Способ идентификации поездов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
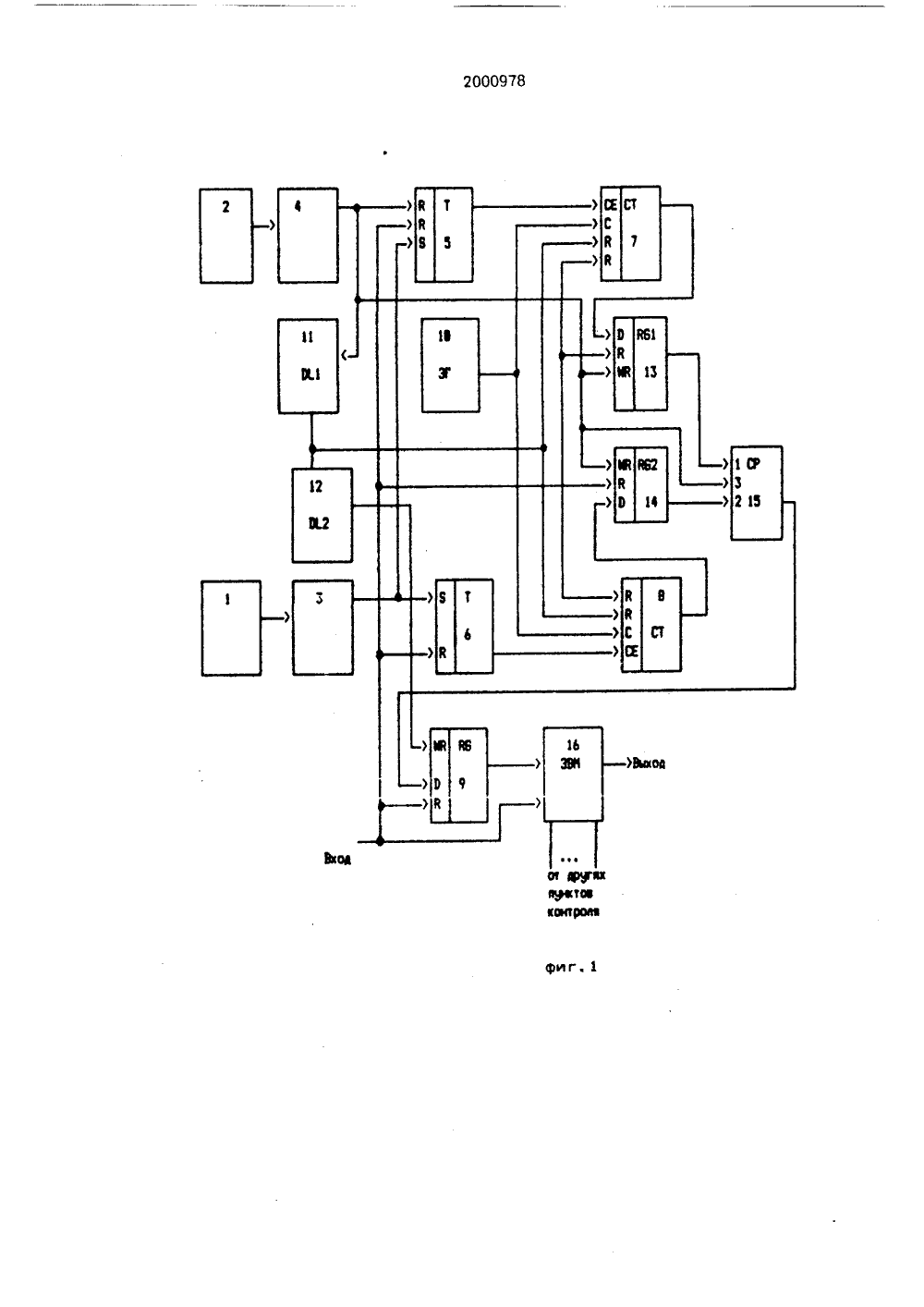
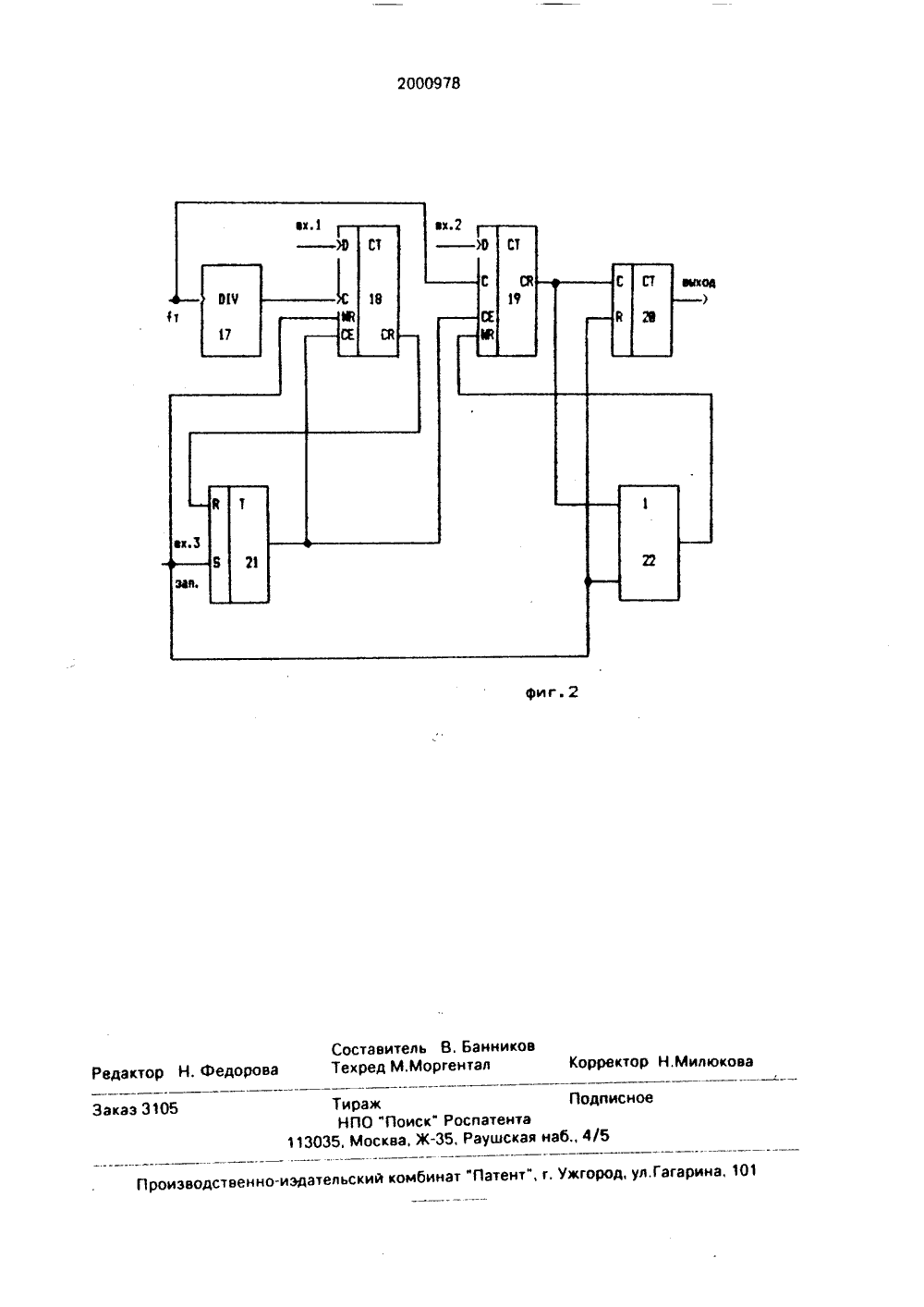
Кемитет Рессийскей Федерации не патентам и теварным знакам ЗОБРЕТЕН(М) ОЮСОБ ИДЕНТИФИКАЦИИ ПОЕЗД О О О ОО ОПИ САНИК ПАТЕНТУ(57) Использование. для идентификации поездов. Сущность изобретения: аюсоб заключается в том, что при наличии на участке контроля нескольких поездов с одинаковым количеством осей и подвижных единиц дополнительно измеряют межосные расстояния, формируют и запоминают последовательности межосных расстояний, при совпадении последовательностей формируют сигнал опознания поезда 1 зл ф-лы, 2 илИзобретение относится к железнодорожному транспорту и может быть использовано в централизованных системахавтоматического контроля подвижного состава,Известен способ идентификации поездов, основанный на считывании номера лоюейбтива. с последующей передачей его нацентральный пункт контроля при прохождении поезда через каждый участок контроля,оборудованный устройством считывания.Недостаток такого способа заключается всложности его реализации, т.к, требует оснащения сложной аппаратурой каждогопункта контроля и всего парка локомотивов. 5 10 15 Наиболее близким по технической сущности является способ. заключающийся вподсчете числа осей и количества вагонов(подвижных единиц) в каждом поезде, преследовавшем один иэ контрольных пунктов,передаче на центральный пункт, запоминании этих величин и сравнении их с числомосей подвижных единиц в поезде, проследовавшем другой контрольный пункт, Сигнал опознания поезда формируют присовпадении числа осей и количества вагонов.Недостаток такого способа заключаетсяв снижении достоверности идентификации З 0при интенсивном движении поездов, когдачисло осей и количество вагонов может бытьодинаковым в нескольких поездах.Целью изобретения является повышение достоверности идентификации поездов З 5(снижение вероятности неоднозначностиопознания поезда),Это достигается тем, что для опознанияпоезда одновременно с определениемчисла осей и подвижных единиц дополнительно измеряют межосные расстояния,формируют и запоминают последовательность межосных расстояний поездов, проследовавших первый и второй контрольныепункты, после фиксации равенства числа 45осей и подвижных единиц в этих поездахфиксируют наличие других поездов с равным количеством осей и подвижных единици сравнивают каждое значение межосногорасстояния поезда, проследовавшего второй контрольный пункт, с соответствующимзначением межосного расстояния каждогопоезда, проследовавшего второй контрольный пункт, и сигнал опоздания поезда формирует в случае равенства всех значений 55соответствующих межосных расстояний.