Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
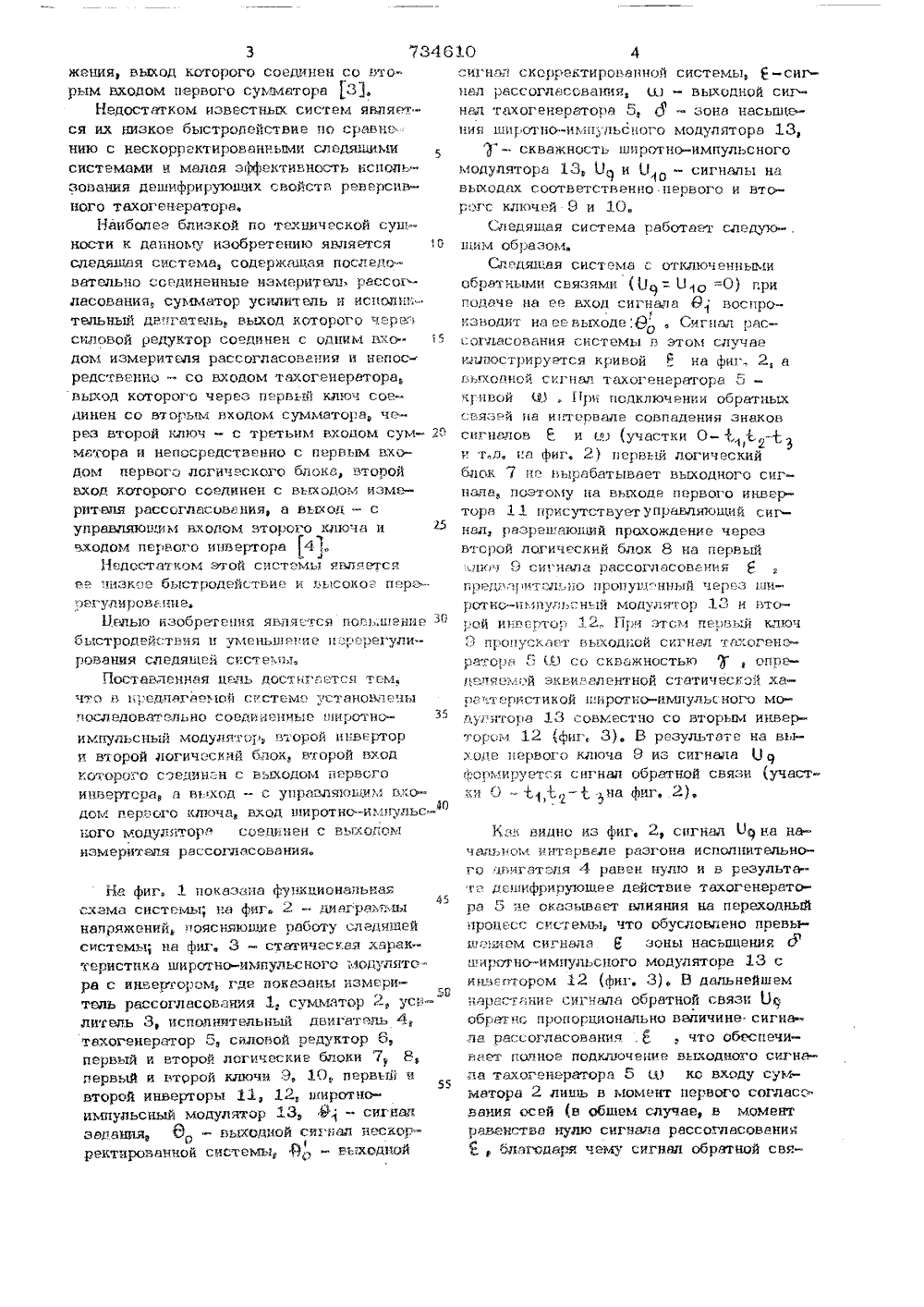
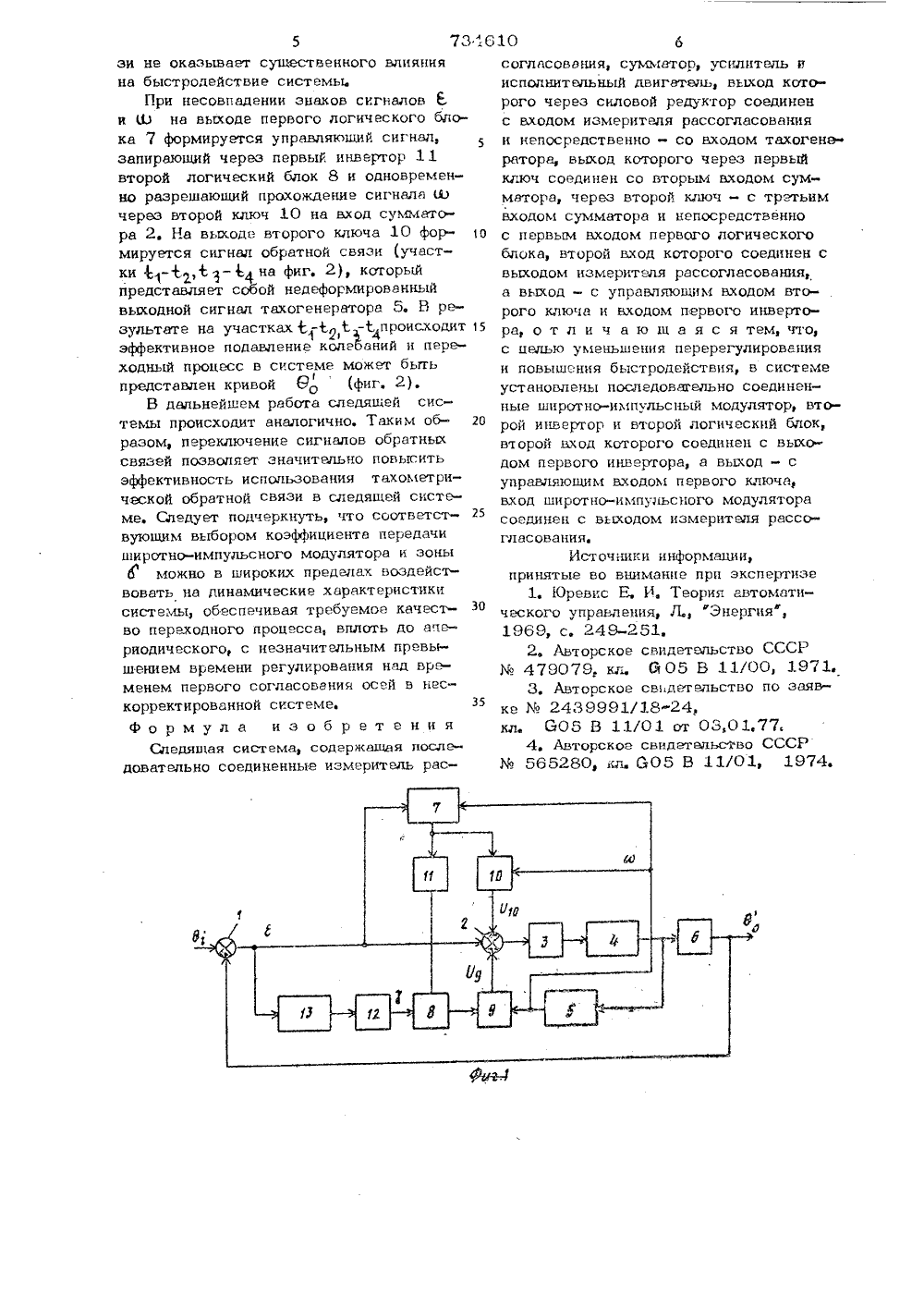
(23)Приоритет По делан изобретений и открытий(71) Заявитель Рязанский радиотехнический институт(54) СЛЕДЯЩАЯ СИСТЕМА Изобретение относится к области автоматического регулирования и может найти применение для управления обьектами широкого профиля.Известны следящие системы широкого профиля, повышение точности и быст 5 родействия которых достигается за счет переключения двух корректирующих устройствИзвестна также следящая система,10 содержащая последовательно соединенные измеритель рассогласования, усилитель, сумматор, исполнительный механизм, выход которого соединен с одним Входом измерителя рассогласования и входом тахогенератора, выход которого через первый функциональный преобразователь соединен со вторым входом сумматора, через второй функциональный преобразователь - с одним из входов компаратора, Второй вход которого соединен с вы: - ходом измерителя рассогласования и входом первого порогового устройства, а выход - через первый логический блок со вторым входом первого функционального преобразователя, третий Вход которого через второй логический блок соединен с выходом первого порогового устройства и вторым входом первого логического блока, второй вход второго логического блока через второе пороговое устройство соединен с выходом тахогенератора, а третий Вход через третий логический блок - с выходом компаратор 121Известна следящая система, содержащая последорательно соединенные измеритель рассогласования, первый сумматор, усилитель, второй сумматор, функциональный преобразовате.ть и исполнительный механизм, Выход которого соединен с одним из входов измерителя рассогласования, выход функционального преобразователа через первое корректирующее уст- ройстВО соединен с Однкъ. Из Входов Вто рого сумматора, а через второе корректирующее устройство и нелинейный блок - с соответствуюшими Входами блока умно ЖЕНИЯ ВЫХОД КОТороГО СОЕДИНЕН СО ВХО- рым входом первого сумматора 3.