Датчик параметров движения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1368620
Автор: Шердаков
Текст
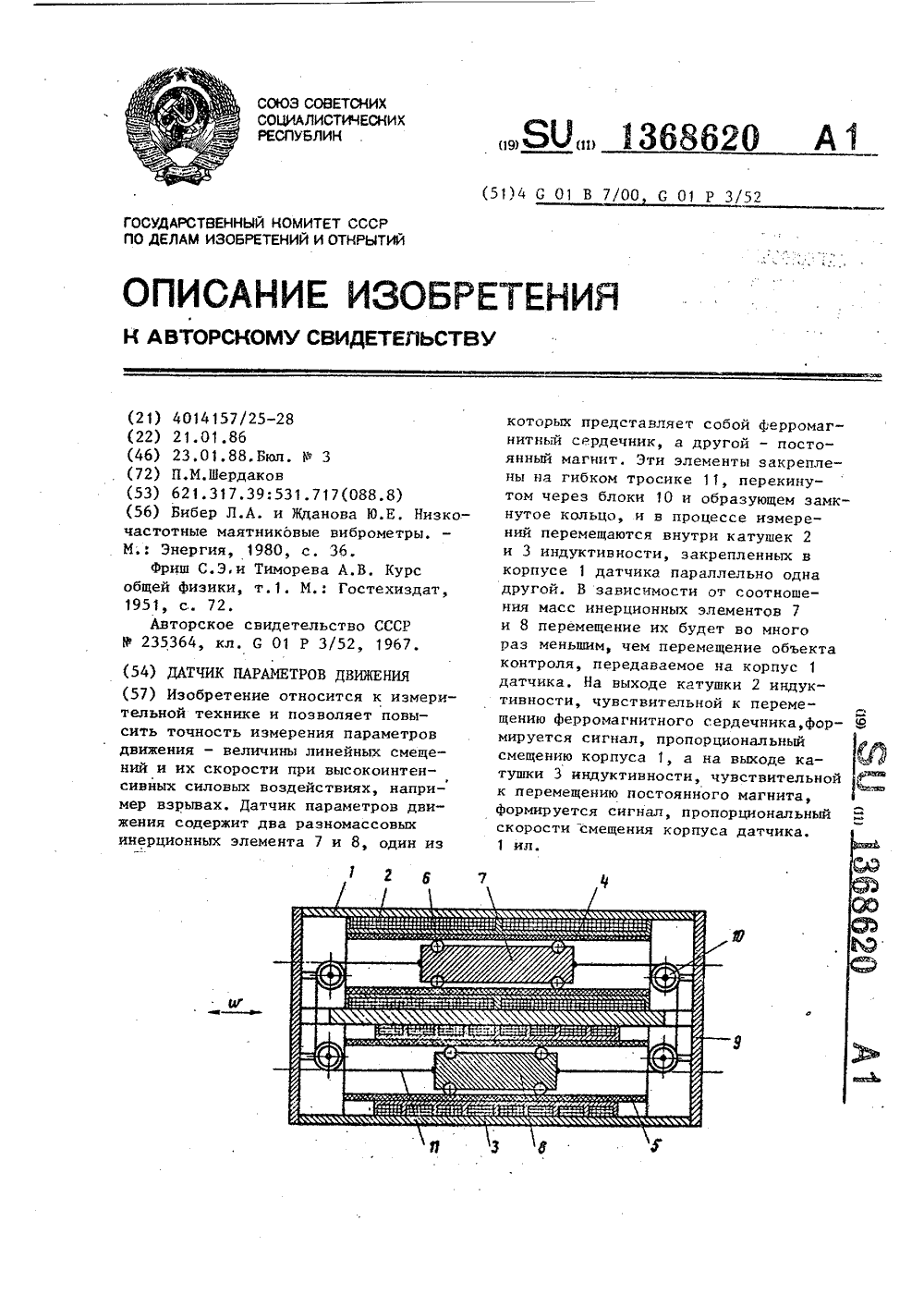
,ЯО 1368 ОПИСАНИЕ ИЗОБРЕТЕНИН АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(53) 62.317.39:531.717(088.8) (56) Бибер Л.А. и Щцанова Ю.Е. Низко частотные маятниковые виброметры. М.: Энергия, 1980, с. 36.Фриш С.Э,и Тиморева А.В. Курс общей физики, т.1. М.: Гостехиздат, 1951, с. 72.Авторское свидетельство СССР У 235364, кл. С 01 Р 3/52, 1967. (54) ДАТЧИК ПАРАМЕТРОВ ДВИЖЕНИЯ (57) Изобретение относится к измерительной технике и позволяет повысить точность измерения параметров движения - величины линейных смещений и их скорости при высокоинтенсивных силовых воздействиях, например взрывах. Датчик параметров движения содержит два разномассовых инерционных элемента 7 и 8, один из 51)4 0 О 1 В 7/00 С 01 Р 3/52 которых представляет собой ферромагнитный сердечник, а другой - постоянный магнит. Эти элементы закреплены на гибком тросике 1 1, перекинутом через блоки 10 и образующем замкнутое кольцо, и в процессе измерений перемещаются внутри катушек 2 и 3 индуктивности, закрепленных в корпусе 1 датчика параллельно одна другой. В зависимости от соотношения масс инерционных элементов 7 и 8 перемещение их будет во много раз меньшим, чем перемещение объекта контроля, передаваемое на корпус 1 датчика, На выходе катушки 2 индуктивности, чувствительной к перемещению ферромагнитного сердечника,фор- Ж мируется сигнал, пропорциональный смещению корпуса 1, а на выходе катушки 3 индуктивности, чувствительной к перемещению постоянного магнита, формируется сигнал, пропорциональный ф скорости смещения корпуса датчика. 1 ил.136 8620 Тираж 680. Подписное ВНИИПИ Заказ 273/38 Произв.-полигр. пр-тие, г. Ужгород, ул, Проектная, 4 Изобретение относится к измерительнойтехнике и может быть использовано для измерения скорости и величины линейных перемещений объектов грунта или сооружений при высокоинтенсивных силовых воздействиях, например взрывах.Цель изобретения - повышение точности за счет исключения динамической и ротационной погрешностей, обусловленных различием частоты собственных колебаний инерционного элемента датчика и частоты контролируемых колебаний.На чертеже представлен параметр движения, общий вид.