, подключая поочередно датчики. После появления сигнала второй гармоники с какого-либо датчика срабатывает один из компараторов, настроенных один на нижний, другой на верхний уровень диапазона измерения. При поступлении сигнала с любого компаратора запирается элемент ИЛИ - НЕ 10, в результате чего счетчик прекращает поочередное подключение элементов. При срабатывании компаратора 5 подается разрешающий сигнал на элемент И 8, подключая...
Устройство для бесконтактного контроля положения объекта

Номер патента: 1411567
Опубликовано: 23.07.1988
МПК: G01B 7/00
Метки: бесконтактного, объекта, положения
...работает следующим обраС выхода генератора 6 переменное напряжение подается на фокусирующий элекгрод 2 датчика 1, а на потенциальный элекгрод 3 это же напряжение, но сдвинутое по фазе иа 90 посредством двух фазовращаюи 1 х звеи 1 ев 7 и 8, подается через делитель 9 напряжения.При этом в воздушном зазоре между дат- иком 1 и поверхностью контролируемого объекта 16 создается переменное электриеское поле, являющееся суперпозицией полей. создаваемых каждым из электродови рника 1 в отдельности. В результате мгнои иое значение наведенного потенциала измерите,1 ьного электрода 4 определяется и,гсбраической суммой потенциалов, наводимых на нем электродами 2 и 3.11 оскольку прикладываемые к электродам 2 и 3 переменные напряжения...