Недостатком известных систем является их низкое быстродействие по сравне нию с нескорректировенными следяшими системами и малая эффективность использования дешифрируюших свойств реверсивного тахогенератора.Наиболее бдизкой по технической суш=. ности к денному изобретению является 10 следятцея системе, содериатцая последовательно соединенные измеритель рессог десования., сумматор усилитедь и испопнктедьньй дв.Гетель Выход которОГО через силовой редуктор соединен с Одним Вх 15 дом измерителя рессогласовения и непосредственно - со входом техогенеретора, выход которого через первый ключ соединен со вторым входом сумматора, через второй ключ - с третьим Входом сум О метора и непосредственно с первым Входом первого логического бдока, второй вход которого соединен с выходом измерителя рассогдассвения, а выход - с упревдяюцим вхолом второго ключа ищ входом первого инвертореНедостатком этой системы является ее пнзксе быстродействие и вь 1 сокое пер"регулирование,Илью изобретения явпястся поь,шение " СЫСтрсдй;.ТВИИ и МЕЯ ШЕЕ Г оОГуИ ровения сдедяшей сксте.ь.Поставленная цель достигается тем что педлагаев щй системе тсеансдегы ПССЛЕЛОВРГЮ 2 ЬНО СОЕДИНЕННЫЕ ШИРОТНО импульсный моду лят О Вт срсй и 1 В е ртор и второй логический блок, второй вход КОТОВОГО СЗЕЛЛНЕН С ВЫХОДОМ ПЕРВОГО инвертора, а выход - с упраляюцик ходом первого ключе, вход широтно - имульс 30 ного модулятор соединен с выходом измеритепя рассогласования. Не фиг. 1 показана функционепьная схеме системы, "не фиг 2 - диаграк",мы напряжений, поясняющие работу следяшей системы, не фиг, 3 - статичскея хер ктеристика широтно-импульсного модудятсра с инверторсм, где покезены измеритель рассогласования 1, сумматор 2, усилитель 3, испопнитедьный двигатель 4, техогенеретор 5, садовой редуктор б первый и второй логические блоки 7 8, первый и втррсй ключи 9, 10, первый и51 второй инверторы 11, 12, широтноимпудьсный модулятор 13, 9 - сигнал зеденияр ВО вьясднсй ситчач нескор ректихьэаннои системыу 07 одной 1 Осигнал скорректироанной системы, -сиг- НЕЛ РЕССОГДЯСОВЕНИЯ ОЛ ВЫХОДНой СИГ нел тахогенереторе 5, Д - зоне несьшк- ния широтно-имп пьсного модуляторе 13,) - сквакность широтно-импульсного молудяторе 13, О-и О - сигналы неовыходах соответственно первого и втс- роге клк)чей 9 и 10..