Система дистанционного автоматизированного управления силовой установкой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
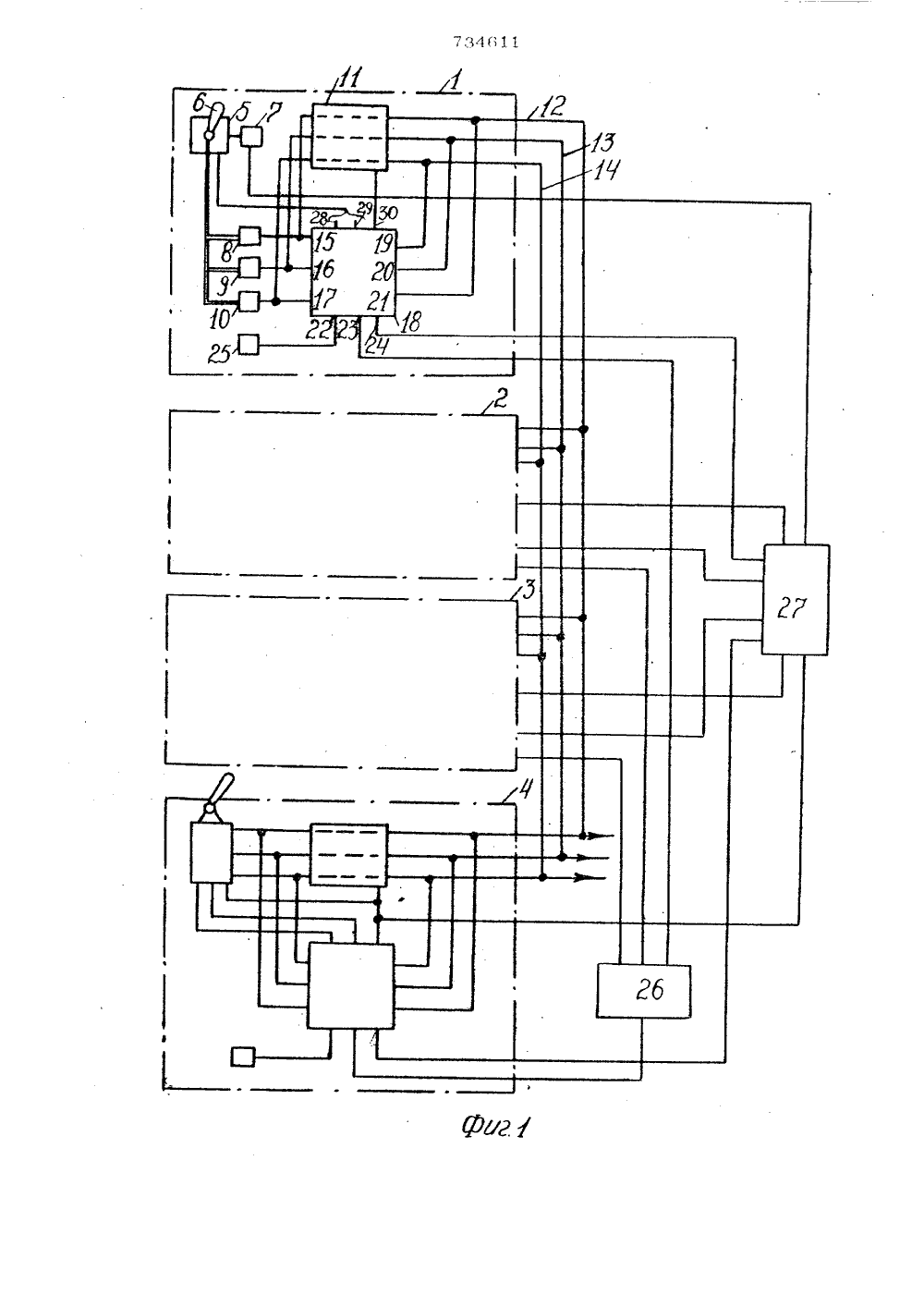
Союз СоветскинСоциалистическиеРеспублик ОП ИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 734611(23) Приоритет но делам изобретений и открытий(72) Авторы изобретения А, В, КронГерг и Н, Д, Ланип Государственный всесоюзный центральный научно-исследовательский институт комплексной автоматизапии(5) ) ОИОГВА ДИО ГАНБИОННОГО АВГОАГИЗИРОВАННОГО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ Изобретение относится к системам дистанционного автоматизированного управления (ДАУ) силовыми установками, в частности двигателями внутреннего сгорания с реверс-редукторами на судах.Системы ДАУ должны обеспечивать воз можность передачи управления с одногоблока управления (поста управления) надругой, без изменения режима работы двигателей, поэтому передача управления допускается только при согласованном зна 0чепци сигналов управления,Известны пневмомеханические системы ДАУ, в которых согласование сигналовосуществляется с помощью тросиковой ме 5ханической связи между задатчиками 1,Однако такие системы могут быть использованы при небольших расстояниях между постами и недостаточно надежны из-завытягивания тросиков.Наиболее близкой по технической сущности к предложенной системе являетсясистема ДАУ, содержащая блок коммутации, узел блокировки и блоки управления,в каждом из которых установлены два эадатчика направления вращения выходного вала и задатчик числа оборотов, выходы которых через блок клапанов соединены с каналами задания направления вращения и числа оборотов, и переключатель режима 21.Недсетатки данной системы - длительность процесса согласования, изменение режима работы агрегатов дри согласовании.Бель изобретения - расширение функциональных возможностей системы ДАУ, заключающееся в обеспечении автоматического согласования сигналов управления при передаче управления на другой пост.Поставленная цель достигается тем, что в каждом блоке управления дополнительно установлены блок согласования сигналов управления, привод, связанный с з- датчиками числа оборотов и направления вращения выходного вала и подключощый к первому и второму выходам блока согласования, и фиксатор положения приво 3 734 да, подключенный к третьему выходу блока согласования; первый измерительный вход каждого из блоков согласования соединен с выходом задатчикд числа оборотов, второй и третий измерительные входы5 соединены с выходами заддтчиков направления вращения, четвертыи, пятый и щестой измерительные входь соединены с соответствующими выходами блока клапанов, первый управляющий вход блока согласования подключен к выходу переключателя режима, второй - к соответствующему выходу блока коммутации и третий - к СООтветс твую - щему выходу узла блокировки, третий выход блока согласования подключен к бло ку клапанов и узлу блокировки, а также тем что каждый блок согласования содержит регулятор давления, переключатель, логические элементы И, ИЛИ "равнознач - нОстьяче Йки памяти нуль Орган и пре 20 образователь потенциальных сигналов в импульсные, входной канал регулятора давления соединен с первым измерительным входом блока согласования, канал задания - с четьертым измерительным входом 25 блока согласования сигналов управления, а выход регулятора - со входом переклю ,чателя, первый и второй управлвонве входы которого -оединены с и.;:;=.и;1 и щестым входами бкаа согласования, выходы перс.- ЗО ключятеля соединены с первым и вторым выходами блока согласовангл, черьые входы первого и второго логическос элем.:топ равнозначность" соединены с пятым и щестым измерительными входами блока со- а гласования, вторые входы - со вторым и третьим измерительными входами блока согласования, один из входов нуж.