Поскольку существует большое разнообразие вагонов с разными межосными расстояниями и при одинаковрм числе осей иколичестве вагонов в поезде последовательности межосных расстояний является весьма информативным параметром. Использование этой информации для опознания поезда позволяет повысить достоверность идентификации поездов, Для измерения межосных расстояний раэмешают на путях два датчика прохода осей (колес) на расстоянии друг от друга, меньшем минимально возможного расстояния между соседними осями, измеряют интервал времени прохода каждой оси между датчиками, измеряют время прохождения соседних осей над одной точкой и по известному расстоянию между датчиками вычисляют межосные расстояния,Сопоставительный анализ предлагаемого способа с прототипом показывает, что способ отличается от известного тем, что для опознания поезда дополнительно измеряют межосные расстояния, формируют и запоминают последовательности измеренных значений в поездах, проследовавших первый и второй пункты контроля, и сравнивают их между собой при наличии двух и более поездов с равным числом осей и подвижных единиц. Таким образом, заявляемый способ соответствует критерию "оизна",Сравнение заявляемого решения с другими техническими решениями в данной области не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "существенные отличия",Предлагаемый способ идентификации поездов может быть реализован следующим образом,На путях (например, путем закрепления на одном иэ рельсов) размещают два датчика (индуктивных, тенэометрических и т.д.), реагирующих на прохождение над ними колеса подвижной единицы. Сигналы датчиков преобразуют в электрические импульсы и фиксируют их временное положение (например, по переходу через нуль выходного напряжения индуктивного датчика или по максимуму нагрузки на тензодатчик). Затем измеряют временной интервал между сигналами двух датчиков при проходе колеса и интервал времени прохода каждой соседней пары осей над одним иэ датчиков, по известной расстоянию между датчиками определяют данное межосное расстоянией - задержка сигнала (1+1)-го колесаотносительно 1-го при проходе одного издатчиков;19 - задержка сигнала второго датчикаотносительно первого при проходе 1-го колеса,По измеренным на каждом контрольном пункте межосным расстояниям формируют последовательность для каждогопоезда в порядке следования осей всех вагонов (подвижных единиц), запоминают их.