леляшея система работает следую-. шим Обрезом.Сделяжея система с откдюченными обратными связями (О,) 01 О =О) при подаче на ее вход сигнале 61 воспроизводит на ее выходе,8, Сигнал расо.Огдесования системы зтсм случае юлюстрируется кривой. на фиг. 2, а выхсенсй сигнал тахогенераторе 5 - кривой ОЗ . При подключении обратных связей пе иктервале совпадения знаков сигналов е и е. (участки О-Ь- и т,д. Па фиг, 2) первый логический блок 7 пе ыребатывеет выходного сигнале, поэтому на выходе первого инвертсра 1 1 присутствуетуправдяющий сигнал, резрешаюший прохождение через второй логический блок 8 на первый .Пкч Э СИ 1 нале рассоглесовенияпредзрительно пропуш".Нный через ширстнс-икп 1 ульсный модулятор 13 и тсрой инвертор 12. При этсм первый ключпропускет выходной с кг над т ахоген + РЕТОРа Ю СО СКВОМНОСТЬЮОПРЕ лепиксй зквиеаденчной статической харетеристиксй широтно-импульс ного модуляторе 13 совместно со вторым инвертсрсм 12 (фиг, 3). В результате на выходе первого ключе 8 из сиГнала О формируется сигнал обратной связи (участО - . , т, - .на фиг. 2). Как видно из фиг, 2, сигнед Ю не начальном интервале разгоне исполнительного лвигетзля 4 равен нулю и в результате лешифрируюшее действие техогенеретс ра 5 не оказывает влияния на переходный процесс системы, что обусловлено превышеягем сигнала 0 зоны насьпцения д цирОТНО "импульсцОГО модуляторе 13 с инвепторсм 12 (фиг. 3). В дальнейшем нерсес.кение сигнала обратной связи О обрат нс пропорционально величине сигнале. рассогласования . , чтО Обеспечивает полное подключение выходного сигнала тахсгенератора 5 и) кс Входу сумматоре 2 дишь в момент первого согдас- вания Осей (В Общем случае, в момент равенстве нулю сиГнале рессОГлесОВения Е, благодаря чему сигнал обратной свя=610 5 78" зи не оказывает сушественного влияния на быстродействие системы.