-органа псщключен к первому измерительному входу блока, другой -к четвертому измерительно-фО му входу;входы первого логического элемента Исоединеныс выходом нуль-органди выхот дами логических элементов "равнссзнячность", входы второго логического элемен 45 та И соевщены с первым и вторым управляющими входами блока согласования вход первой ячейки памяти соединен с выходом второго логического элемента И, д выходс управляющим входом регулятора давле-50 ния и с четвертым входом первого логического элемента И, вход второй ячейки памяти соединен с выходом первого логического элемента И, а выход - с третьим выходомблока согласования; вход пре 55 образователя готенциальных сигналов в импульсные соединен с третьим управляющим входом блока согласования, а выход - с первым входом логического элемента 611 фИЛИ, второй вход которого соединен с выходом второй ячейки памяти; выход логического элемента ИЛИ подключен к управляющему входу первой ячейки памяти, авыход преобразователя потенциальных сигналов в импульсные соединен с управляющим входом второй ячейки памяти,Иа фиг. 1 изображена структурная схема системы ДАУ; нд фиг. 2 - принципиальная схема блока согласования,Система ДАУ состоит из четырех постов 1-4 управления, (в общем случаечисло постов не ограничено) . Ид каждомпосту установлены привод 5 с рукояткой6 н фиксатором 7 положения. Привод 5и рукоятка 6 связаны с задатчиком 8числа оборотов и задатчиками 9 и 10 направления вращения выходного вала (связьна фиг. 1 условно показана двойной линией). Выходы задатчиков 8-10 через блоки 11 клапанов соединены с каналом 12задания числа оборотов и каналами 13 и14 задания направления движения, а также с первым 15, вторым 16 и третьим-,.17 измерительными входами блока 18 согласования, Четвертый 19, пятый 20 ищестой 21 измерительные входы блока 18согласования подключены к каналам 12.14, Первый 22, второй 23 и третий 24управляющие входы блока 18 соединены,соответственно, с переключателем 25 режима поста, блоком 26 коммутации и узлом 27 блокировки. Первый 28 и второй29 упраьляюшие выходы блока 18 согласования соединены с приводом 5, я тре.Тий выход 30 с фиксатором 7, блоком 11клапанов и узлом 27 блокировки.Узел 27 блокировки служит для формирования сигналов отключающих все посты,кроме включившегося последним.Связь между постами может быть вьполнена в следующих вариантах:а) один пост главны:й, остальные подчинспн:е. При этом с главного поста можно передавать управление на любой пости брать управление на себя;б) посты равнсяначны - любой постможет брать управление на себя";в) смешанный тип связи постов в соответствии с дриантдми а) и б),В системе ДАУ может быть осуществлена любая из указанных схем связи постов, что осуществляется с помощью блока 26 коммутацииБлок 18 согласования (фиг. 2) содержит регулятор 31 давления, канал задания которого соединен со входом 19, входной канал - со входом 15, д выход соединен7 34611 черед переключатель 32 с выходами 28 и 29, Входы переключателя 32 подключе ны ко входам 20 ц 21, к которым также ПОДКЛЮЧЕНЫ ПЕРВЫЕ ВХОДЫ ЛОГИЧОСКИХ эдемецтов 33 и 34 "равнодна ьност. Вторые входы этих элементов соепшены со входами 16 и 17, один вход цул -органа 35 соединен со входом 15, второй вход - со входом 19, а выход - со входом элемента И 36, к которому также подключены вы- О ходы элементов 33 и 34 и ячейки памяти 37. К ячейке памяти 37 подключен элемент И 38, входы которого соединены со входами 22 и 23. Выход ячейки памяти 37 соединен также с управляющим входом регулятора. Выход элемента И 36 через ячейку памяти 39 соединен с выходом 30 и со входом элемента ИЛИ 40. Вход 24 через преобразователь 41 потенциальных сигналов в импульсные соединен 20 с управляющими входами ячеек памяти 39 и 37 (через элемент ИЛИ 40).