и при наличии на участке централизованного контроля нескольких поездов с одинаковым количеством осей и вагонов принимаютрешение об идентификации поезда при совпадении последовательностей межосныхрасстояний с учетом погрешности измерения межосных расстояний,Осуществление способа поясняется спомощью устройства, представленного нафиг.1. На фиг.2 приведена функциональнаясхема вычислителя.Устройство содержит первый 1 и второй2 датчики прохода колес (например, индуктивные, тензорезисторные и т.р,), первый 3и второй 4 преобразователи сигналов датчиков в импульсы логического вида(например,последовательно соединенных усилитель икомпаратор), формирователь 5 временногоинтервала 19(ЯЯ - триггер), формировательб временного интервала Ф (счетный триггерс предустановкой), счетчики 7, 8, первыйрегистр 9 памяти, генератор 10 эталонныхимпульсов, элементы 11, 12 задержки. второй и третий регистры 13, 14, вычислитель15 и ЭВМ 16.Задержка сигнала в элементе 11 задержки превышает время переписи информации из счетчиков 7, 8 в регистры 13, 14, азадержка в элементе 12 - время вычислениямежосного расстояния в вычислителе 15.Вычислитель 15(фиг.2) и содержит делитель 17 частоты, вычитающие счетчики 18,19, суммирующий счетчик 20, триггер 21 иэлемент ИЛИ 22.Устройство работает следующим образом,В исходном состоянии триггеры 5, б,счетчики 7, 8, регистры 9, 13, 14 обнулены,счет запрещен, При проходе первого колесанад датчиком 1 на выходе преобразователя3 формируется импульс, переводящий триггер 5 в состояние, разрешающее счетчику 7счет импульсов генератора 10, Импульс свыхода преобразователя 3 переводит такжетриггер 6 в состояние, разрешающее счетсчетчиком 8 импульсов генератора 10, Припроходе этого же колеса над датчиком 2формируется импульс на выходе преобразователя 4, опрокидывая триггер 5 и запрещая 5 10 15 20 25 30 35 40 45 50 55 счет счетчика 7. Одновременно импул г формирования 4 разрешает перепись кода с выхода счетчиков 7, 8 в регистры 13, 14 соответственно, а через элементы задержки обнуляет счетчики 7, 8, При проходе второго колеса над датчиком 1 триггер 5 снова разрешает счет счетчиком 7, а при проходе над датчиком 2 счет прекращается, Импульсом, сформированным преобразователем 3 при проходе второго колеса над датчиком 2, состояние триггера 6 подтверждается, а его код каждым импульсом переписывается в регистр 14, а импульсом с выхода элемента 11 задержки счетчик 8 обнуляется, Таким образом, значение кода счетчика 7 обратно пропорционально скорости оси, а значение кода счетчика 8 пропорционально межосевому расстоянию, Вычислитель 15 вычисляет межосные расстояния по выше- и риведен ной фо рмуле.Вычислитель (фиг.2) работает следующим образом.