При несовпадении знаков сигналов б, и Ю на выходе первого логического блока 7 формируется управляюший сигнал, запирающий через первый инвертор 1 1 второй логический блок 8 и одновременно разрешаюший прохождение сигнвла Оэ через второй ключ 10 на вход сумматора 2. На выходе второго ключа 10 фор о мируется сигнал обратной связи участки -тт- 4 на фиг. 2), который представляет собой недеформироввнный выходной сигнал тахогенератора 5. В результате на участках .;-Ь. г, -г. происходит 151эффективное подавление колебайий и переходный процесс в системе может бьггь представлен кривой 6(фиг. 2).В дальнейшем работа следящей системы происходит аналогично, Таким Об разом, переключение сигналов обратных связей позволяет значительно повысить эффективность использования тахометрической обратной связи в следящей системе. Следует подчеркнуть, что соответст вукнцим выбором коэффициенте передачи широтно-импульсного модулятора и зоны 6 можно в широких пределах воздейст вовать на динамические характеристики системы, обеспечивая требуеллое качест- ЗО во переходного процесса, вплоть до апериодического с незначительным превышением времени регулирования нвд вре.- менем первого согласования осей в нескорректированной системе.35 Формула изобретенияСпедяшая система, содержвшвя последовательно соединенные измеритедь рассогласования, сумматор, усилитель иисполнительный двигатель, выход которого через силовой редуктор соединенс входом измерителя рассогласованияи непосредственно - со входом тахогенаратора, выход которого через первыйключ соединен со вторым входом сумматора, через второй ключ - с третьимвходом сумматора и непосредственнос первым входол 1 первого логическогоблока, второй вход которого соединен свыходом измерителя рассогласования,а выход - с управляющим входом второго ключа и входом первого инвертора, о т л и ч а ю ш а я с я тем, что,с целью уменьшения перерегулированияи повышения быстродействия, в системеустановлены последоввгельно соединенные широтно-импульсный модулятор, второй инвертор и второй логический блок,второй вход которого соединен с вьгходом первого инвертора, а выход - суправляюшим входом первого ключа,вход широтно-импульсного модуляторасоединен с выходом измерителя рассогласованияя.