Система работает следующим образом.Пусть в исходном положении включен пост 1. Сигналы от задатчиков 8, 9 и 10 25 числа оборотов и направления вращения, которые определяются положением рукоятки 6 этого поста, проходят через блок 11 клапанов в каналы 12, 13 и 14 и далее поступают к агрегату (на фиг. 1 не по- ЗО казан) . Сигнал с выхода 30 блока 18 согласования обеспечивает открытие клапанов блока 11 поста 1; этот же сигнал поступает к ячейке памяти 39, в которой формируются отключающие сигналы, пода ваемые на входы 24 блоков 18 согласования постов 2, 3 и 4, благодаря чему обеспечивается закрытие блоков 11 клакомм чтации,знрованного управления силовой установкой, содержащая блок коммутации, узелблокировки и блоки управления, в каждомид которых установлены два задатчика направления вращения выходного вала и задатчик числа оборотов, выходы которыхчеред блок клапаноь соединены с каналами задания направления вращения и числаоборотов, и переключатель режима, о т -л и ч а ю щ а я с я тем, что, с цельюрасширения функциональных возможностей,в каждом блоке управления дополнительноустановлены блок согласования сигналовуправления, привод, связанный с задатчиками числа оборотов и направления вращения выходного вала и подкгцоченпый к первому и второму выходам блока согласования,и фиксатор положения привода, подключенныйк третьему выходу блока согласования;первый измерцтельный вход каждого идблоков согласования соединен с выходомзадатчика числа оборотов, второй и третийизмерительные входы соеипены с выходдами задатчикоь направления вращения,четвертый, пятый и шестой измерительныевходы соединены с соответствующими выходами блока клапанов, первый управляющий вход блока согласования подключен квыходу переключателя режима, второй - ксоответствующему выходу блока коммутации и третий - к соответствующему выходу узла блокировки, третий выход блокасогласования подкгцочен к блоку клапанови узлу блокировки,2. Система по и. 1, о т л и ч а юш а я с я тем, что, с целью пои гшения панов этнх ПОСТОВ 4 О1 ередача управления начинается по команде от переключателя 25 к посту, ксторь 1 й принимает управление, Сигнал отпереключателя 25 поступает на вход 22блока 1 8 согласования 1 8,45Выходной сигнал элемента И 38 запоминается ячейкой памяти 37 и поступаетна управляющий вход регулятора 31 давления и на вход элемента И 36; выходключенного регулятора 31 давления черезпереключатель 32 - в одну из полостейпривода 5. Подача сигнала на выход 28или 29, определяющая направление движения привода 5, определяется сигналами вканалах 13 и 1 4,При работе регулятора 31 давления ипривода 5 рукоятка б перемешается до положения, при котором выходной сигнал задатчика 8 числа оборотов 8 станет равным сигналу в канале 12, В этот момент срабатывает нуль-орган 35 и элемент И 36, выходной сигнал которого через ячейку памяти 39 и выход 30, поступает к фи.ксаторэ, ", и останавливает движение привода гОдновременно выходной сигнал ячейки памяти 39 поступает ца отключение ячейки памяти 37, в результате чего отключится регуля ор 31 давления. 