Импульсом с выхода формирователя 4 (вход 3 вычислителя) в счетчик 18 записывается код(Ж регистра 13, в счетчик 19-код тр регистра 14, счетчик 20 обнуляется, а триггер 21 устанавливается в единичное состояние, разрешая счет счетчиком 18 и 19. Делитель 17 частоты 1 т (генератор этой частоты - последовательности импульсов - не показан) имеет коэффициент деления, пропорциональный расстоянию между датчиками 19, поэтому частота на счетном входе счетчика 18 в9 раз ниже частоты на счетном входе счетчика 19. При каждом переполнении счетчика 19 импульс переноса просчитывается счетчиком 20 и, проходя через элемент ИЛИ 22, разрешает повторную запись кода 19 в счетчик 19. После переполнения счетчика 18 импульс переноса с его выхода опрокидывает триггер 21, запрещая счет счетчиков 18 и 19. Выходной код счетчика 20, определяемый числом переполнений счетчика 19 за время одного переполнения счетчика 18, соответствует вычисленному межосному расстоянию,Коды вычисленных межосных расстояний импульсом с выхода элемента 12 задержки переписывается в регистр 9 (фиг.1),Этот код с каждого пункта контроля передается на центральную ЭВМ в сопровождении служебной информации (принадлежность к данному пункту контроля, время прохода поезда, его параметры и техническое состояние и т,р), где заносится в определенную область памяти. Далее процесс идентификации проводится путем сравнения числа осей и количества вагонов в поездах, проследовавших первый и второй пункты контроля, а при их равенстве(56) Патент Англии М 1418156,кл, В 61 3 25/02, 1986.Авторское свидетельство СССРМ 1439011, кл. В 61 1 25/00, 1988.5 Подсистема ДИСК-Ц для централизации информации с линейных пунктов контроля технического состояния подвижного состава на ходу поезда, Техническое описа нив 78 ЦТО, 1984. Ф ор мул а и зоб рет ения 1, СПОСОБ ИДЕНТИФИКАЦИИ ПОЕЗДОВ, ЗдКЛЮ- чающийся в том, что определяют и записывают число осей и подвижных единиц каждого поезда, проследовавшего через один иэ контрольных пунктов, определяют и записывают число осей и подвижных единиц поезда, проследовавшего через другой контрольный пункт, которые последовательно сравнивают с записанными при проследовании поездами через первый контрольный пункт, в случае фиксации 25 равенства числа осей и подвижных единиц поезда, проследовавшего через второй контрольный пункт, и одного иэ поездов, проследовавших через первый контрольный пункт, прекращают дальнейшее срав нение и формируют сигнал опознания поезда, отличающийся тем, что одновременно с определением и записью числа осей и подвижных единиц поездов, проследовавших через первый и второй конт рольные пункты, определяют и осуществляют последовательную запись значений межосных расстояний указанных