Источники информации,принятые во внимание при экспертизе1, Юревис Е, И. Теория автоматического управления, Л., "Энергия,1969 а са 24 9-2 51 а2. Авторское свидетельство СССРМ 479079 а кла 6 05 В 1 1/00 а 197 1 а3, Авторское си детельство по заявке Л 2489991/18 24,кл. 805 В 11/01 от 0801.77.4, Авторское свидетельство СССРМо 565280, кла 605 В 11/01, 1974,1 ю дактор 2160/51 БНИИПИ ж 956 Подписноеого комитета СССРобретений и открьггийЖ 35, Раушская наб., д. ТираГосударствен по делам иэ 13035, Москва,П "Патент", г, Ужгород, ул. Проектная Составитель Ю, Гладковенская ТехредС.Мигай Корректор Т. Скворцова
СмотретьЗаявка
2539936, 01.11.1977
РЯЗАНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
БЕРЗИН БОРИС ПЕТРОВИЧ, ЗУБОВ МИХАИЛ АНТОНОВИЧ, КУЛИЧЕНКО ТАТЬЯНА АЛЕКСАНДРОВНА, НИКУЛИН ВИКТОР БОРИСОВИЧ
МПК / Метки
МПК: G05B 11/28
Метки: следящая
Опубликовано: 15.05.1980
Код ссылки
<a href="https://patents.su/4-734610-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Устройство для приоритетного обслуживания сообщений

Номер патента: 636610
Опубликовано: 05.12.1978
Авторы: Дульцев, Максимов, Мохнобров, Фролов
МПК: G06F 9/50
Метки: обслуживания, приоритетного, сообщений
...происходит анали состветственно и управляющие входы 31 ния соответствующих разрядов региствходных накопителе , запрей апрещающий и за- ра 8. Через блок 6 содержимое анали 9пускающий входы ф32 33 блока опроса, 85 эируемого разряда поступает в блок636610 Устройство для приоритетного обслуживания сообщений, содержащее входные накопители, первые вторые, третьи приоритетные выходы которых через первый, второй, третий блоки элементов ИЛИ соответственно соединены с первыми входами соответственно первого, второго, третьего элементов ИЛИ, блок опроса, запрещающий вход которого через четвертый блок элементов ИЛИ соединен с индикационными выходами входных накопителей, регистр,55 60 65 управления, а сигналы наличия высоких приоритетоз запоминаются...