1 а этом процесс согласования сигналов заканчивается. Пост, передавший управление, отключается сигналом, поступающим на вход 23 от блока 26 Технико-эконолическцй эффект при внед. ренин изобретения определяется повышением маневренности судна за счет сокращения времени передачи управления,Формула изобретения 1. Система дистанционного автомати 734611быстродействия процесса согласования, каждый блок согласования содержит регулятор давления, пероключа гель, логические элементы И, 1 И "равно иачность", ячейки памяти, нул-орган и преобразователь потенциальиьи сигналов В импульсные, входной канал регулятора давления соединен с первым измерительным ьходом блока согласования, канал задания - с четвертым измерительным входом блока согласования сигналов управления, а выход регулятора - со зходсм перек 1 цочателя, первый и второй управляющие входы которого сом единены с пятым и шестым входами блока согласования, выходы переключателя соединены с первым и вторым выходами блока согласования, первые входы первого и второго логических элементов "равнозначность" соединены с пятым и шестым измерительными входами блока согласования, вторые входы - оо вторым и третьим измерительными входами блока согласования, один из входов нуль-органа подключен к первому измерительному входу блока, другой к четвертому измерителыому входу; входы первого логического элемента И соединены с выходом нуль-органа и выходами логических элементов фравнозиач" ностьф, входы второго логического элемента И соединены с первым и вторым управляющим входами блока согласования, вход первой ячейки памяти соеашен с выходом второго логического элемента И, а выходс управляющим входом регулятора давления 5 и с четвертым входом первого логическогоэлемента И, вход второй ячейки памяти соединен с выходом первого логического элемента И, а выход - с третьим выходом блока согласования; вход преобразователя ипотенциальных сигналов в импульсные со"одинен с третьим управляющим входом блока согласования, а выход - с первым входом логического элемента ИЛИ,второй вход которого соединен с выходом второй ячейки памяти;выход логического элемента ИЛИ подключен к управляющему входу первойг ячейки памяти, а выход преобразователя потенциальных сигналов в импульсные соединен с управляющим входом второй 20 ячейки памяти,Источники информации,принятые во внимание при экспертизе1, Осипов Л, Л. Системы дистанционного управления главными судовыми механизмами. М., 1964, с. 121-12 Я.2, Гогин А, Ф., Чаплыгин И. Б, конст рукция систем дистанционного управления главными двигателями речных теплохоцов. М., 1968, с. 134-139 (прототип).9 Тчраж 9561 ШИИГ 1 И Государственногопо делам изобретений и11 303 5, М осква, Ж5 шинорректор Ю, Макаренко Подписноекомитета СССРоткрытийРаушская набд, 4 ут 5
СмотретьЗаявка
1765467, 31.03.1972
ГОСУДАРСТВЕННЫЙ ВСЕСОЮЗНЫЙ ЦЕНТРАЛЬНЫЙ НАУЧНО ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ КОМПЛЕКСНОЙ АВТОМАТИЗАЦИИ
КРОНБЕРГ АЛЕКСАНДР ВАДИМОВИЧ, ЛАНИН НАТАН ДАВЫДОВИЧ
МПК / Метки
МПК: G05B 11/32
Метки: автоматизированного, дистанционного, силовой, установкой
Опубликовано: 15.05.1980
Код ссылки
<a href="https://patents.su/6-734611-sistema-distancionnogo-avtomatizirovannogo-upravleniya-silovojj-ustanovkojj.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного автоматизированного управления силовой установкой</a>
Устройство для регенерации информации в блоке памяти

Номер патента: 951389
Опубликовано: 15.08.1982
МПК: G11C 11/406
Метки: блоке, информации, памяти, регенерации
...9 фОбращение к ОЗУ между циклами регенерации производится путем подачикода адреса на входы мультиплексора 1и подачи сигнала "Обращение к. памяти"на управляющий вход устройства. Приэтом мультиплексор 1 разрешает прохождение кода внешнего адреса от ЭВМна адресные входы ОЗУ, а на запре"щающем входе формирователя 4 отсутствует сигнал запрета обращений и внеш"ний сигнал "Обращение к памяти" пропускается формирователем 4 на выходустройства,По истечении времени хранения информации в ОЗУ блок 3 вырабатываеттактовые 1 сигналы, которые поступаютна вход счетчика 2, и сигнал запретаобращений, который поступает на запрещающий вход формирователя 4, Приэтом счетчик 2 выдает последовательно коды адреса регенерации на входымультиплексора 1, который...