поездов, последовательное сравнение числа осей и подвижных единиц поезда, про следовавшего через второй контрольный пункт, и поездов, проследовавших через первый контрольный пункт, продолжают после фиксации равенства числа осей и подвижных единиц поезда. проследовавшего45 через первый контрольный пункт, и одного из поездов, проследовавших через второй контрольный пункт, фиксируют наличие других поездов, проследовавших через первый контрольный пункт и имеющих число осей и подвижных единиц, равное числу осей и подвижных единиц поезда, проследовавшего через второй контрольный пункт, и сравнивают каждое значение межосного расстояния поезда, проследовавшего через второй контрольный пункт,сравниваются последовательности межосных Расстояний поездов с равным количеством осей и вагонов. При совпадении с заданной точностью последовательностей межосных расстояний данного поезда с одной из имеющихся в памяти, поступивших с предыдущего пункта контроля (ретроспектива определяется возможным временем хода поездов на участке централизации), формируется сигнал идентификации поезда. с соответствующим значением межосного расстояния каждого из поездов. проследовавших через первый контрольный пункт и имеющих число осей и подвижных единиц, равное числу осей и подвижных единиц поезда, проследовавшего через второй контрольный пункт, а сигнал опознания поезда формируют в случае равенства всех значений межосных расстояний поезда, проследовавшего через второй контрольный пункт, и одного иэ поездов, проследовавших через первый контрольный пункт и имеющих число осей и подвижных единиц, равное числу осей и подвижных единиц поезда, проследовавшего через первый контрольныйпункт.2. Способ по п.1, отличающийся тем, что для определения значений межосных расстояний фиксируют первым датчиком прохода осей проследование первой контрольной точки одной и другой осями, определяют интервал времени между проследованием первой контрольной точки первой осью и проследованием первой контрольной точки второй осью, фиксируют вторым датчиком прохода осей проследование первой осью второй контрольной точки, расположенной на расстоянии, мвньшем минимально возможного значения межосного расстояния от первой, определяют интервал времени между проследованием первой осью первой и второй контрольных точек и вычисляют значение межосного расстояния Ь по формуле где 1.9 - расстояние между контрольными точками;ц - интервал времени между проследованием первой контрольной точки одной и другой осями;19, - интервал времени между проследованивм первой осью первой и второй контрольных точек, 20009782000978 фиг. 2 Составитель В. БанниковТехред М.Моргентал Корректор Н.Милюкова Редактор Н, Федорова Тираж Подписное НПО "Поиск" Роспатента113035, Москва, Ж, Раушская наб., 4/5 Заказ 3105 Производственно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина, 101