Устройство для оценки качества канала связи

Номер патента: 720742
Опубликовано: 05.03.1980
Авторы: Бобровский, Бычков, Шувалов
МПК: H04B 3/46
Метки: канала, качества, оценки, связи
...состоянию канала, предварительно оцененным декодером (на чертеже не показан), поступают на счетчик3. Если за время анализа, равное длительности одной кодовой комбинации,число сигналов Стирание меньше 40числа, определяющего оценку Преду- .преждение, то на первомвыходесчетчика 3 выдается сигнал Норма,который поступает в реверсивные счет-чики 10 и 8, где сраВниваетСя с количеством оценок Предупреждение 1 иАвария, поступающих с второго итретьего выходов счетчика 3 соответственно. Если число сигналов Стирание, поступивших в счетчик 3,равно или больше числа, определяющегооценку 1 Предупреждение, но меньшечисла, определяющего оценкуАвария",в концецикла измерения; равноо временИ измерения одной кодовой комбинации, выдается сигналПредупрежде.,...
Устройство для вычисления функции вида
Номер патента: 765803
Опубликовано: 23.09.1980
Автор: Борисова
МПК: G06F 7/38
Метки: вида, вычисления, функции
...-1.тактирования. Сумматор выполнен на потенциальных полусумматорах, поэтому непосредственно после подключения к нему укаэанных значений чиаел на его выходах устанавливается код чис-. ла 2."Е х,х который по сигналу с блока управления 2 записывается в промежуточный регистр 18.После этого к сумматору 17 блоком управления 2 через коммутатор 16 подключаются выходы промежуточного регистра 18 и регистра квадрата суммы 20. Блок управления 2 выдает х сигналов на вход записи регистра квадрата суммы (результата) 20 для занесения в последний результат суммирования, после чего в регистре 20 образуется число, равное квадрату суммычисла 1. Содержимое сумматора заносится в регистр суммы 19 по команде с блока управления. На этом обработка значения х...
Генератор псевдослучайных последовательностей
Номер патента: 877533
Опубликовано: 30.10.1981
Автор: Кизуб
МПК: G06F 7/58
Метки: генератор, последовательностей, псевдослучайных«
...элемента И 12, Первые входы элементов И 9, 12,13 объединены и подключены к входу автоматического запуска 20 устройства,Вход 21 пошагового запуска устройства соединен с первым входом первогоэлемента ИЛИ 22, второй и третийвходы которого подключены к выходамэлементов И 9 и 12 соответственнаа выход элемента ИЛИ 22 через Формирователь импульсов 23 подключен кпервому входу элемента И 14, второйвход которого соединен с выходомвторого элемента ИЛИ 24. Первый ивторой входы элемента ИЛИ 24 подключены к выходам элементов И 8 и 11соответственно. Первый вход элементаИ 11 объединен со вторым входом управ"ляемого далителя 17 и подключен к48выходу генератора 25 тактовыхимпульсов, Входы "Сброс" счетчиков 7 и 13,а также вход "Начальная...
Блок оптической выборки информации для ассоциативного оптического запоминающего устройства
Номер патента: 900728
Опубликовано: 20.01.1996
Автор: Вербовецкий
МПК: G11C 11/42
Метки: ассоциативного, блок, выборки, запоминающего, информации, оптического, оптической, устройства
1. БЛОК ОПТИЧЕСКОЙ ВЫБОРКИ ИНФОРМАЦИИ ДЛЯ АССОЦИАТИВНОГО ОПТИЧЕСКОГО ЗАПОМИНАЮЩЕГО УСТРОЙСТВА, содержащий узел инвертирования, оптический выход которого связан с входом первого проекционного узла, последовательно расположенные и оптически связанные второй проекционный узел, узел дешифрации, третий проекционный узел и первый фотоприемный узел, блок управления, содержащий генератор синхроимпульсов, первый, второй и третий выходы которого через первый, второй и третий формирователи упавляющих сигналов подключены соответственно к узлу оптического инвертирования, узлу дешифрации и входу первого фотоприемного узла, четвертый выход генератора синхроимпульсов связан с первым входом регистра, к второму входу которого подключен выход первого...
Предыдущий патент: Устройство для позиционирования пневмопривода
Следующий патент: Система дистанционного автоматизированного управления силовой установкой
Случайный патент: Устройство для вычисления разности квадратов двух чисел