Датчик содержит корпус 1, связываемый в процессе измерения с контролируемым объектом (не показан), закрепленные в корпусе 1 двухсекционную дифференциальную катушку 2 и многосекционную катушку 3 индуктивностиВнутри катушек 2 и 3 индуктивности размещены направляющие стаканы 4 и 5, в которых установлены с возможностью перемещения на шарикоподшипниках 6 разномассовые инерцион. - ные элементы 7 и 8. Инерционный элемент 7 выполнен в виде ферромагнитного сердечника, а инерционный элемент 8 - в виде постоянного магнита. На торцовых стенках 9 корпуса 1 закреплены блоки 10, через которые перекинут гибкий тросик 11, образующий замкнутое кольцо, на нем закреплены сердечник и магнит, образующие разномассовые инерционные элементы датчика. Катушки 2 и 3 индуктивности включены э измерительную схему (не показана).Датчик параметров движения работает следующим образом.4 При перемещении корпуса 1, вслед" ствие разности сил, действующих на разномассовые инерционные элементы 7 и 8 и направленных навстречу одна другой, возникает результирующая сила инерции, равная разности указанных сил. Ускорение, с которым перемещаются инерционные элементы 7 и 8 относительно корпуса 1, оказывается в К раз меньшим, где С, - С 2К= ----- , чем ускорение корпуС С 2са 1,(С .и С 2 - вес инерционныхэлементов 7 и 8, весами блоков 10пренебрегают).Вследствие этого за тот же интервал времени перемещения корпуса 1перемещение инерционных элементов 1 О 7 и 8 датчика окажется в К раэ меньшим. Варьируя вес инерционных элементов 7 и 8, можно в широких пределах менять диапазон работы датчика.Перемещение инерционного элемента 7 15 регистрируется с помощью катушки 2индуктивности. В катушке 3 при перемещении элемента 8, выполненногов виде постоянного магнита, генерируется сигнал, пропорциональный ско О рости перемещения корпуса 1, чтодает информацию о скорости движенияконтролируемого объекта.Предлагаемый датчик может быть использован для измерения не только 25 горизонтальных, но также вертикальных смещений (или некоторых наклонных смещений) . В этом случае тросик11 должен быть натянут настолько,чтобы возникающие в блоках 10 силы 30 трения уравновешивали разность весов инерционных элементов 7 и 8.Отсутствие упругих подвесов инерционных элементов датчика и выполнение чувствительного элемента немаятниковым позволяет исключить динамические и ротационные погрешности и,повысить прочность измерения.формула. изобретения 40 Датчик параметров движения, со-держащий корпус и размещенные в немдва раэномассовых инерционных элемента, две катушки индуктивности и взаимодействующие с ними ферромагнит ный сердечник и постоянный магнит,о т л и ч а ю щ и й с я тем, что,с целью повышения точности, он снабжен закрепленными на торцах корпусаблоками и перекинутым через них гиб-ким тросиком, образующим замкнутоекольцо, а ферромагнитный сердечники постоянный магнит закреплены натросике и расположены внутри катушекиндуктивности.