СмотретьЗаявка
4929739, 22.04.1991
Уральское проектно-конструкторское бюро "Деталь"
Банников Виталий Митрофанович, Понкин Андрей Валентинович, Чуриков Игорь Владимирович
МПК / Метки
МПК: B61L 25/00
Метки: идентификации, поездов
Опубликовано: 15.10.1993
Код ссылки
<a href="https://patents.su/6-2000978-sposob-identifikacii-poezdov.html" target="_blank" rel="follow" title="База патентов СССР">Способ идентификации поездов</a>
Устройство для автоматической записи номеров маршрутов поездов и времени их проследования мимо контрольных пунктов

Номер патента: 132661
Опубликовано: 01.01.1960
Авторы: Ахмаков, Карпов, Чеботаревский
МПК: B61L 25/02
Метки: автоматической, времени, записи, контрольных, маршрутов, мимо, номеров, поездов, проследования, пунктов
...допускает применение любого канала связи, вместо проводов, Могут быть использованы высокочастотные каналы телефонирования, посылка специальных частотных кодов по двухпроводной линии, общей для всех контрольных пунктов, и т. д,Применение десяти различных светофильтров позволяет передавать номера маршрутов и поездов без их кодирования. При меньшем числе светофильтров такие же возможности создает включение на центральном пункте простейшего счетно-решающего механизма. В последнем случае возможна специальная сигнализация, появляющаяся при нарушениях заданного графика движения (программы),Устройство работает следующим образом.При движении вагона мимо контрольного пункта лучи осветителя 24 через светофильтр 21 направляются на все...
Способ идентификации поездов
Номер патента: 2000979
Опубликовано: 15.10.1993
Авторы: Банников, Понкин, Чуриков
МПК: B61L 25/00
Метки: идентификации, поездов
...содержит первый 1 и второй2 датчики прохода колес (например, индуктивные, тензорезисторные и т.р,), первый 3и второй 4 преобразователи сигналов датчиков в импульсы логического вида (например,последовательно соединенные усилитель икомпаратор), формирователь 5 временногоинтервала т (ВЯ - триггер), формирователь бвременного интервала т (счетный триггер спредустановкой, счетчики 7, 8, регистр 9 памяти, генератор 10 эталонных импульсов,генератор 11 импульса переписи, генератор12 импульса сброса, ЭВМ 13 пункта контроля (микропроцессорное вычислительное устройство) и центральную ЭВМ 14.Устройство работает следующим образом,В исходном состоянии триггеры 5, 6счетчики 7, 8 и регистр 9 обнулены, счетзапрещен. При проходе первого колеса...