Устройство для контроля блоков памяти

Номер патента: 1569904
Опубликовано: 07.06.1990
Авторы: Август, Зыков, Иванюк, Куклов, Никитин
МПК: G11C 29/00
...обращения, в первый регистр 16 адреса и первый .регистр 17 данных, откуда через соответствующие блоки вывода поступают на контролируемый блок памяти; если микрокоманда в первом такте содержит команду БП или ВнП, соответственно с выходов 24 или 27 блока 5 управления вырабатываются сигналы занесения, по которым изменяется содержимое регистров адреса микрокоманд или счетчика повторений;Т 2 - содержимое первых регистров адреса 16 и данных 17 заносится во вторые регистры адреса 11 и данных 13; микрокоманда с второго блока 3 памяти через мультиплексор 6 заносится в регистр Я микрокоманд; если микрокоманда содержит коды управления ТЛБ первого или второго, происходит соответствующая модиФикация полей микрокоманды с содержимым второго регистра 11...
Устройство для контроля блоков памяти

Номер патента: 1631608
Опубликовано: 28.02.1991
Авторы: Баранов, Коновалов, Уваров
МПК: G11C 29/00
...за время контроля от точки О. При выполнении операции сложения происходит движение Овправо по лучу, а при45 50 выполнении операции вычитания - влево. Пусть к 1-му моменту суммарный вес 6 находится в точке 6 . Если в 1-й момент на вход сумматора пришел вес 4, то при сложении 6 и Ь суммарный вес 6 ; переходит в точку 62)11. Ввиду ограниченности разрядной сетки регистра 8 суммарный вес 6 ; не может принимать значение, большее 6;накс = 2" - 1, где п - разрядность регистра 8, поэтому значения 6 принадлежат ограниченному отрезку на луче. Если к )-му моменту суммарный вес достигает 6 , то при сложении 6; и Ь формируемый суммарный вес может превысить 6 цакс, определяемый разрядностью регистра 8, при этом вырабатывается сигнал...
Устройство для обнаружения ошибок в блоках памяти программ

Номер патента: 1709395
Опубликовано: 30.01.1992
Авторы: Качанко, Сигалов, Фараджев
МПК: G11C 29/00
Метки: блоках, обнаружения, ошибок, памяти, программ
...из "0" В "1" триггера 111 одна-ВИЛрэтор 14 формирует падокитедьный импу.",ьс, который прибавляет:"116 и через элемент И,11 И 19 поступает нэ Вход ээписи блока 2 пэмЯти. В блоке 2 памяти по адресу считывания записывается 5 10 20 25 30 5 40 45 единичное значение с триггера 10. Если пралсходит обращение к ячейке памяти, к которой уже обращались, то содержимое соответствующего адреса блока 2 памяти равно единице, Следовательно, на выходе сумматора 15 присутствует нулевой потенциал и содержимое данного адреса повторно не накапливается в сумматоре 4, Кроме того, в счетчике 16 не учитыва 1 атся многократные обращения к одним и тем же адресам, счетчик 16 считает только первое абрэщен 1 ле по каждому иэ адресов, Пасде того, как было обращение...
Устройство для коррекции ошибок в блоках памяти

Номер патента: 1073798
Опубликовано: 15.02.1984
МПК: G11C 29/00
Метки: блоках, коррекции, ошибок, памяти
...затраты, определенные необходимостью мультиплексирования данных, необходимостью коррекциине только данных, но и контрольныхразрядов и наличием ряда инверторовдля согласования по фазе входных ивыходных данных.Цель изобретения - экономияоборудования и повышение быстродействия устройства,Поставленная цель достигаетсятем, что в устройство для коррекции 65 ошибок, в блоках памяти, содержащеепервый регистр, выход которого подключен к первому входу генераторасиндромов и первому входу корректораданных, выход которого являетсявыходом устройства, второй регистр,выход которого подключен к второмувходу генератора синдромов, третийвход которого подключен к накопителюсиндромон, входы первого и второго;регистров являются соответственновходами...
Предыдущий патент: Следящая система
Следующий патент: Устройство для формирования сигнала управления
Случайный патент: Кассета для электротренировки радиоэлементов