СмотретьЗаявка
4014157, 21.01.1986
ВОЙСКОВАЯ ЧАСТЬ 51105
ШЕРДАКОВ ПЕТР МИХАЙЛОВИЧ
МПК / Метки
Метки: датчик, движения, параметров
Опубликовано: 23.01.1988
Код ссылки
<a href="https://patents.su/2-1368620-datchik-parametrov-dvizheniya.html" target="_blank" rel="follow" title="База патентов СССР">Датчик параметров движения</a>
Способ изготовления корпусов датчиков

Номер патента: 309256
Опубликовано: 01.01.1971
Авторы: Володин, Журавлев, Краснов, Маль, Ополовенков, Остроумов, Стрелков
МПК: G01K 1/08
...трудности, вытекающие из свойств фторопластов, в создании достаточно надежных конструкций узлов уплотнения в местах вывода чувствительных элементов датчика, например электродов в индукционных расходомерах, электродов в емкостных сигнализаторах уровня и т. п,Предлагается новый способ изготовлениякорпуса датчика, заключающийся в том, что электроды, изготавливают из особой токо- проводящей композиции на основе, например, 5 фторопласта, что дает возможность разработать герметический узел вывода. Корпус датчика также изготовляют из фторопласта с обмоткой стеклолентой или стекложгутом, пропитанным связующими смолами. Такой дат чик может рабо. ать в условиях высокоагрессивных сред при температуре до 150 в 2 С.Для защиты ст внешних...
Датчик параметров движения объекта
Номер патента: 983544
Опубликовано: 23.12.1982
МПК: G01P 13/00
Метки: датчик, движения, объекта, параметров
...устройства является сравнительно узкая область использования, ограниченная возмож-ностью определения только наличия дви"ЗДатчик состояния объекта содержитгерметичный корпус 1 с полостью 2, вкоторой размещены индуктивные чувствительные элементы 3 и 4,-направляющая 5 инерционный элемент б, выполФ5ненный в виде многослойного цилиндрас чередующимися концентрически расположенными слоями пррводника 7 и диэлектрика 8. Стенка герметичного корпуса 1 и направляющая 5 образуют финсаторы положения 9 и 10. Герметичныйкорпус 1 имеет крышку 11 и поворотную штангу 12, укрепленную с помощьюповоротного шарнира 13 на основании14. Поворотная штанга 12 контактирует с перемещаемым объектом 15, находящимся на подвижной ленте 16.Устройство работает следующим...
Индуктивный дифференциальный датчик

Номер патента: 146958
Опубликовано: 01.01.1962
Автор: Чудов
Метки: датчик, дифференциальный, индуктивный
...на фиг. 2 - то же, рычажный вариант.Датчик имеет две катушки 1 с независимыми магнитопроводами, каждый из которых состоит из трех частей; неподвижной 2 и двух подвижных 3, связанных с разными наконечниками 4, причем при движении последних зазоры между подвижной и неподвижной частями магнитопроводов остаются постоянными, а зазор между двумя подвижными частями магнитопровода меняется, увеличиваясь в одном магнитопроводе и уменьшаясь на ту же величину в другом. При смещении детали относительно корпуса датчика без изменения размера зазоры не меняются.Наличие постоянных зазоров в магнитных цепях при малой длине и большой площади этих зазоров практически не отражается на чувствительности датчика, Благодаря малому весу подвижных частей...
Предельный инерционный датчик ускорения

Номер патента: 420935
Опубликовано: 25.03.1974
МПК: G01P 15/04
Метки: датчик, инерционный, предельный, ускорения
...которых инерционная масса прижимается к упорам при помощи тарироваццой массы. При изменении положения инерционной массы срабатывает система электрических контактов, которая сигнализирует о превышении действующим ускорением предельного значения.Известные датчики характеризуются малой надежностью в условиях ионизирующих излучений.Для повышения надежности предлагаемый датчик снабжен размещенными в корпусе двумя световодами, торцовые поверхности которых расположены рядом в опорной плоскости, при этом обращенная к торцам световодов поверхность инерционной массы выполнена отражающей.На чертеже представлена упрощенная конструкция предлагаемого датчика. световода 5, торцы которых расположены рядом в опорной плоскости корпуса.Поверхность...
Индуктивный датчик автоматической локомотивной сигнализации

Номер патента: 338429
Опубликовано: 01.01.1972
Авторы: Кирова, Харьковский
МПК: B61L 1/20
Метки: автоматической, датчик, индуктивный, локомотивной, сигнализации
...Катушки с сердечниками закреплены в рамках 3, имеющих шарнирное соединение с горизонтальной планкой 4. Пуфельдман Редакто Изд,670 Тираж 448 ПодписиТ аа 1768/ ппографин, пр, Сапунова, 2 тем поворота рамки в шарнире устанавливается заданный угол наклона оси катушки к горизонтальной прямой, после чего рамка жестко фиксируется в этом положении с помощью гайки и контргайки. Датчик прикрепляется к раме подвижной единицы при помощи вертикального стержня 5, Датчик располагается симметрично над рельсом относительно его вертикальной оси.Обмотки катушек датчика соединены последовательно,Для механической и атмосферной защиты катушки датчика помещаются в корпус из магнитонейтрального материала.При протекании переменного тока в рельсе...
Предыдущий патент: Устройство для измерения координат точек наружной поверхности гнутой трубы
Следующий патент: Интегральный тензометрический мост и способ его настройки
Случайный патент: Вентильный электродвигатель