Устройство для счета осей и подвижных единиц железнодорожного подвижного состава

Номер патента: 2003540
Опубликовано: 30.11.1993
Авторы: Брегвадзе, Гургенидзе, Данелия, Мгебришвили, Сартания
МПК: B61L 1/16
Метки: единиц, железнодорожного, осей, подвижного, подвижных, состава, счета
...импульсов через третий логиче 55 ский элемент 11 подключен к второму входублока 4 измерения интервала и обнуливающим входам первого 9 и второго 10 логических элементов,Устройство работает следующим образом.При каждом наезде оси колесной пары в зону срабатывания магнитного датчика с формирователем, расположенного в непосредственной близости от рельса, последовательности единичных (соответствует наличию осей) и нулевых (соответствует интервалу между осями) импульсов поступают на входы основного элемента 2, дополнительного элемента 3 и блока 4 измерения интервала, На выходе блока 4 в это время выдается,запретный сигнал, который, закрывая основной элемент 2, через элемент НЕ 6 открывает дополнительный элемент 3. При этом...
Устройство для магнитной записи на ферромагнитном колесе подвижной единицы

Номер патента: 1432596
Опубликовано: 23.10.1988
Авторы: Бабаев, Гриднев, Домницкий, Золочевский, Кошевой, Майборода, Прилипко, Светличный, Соболев, Соколов
МПК: G11B 5/00
Метки: единицы, записи, колесе, магнитной, подвижной, ферромагнитном
...- через четвертый коммутатор 7 к обмотке 17 второго элемента 9 секторной записи.При въезде ферромагнитного колеса 11 первой колесной пары подвижной единицы в зону записи срабатывает первый датчик 3 Ферромагнитной массы, сигнал которого вызывает появление на первом выходе формирователя 1 сигнала записи первого бита информации и запитку обмотки 17 первого элемен- та 8 секторной записи током первого коммутатора 4, имеющим направление, определяемое битом информации на пер" вом выходе формирователя 1 сигнала записи. Ток через обмотку 17 первого элемента 8 секторной записи образует магнитный поток через его магнитный сердечник 18, участки рельсов 10 между немагнитными стыками 20, Ферромагнитные колеса 11 и ось 12 из маг. нитного материала....
Устройство для одновременного измерения бандажей (или ободов) и шеек осей колесных пар подвижного состава

Номер патента: 44357
Опубликовано: 30.09.1935
Автор: Загоскин
МПК: B61K 9/12
Метки: бандажей, или, колесных, ободов, одновременного, осей, пар, подвижного, состава, шеек
...вид измерителя бандажа сверху; фиг. 5 в боков вид измерителя бандажа; фиг, б - вид измерителя шейки; фиг. 7 - вид этого измерителя сверху; фиг. 8 - боковой вид измерителя шейки; фиг. 9 в в измерителя обода колеса; фиг, 10 в в этого измерителя сверху; фиг, 11 в боков вид того же измерителя. Посредине устройства установлена контрольная площадка б (фиг. 1), служащая для возможности проверки всего устройства специальным контрольным шаблоном. На боковой стороне контрольной площадки установлена горизонтальная стрелка 7, каковая служит для проверки прямолинейности поперечины 1. Вся система подвешивается к потолку помещения, где будет находиться на двух державах 8.Вертикальные подвески 2 имеют горизонтальное перемещение по поперечине 1, для...
Предыдущий патент: Устройство для регулирования расхода электроэнергии при электрообогреве стрелочных переводов железнодорожного транспорта
Следующий патент: Способ идентификации поездов
Случайный патент: 169406